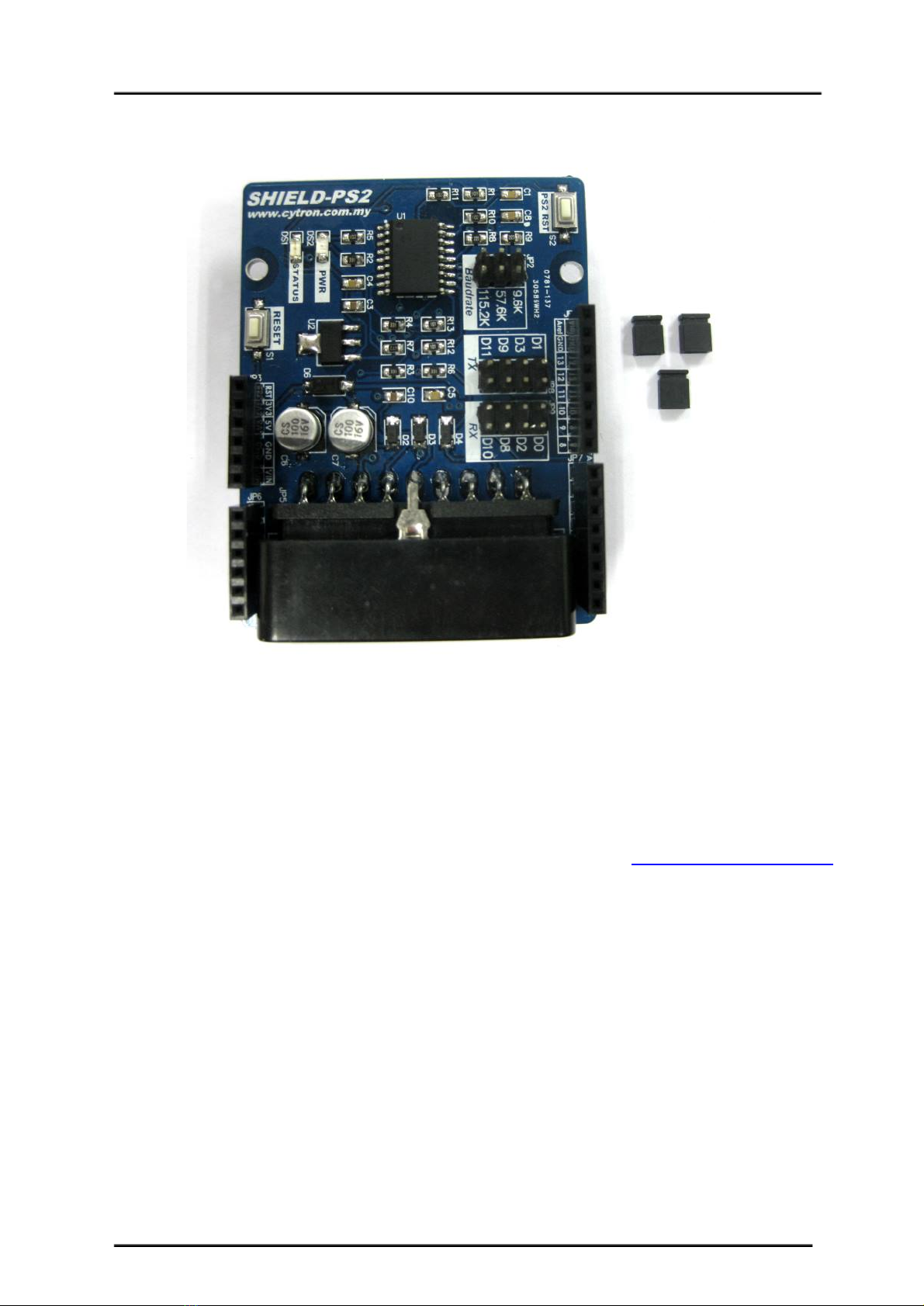
1.0INTRODUCTIONANDOVERVIEW
Cytron PS2 Shield (SHIELDPS2) is an Arduino compatible shield which is compatible with
Arduino UNO, Arduino Duemilanove, Arduino Mega, Arduino Leonardo and possibly other pin
compatible main boards. Cytron PS2 Shield offers a compact yet reliable PS2 Controller
Converter for user. Cytron PS2 Shield is powered from Arduino main board. with Cytron PS2
Shield Reading Joystick and button’s state of PS2 controller will be as easy as reading UART data.
ItoffersastandardconnectorforSONYPS2controllertoplugin,eitherwiredorwireless.
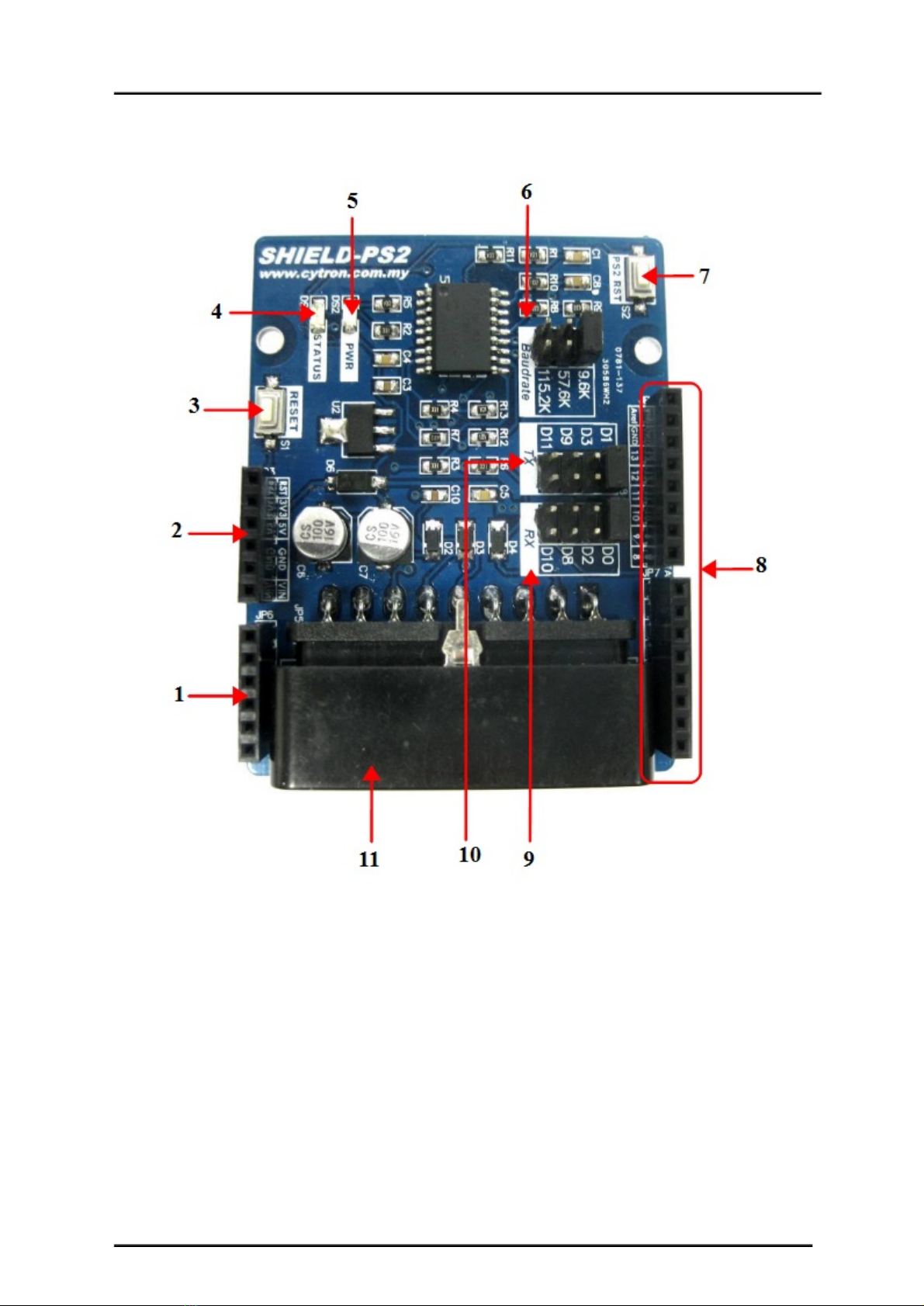
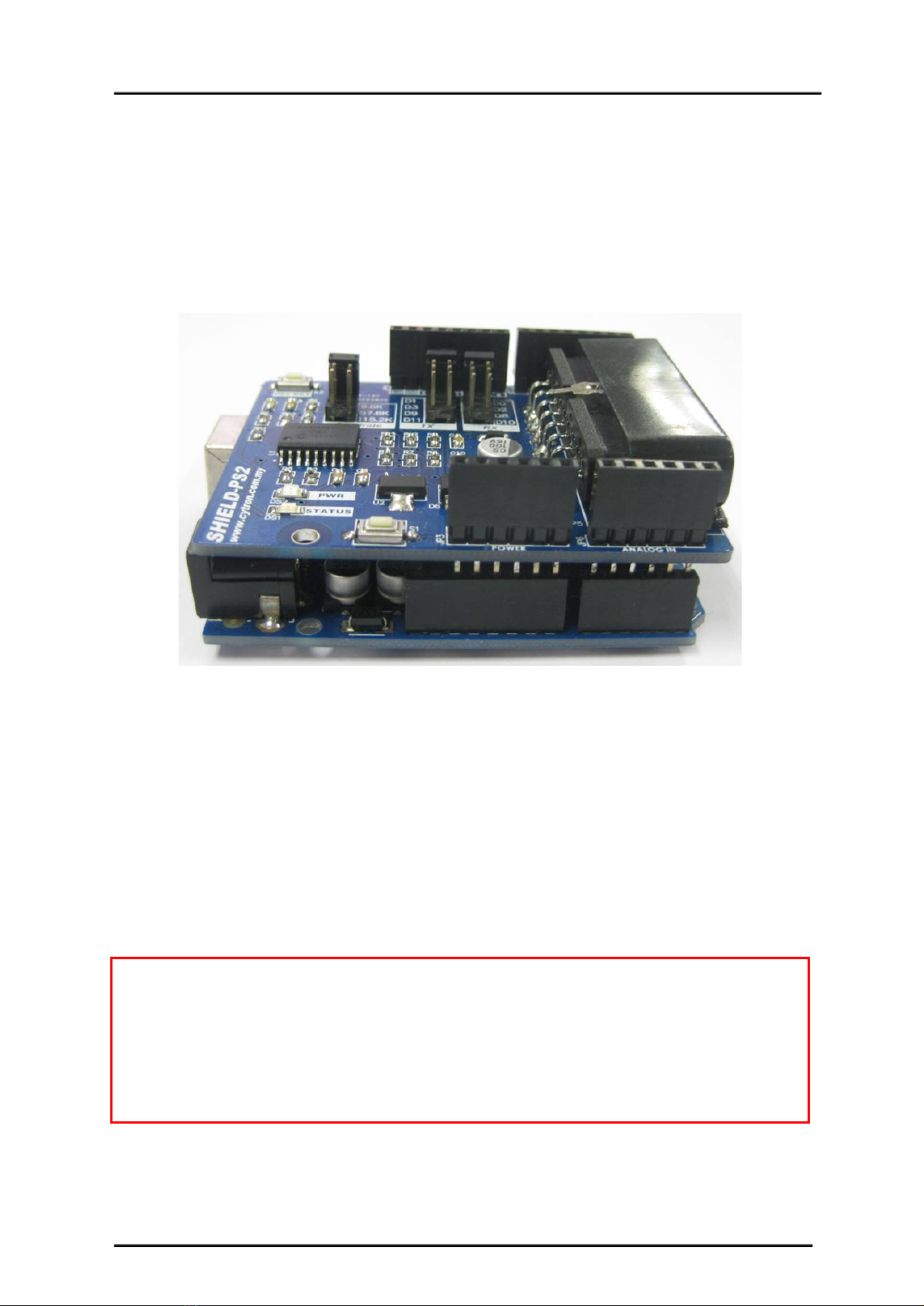
ShieldPS2 has stackable side headers which allows for more Arduino shields to be stacked on top
of it. Besides, user has option to use either hardware or software UART with Arduino’s main
board to communication to get the PS2 controller status. ShieldPS2 reset is connect to arduino’s
analogpin1(A1).Usercanpulldownthisanalogpintoresettheshield.
Features:
● 5Vpowered,lowcurrentconsumption.
● SimpletouseUARTprotocol
● VibratormotoronPS2iscontrollable.
● WiredandWirelessPS2controllerissupported.
● PS2Controllerwillautomaticallyoperateinanalogmode.
● AstatusLED
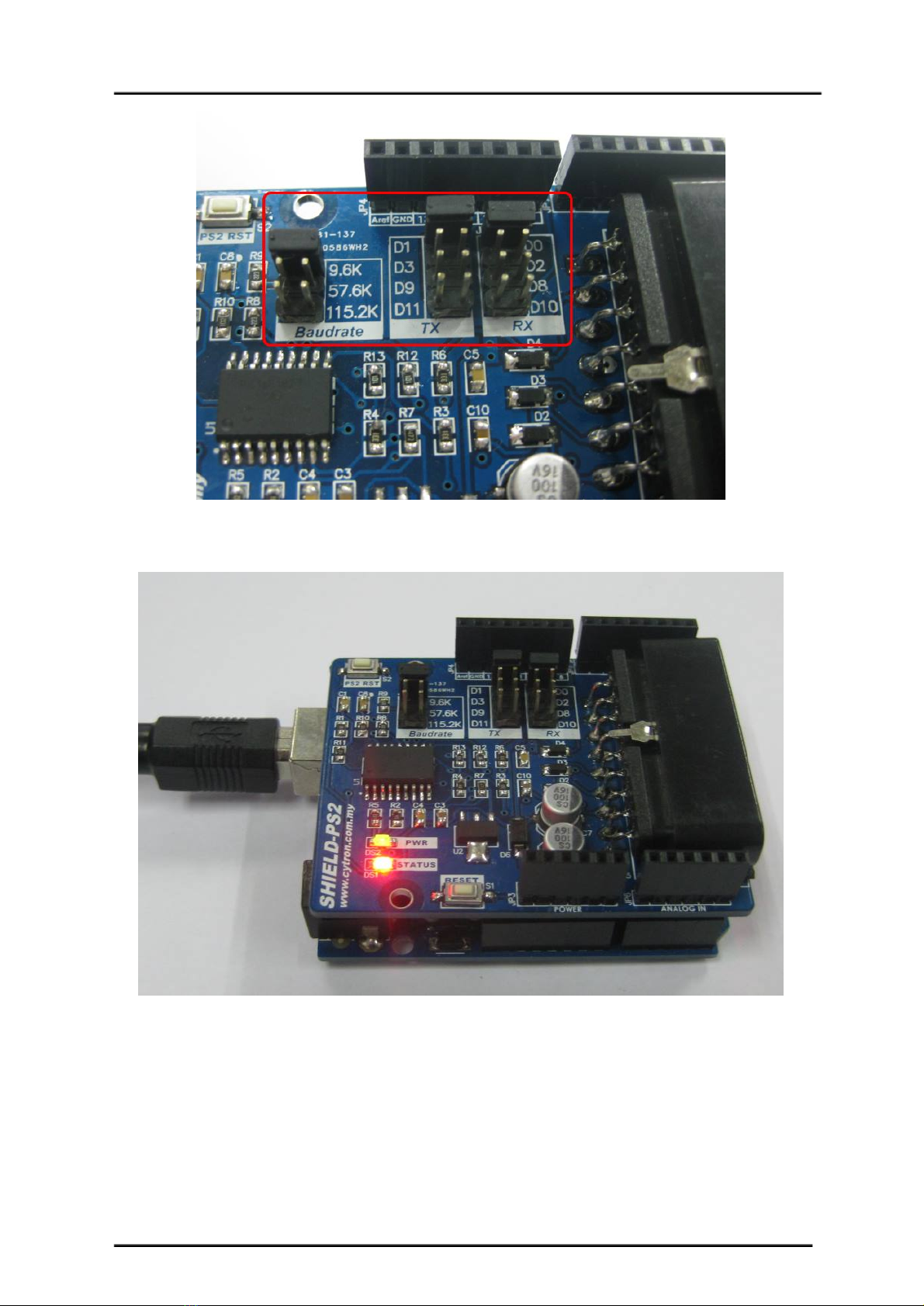
● JumperselectortoselectdifferentUARTBaudRate(4800,9600,57600,115200).
● JumperselectorstoselectdifferentdigitalpinasUARTTXandRXpin.
CreatedbyCytronTechnologiesSdn.Bhd.–AllRightsReserved 3