Boxfish USBL User manual
Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p1

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p2

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p3
Table of Contents
1 Introduction to the Boxfish USBL system .........................................................4
1.1 Components in the USBL system.....................................................................4
1.2 Boxfish USBL app ..............................................................................................4
2 Overview of USBL on Boxfish Control Station .................................................5
2.1 Boxfish ROV and Boxfish Luna ......................................................................5
2.2 Boxfish Alpha.......................................................................................................5
3 Connecting components .........................................................................................6
3.1 Required hardware.............................................................................................6
3.2 Connection overview diagram .......................................................................6
4 How to use USBL system to view position of the ROV .................................7
4.1 Mount local beacon ...........................................................................................7
4.2 Connect Boxfish ROV components .............................................................7
4.3 Connect USBL components to Control Station.......................................7
4.4 Turn Sensor Power ON.................................................................................... 8
4.5 View location of your ROV ............................................................................. 8
5 About the Boxfish USBL app..................................................................................9

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p4
1 Introduction to the Boxfish USBL system
Our USBL is the SeaTrac PinPoint Tracking System from Blueprint Lab.
1.1 Components in the USBL system
The system consists of the below components.
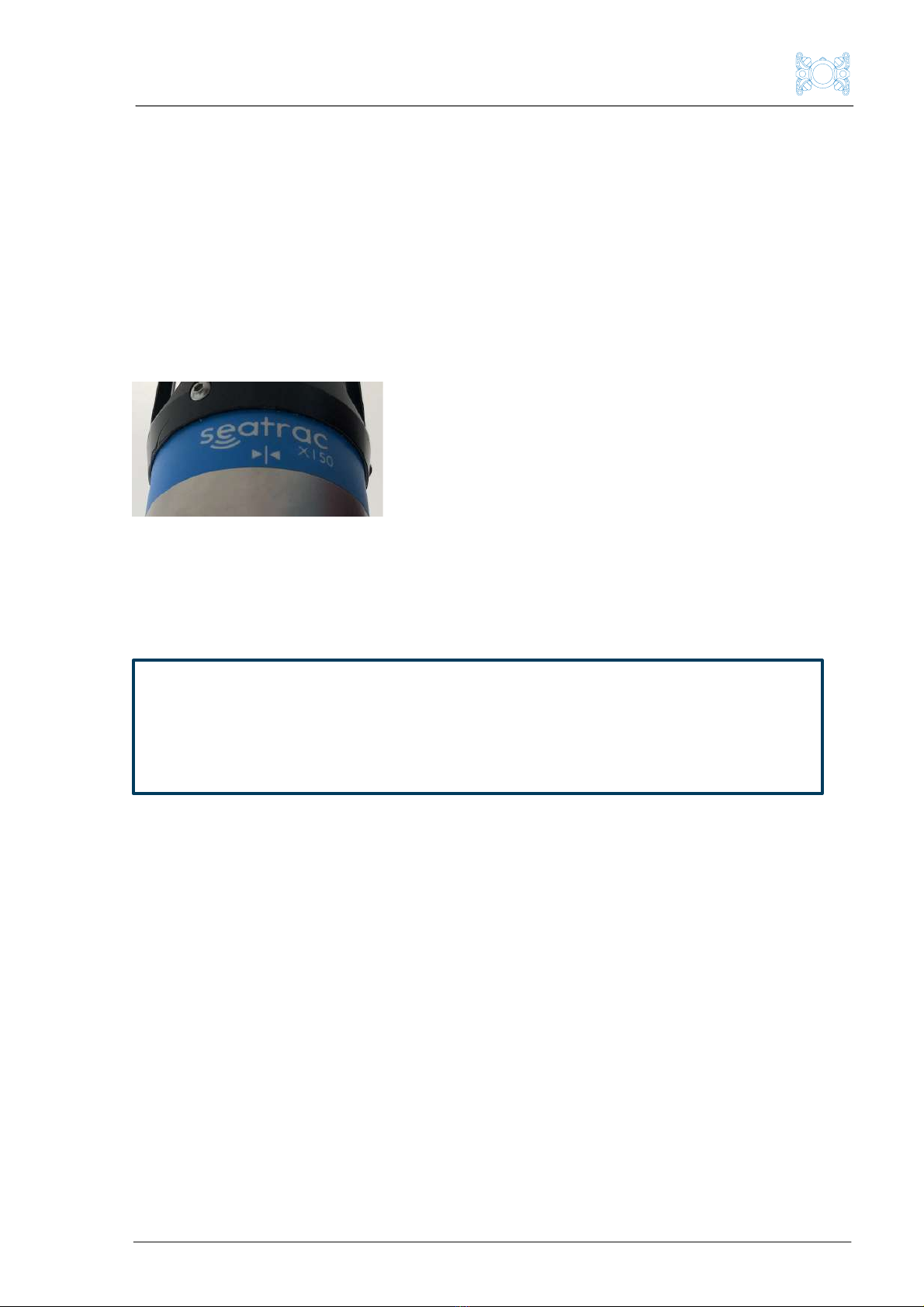
1.1.1 Local beacon (X150 USBL beacon)
The local beacon should be mounted at a fixed position below the surface.
Power can be supplied to the beacon via the Boxfish Control Station, AC
power or an alternative source (9V to 28V DC).
1.1.2 Remote beacon (X010 or X110 transponder beacon)
This beacon will be mounted to and powered by the ROV. The X010 beacon
is depth-rated for either 300m or 1000m; check with Boxfish as to which
version you have. The X110 beacon is rated to 1000m.
1.1.3 GNSS receiver
This provides the position of the system using satellite data. This receiver
connects to the Control Station’s right USB port.
1.2 Boxfish USBL app
Data from the USBL system is displayed on an application viewable on the
Boxfish Control Station telemetry screen so that you can see the position
and trajectory of your ROV (relative to the fixed position of your local
beacon), in real time.

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p5
2 Overview of USBL on Boxfish Control Station
2.1 Boxfish ROV and Boxfish Luna
Control Station and USBL app as seen on
Boxfish ROV
and
Boxfish Luna
2.2 Boxfish Alpha
Control Station and Boxfish USBL app as seen on
Boxfish Alpha

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p6
3 Connecting components
3.1 Required hardware
You will need:
Blueprint Lab USBL system. All components, (except the remote
beacon, which may already be mounted to the ROV), are contained in
the USBL 1485 Pelican Case from Blueprint Labs.
Boxfish ROV system, connected and powered on.
(Boxfish Alpha ROVs only) A power source for the local beacon. For
Boxfish Alpha ROVs, the Control Station is unable to provide power to
the local beacon, so you will need to use AC power or another power
source.
3.2 Connection overview diagram
Note: there is no EXT port on the Control Station for Boxfish Alpha, so
please use AC power or an alternative power supply.
Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p7
4 How to use USBL system to view position of the ROV
Please follow these steps in order.
4.1 Mount local beacon
When mounting the local beacon underneath the boat, ensure that the bar
between the two arrows is pointing in the same direction as the bow of the
boat. This is so the visual representation of the boat will appear correctly
oriented in the Boxfish USBL app.
Position the local beacon below the boat and orient it so that the bar
inbetween the arrows is pointing in the same direction as the bow of the
boat.
4.2 Connect Boxfish ROV components
1. Connect Boxfish ROV, tether and Control Station according to the
Boxfish ROV Owner’s Manual.
2. Power on ROV and Control Station. Check all ROV components are
communicating.
4.3 Connect USBL components to Control Station
4.3.1 Connect local beacon to Control Station
The local beacon has a Y-cable that should be connected to the following:
1. USB port on the Control Station USB port. If your USBL has a serial
connector instead of a USB connector, use the provided USB to serial
adapter.
2. Power source, either from Control Station ACCESSORY port, AC power,
or another device. Note: Control Stations for Boxfish Alpha ROV models
IMPORTANT!
You must power on the Control Station BEFORE attaching USBL devices
to the USB ports.

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p8
are unable to provide power to the local beacon; therefore AC power or
an alternative power source must be used.
4.3.2 Connect GNSS receiver to Control Station
The GNSS receiver plugs into the right-hand USB port.
4.4 Turn Sensor Power ON
Turn on the Sensor Power switch to supply power from the ROV to the
remote beacon.
4.5 View location of your ROV
You can view the location of the ROV (and GPS coordinates) via the USBL
application (USBL tab) on the bottom right of the telemetry screen. The
next section describes the application in more detail.
Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p9
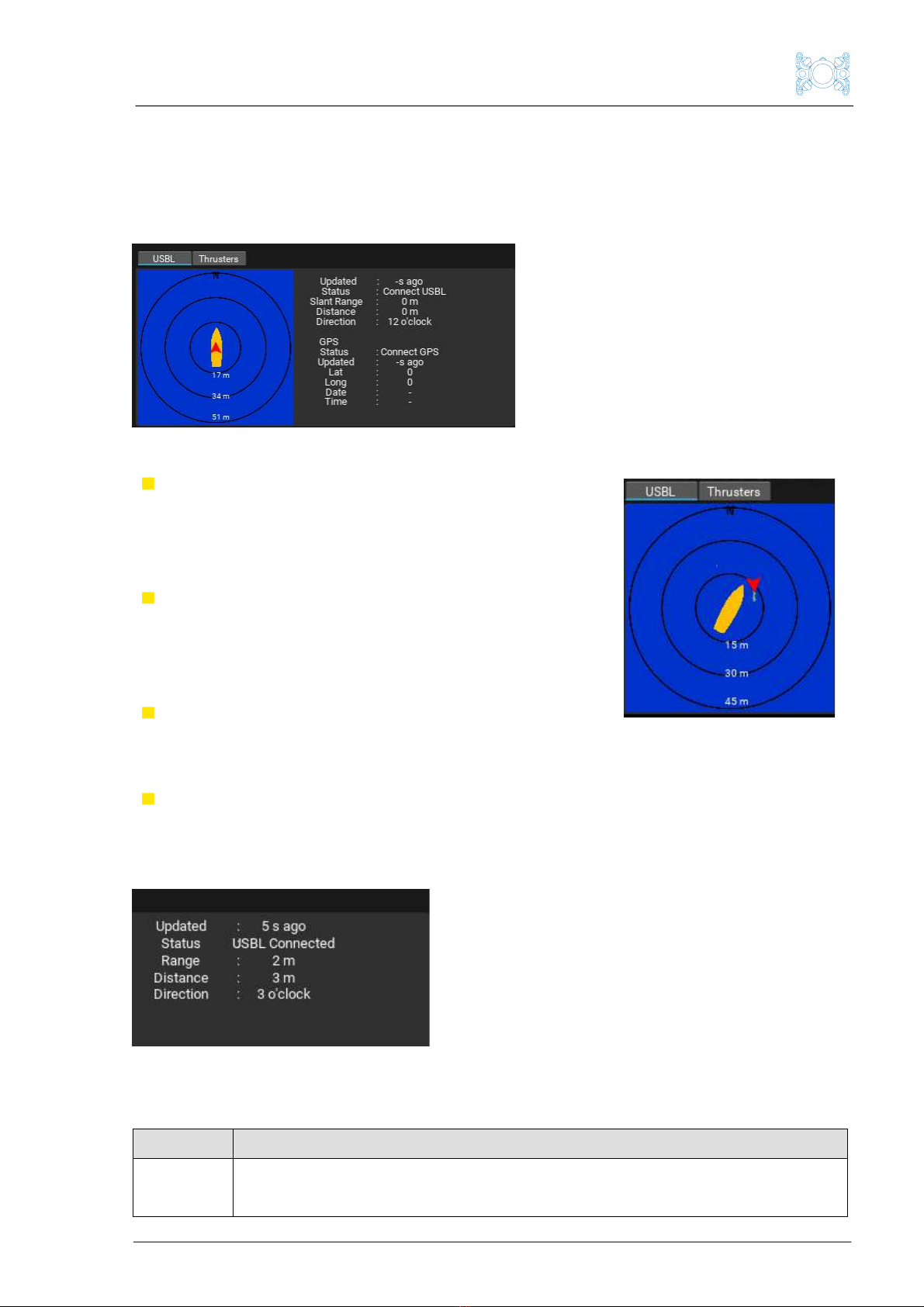
5 About the Boxfish USBL app
The USBL available on the Control Station, at the bottom right of the
telemetry screen.
The app displays a topological map with the following features:
The local beacon is represented by a yellow
boat at the map centre. The bow of the boat is
in the direction of the two arrows of the local
beacon.
The ROV/remote beacon is represented by the
red arrow. The tip of the arrow is pointing in the
direction the ROV is heading according to its
onboard compass.
The ROV trajectory is shown by the green trail,
showing a smoothed path over the last 10 data
points.
Three concentric circles depict the ROV’s range from the boat. These will
dynamically zoom out if the ROV moves beyond the outer circle.
Data fields are displayed to the right of the map:
Note: If a GPS device is present, the app can also display GPS coordinates
(lat/lon) and date/time information.
Field
Information
Updated
Signifies the time passed (in seconds) since the remote beacon
was last heard. “-” signifies the beacon has not been heard yet.

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p10
Status
Shows the current state of the local USBL beacon:
USBL Connected: The local USBL is connected to the Control
Station.
Connect USBL: Local USBL is not connected to the Control
Station (via the Serial to USB adapter).
Connection Broken:Serial to USB adapter is connected to the
Control Station, but local USBL is not connected to the adapter.
Distance
and
Slant
Range
Distance is the horizontal distance in metres between the
boat and the point at the surface directly above the ROV.
Slant range is the Point to point distance between the ROV
beacon and the local beacon in metres. If the tether is taut,
this would be the length of the tether.
Direction
Direction of the ROV’s location relative to the local beacon (boat).
Make sure the local beacon’s heading is same as the boat’s
heading. This can be ensured by pointing the LED on the local
beacon towards the front end of the boat

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p11

Boxfish USBL User Manual
All rights reserved. Information and specifications may change at any time without notice. p12
Other manuals for USBL
1
Table of contents

















