ROBOT . HEAD to TOE
Product User’s Manual – Shield-PS2
1.0 INTRODUCTION AND OVERVIEW
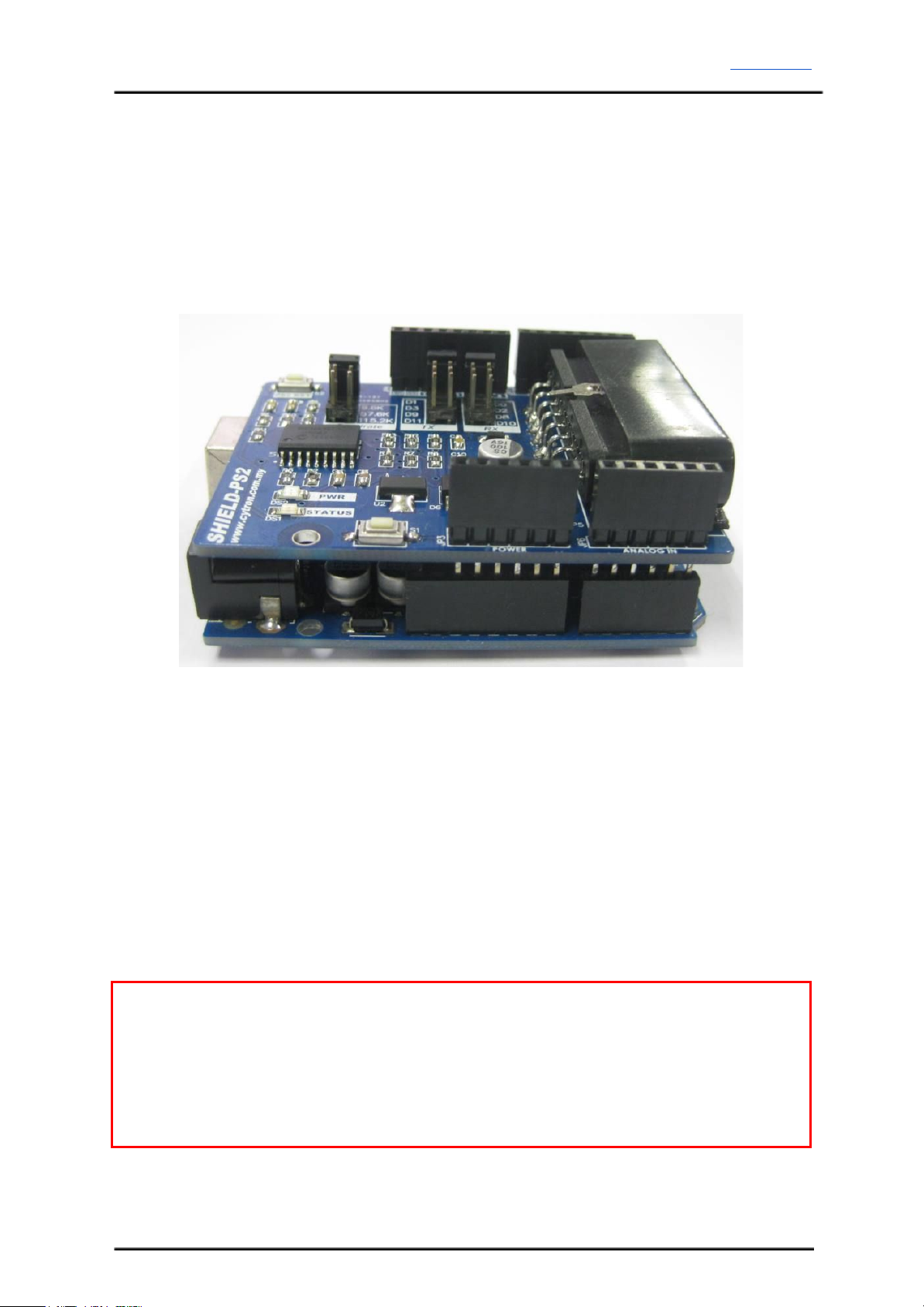
Cytron PS2 Shield (SHIELD-PS2) is an Arduino compatible shield which is compatible with
Arduino UNO,Arduino Duemilanove,Arduino Mega, Arduino Leonardo and possibly other
pin compatible main boards. Cytron PS2 Shield offers a compact yet reliable PS2 Controller
Converter for user. Cytron PS2 Shield is powered from Arduino main board. with Cytron PS2
Shield Reading Joy-stick and button’s state of PS2 controller will be as easy as reading
UART data. It offers a standard connector for SONY PS2 controller to plug-in, either wired
or wireless.
Shield-PS2 has stackable side headers which allows for more Arduino shields to be stacked
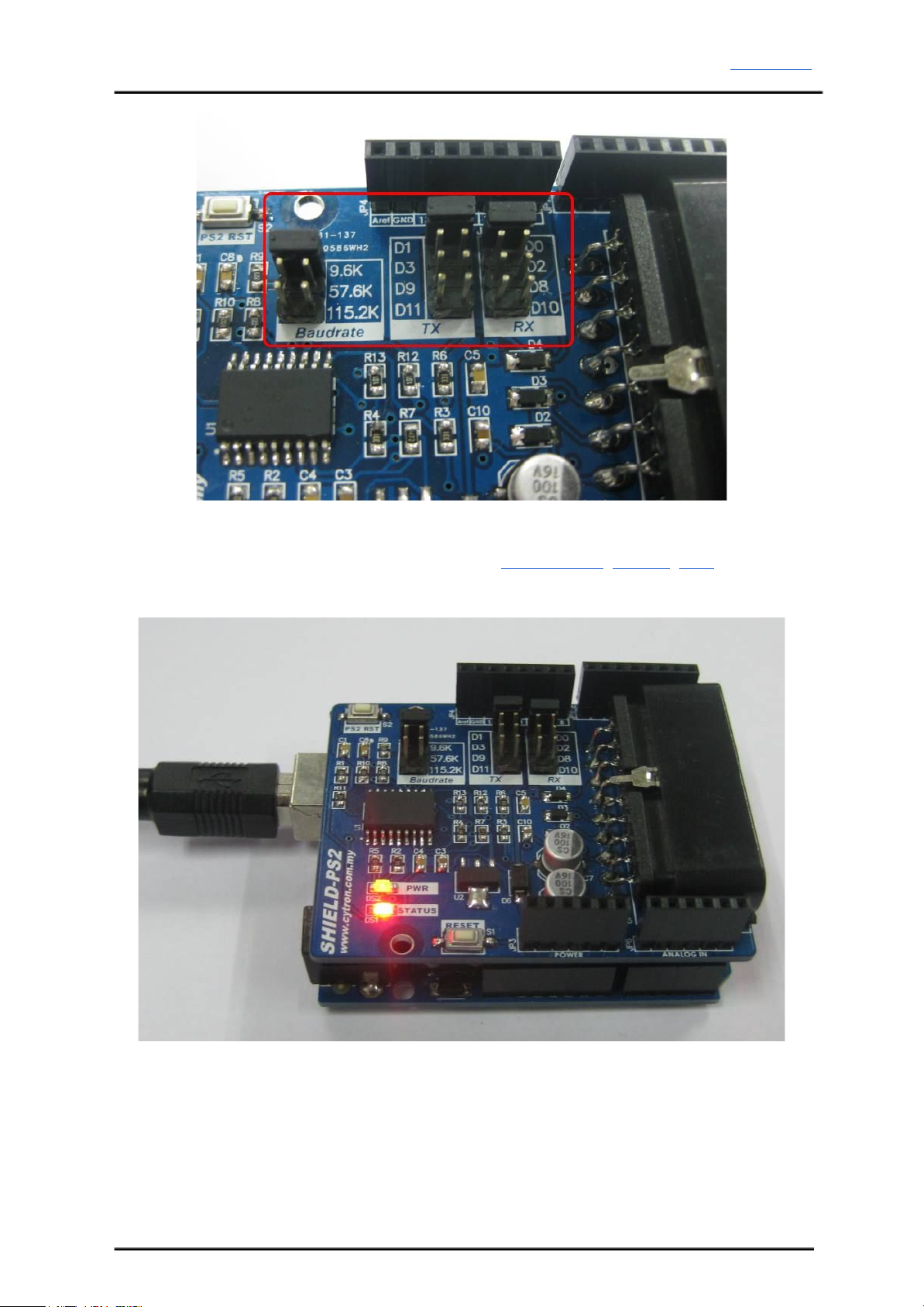
on top of it. Besides, user has option to use either hardware or software UART with
Arduino’s main board to communication to get the PS2 controller status. Shield-PS2 reset is
connected to arduino’s analog pin 1 (A1). User can pull down this analog pin to reset the
shield.
Features:
●5V powered, low current consumption.
●Simple to use UART protocol
●Vibrator motor on PS2 is controllable.
●Wired and Wireless PS2 controller is supported.
●PS2 Controller will automatically operate in analog mode.
●A status LED
●Jumper selector to select different UART Baud Rate (4800, 9600, 57600, 115200).
●Jumper selectors to select different digital pin as UART TX and RX pin.
Created by Cytron Technologies Sdn. Bhd. – All Rights Reserved 3