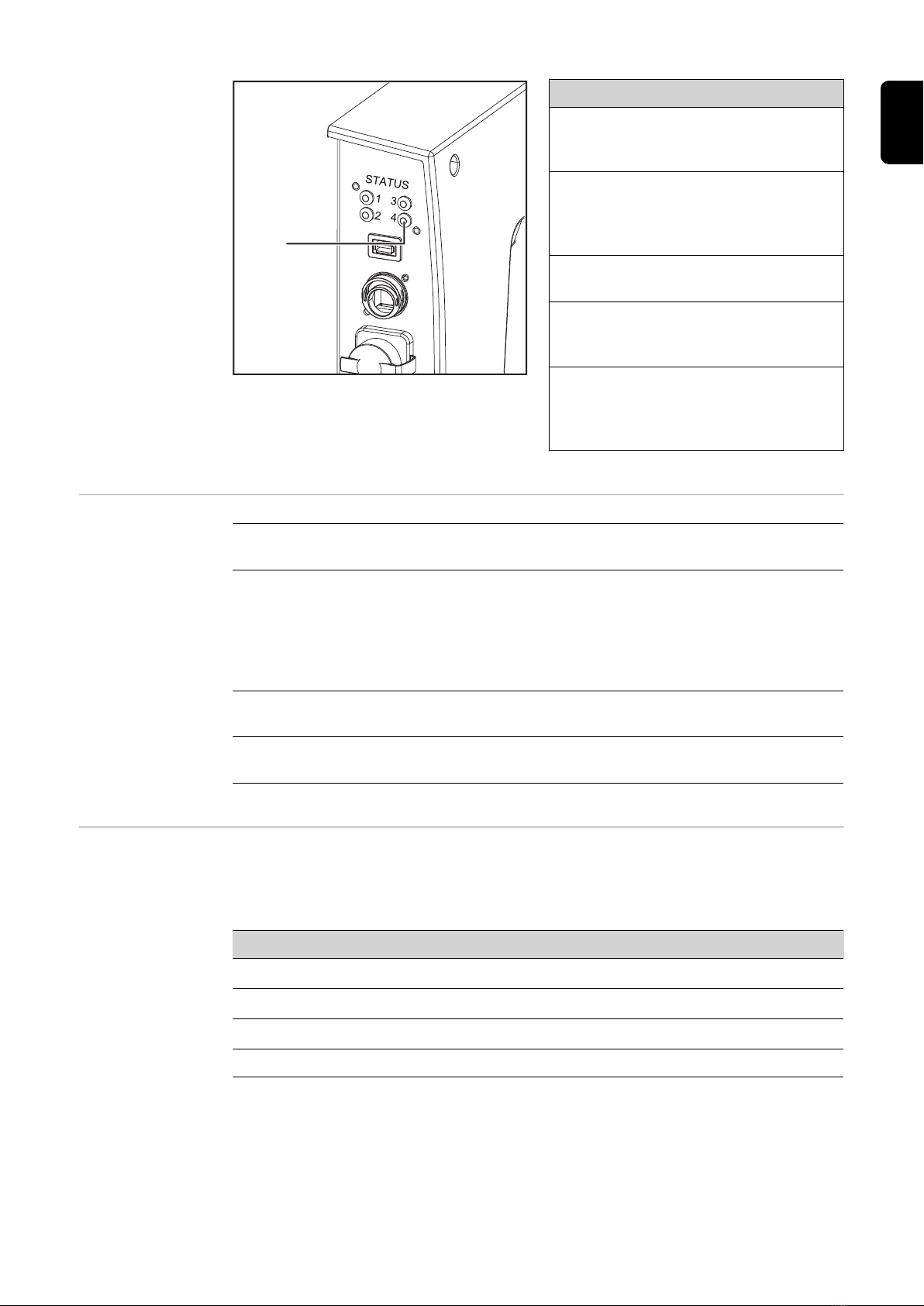
IP-Adresse des Busmoduls einstellen
IP-Adresse des
Busmoduls ein-
stellen
Die IP-Adresse des Busmoduls kann
eingestellt werden:
1.mit dem DIP-Schalter im Interface
im Bereich 192.168.0.xx
(xx = DIP-Schalterstellung = 1 bis
63)
-Werksseitig sind alle Positio-
nen in Stellung OFF geschal-
tet. In diesem Fall muss die
IP-Adresse auf der Website
der Stromquelle eingestellt
werden
2.auf der Website der Stromquelle
(wenn alle Positionen des DIP-
Schalters in Stellung OFF geschal-
tet sind)
Die IP-Adresse wird mit den Positionen 1 bis 6 des DIP-Schalters eingestellt. Die
Einstellung erfolgt im Binärformat. Das ergibt einen Einstellbereich von 1 bis 63
im Dezimalformat.
Beispiel für das Einstellen der IP-Adresse des Busmoduls mit dem DIP-
Schalter im Interface:
DIP-Schalter
8 7 6 5 4 3 2 1 IP-Adresse
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
Anleitung für das Einstellen der IP-Adresse auf der Website der Stromquelle:
IP-Adresse der verwendeten Stromquelle notieren:
1Am Bedienpanel der Stromquelle „Voreinstellungen“ auswählen
2Am Bedienpanel der Stromquelle „System“ auswählen
3Am Bedienpanel der Stromquelle „Information“ auswählen
4Angezeigte IP-Adresse notieren (Beispiel: 10.5.72.13)
Website der Stromquelle im Internetbrowser aufrufen:
5Computer mit dem Netzwerk der Stromquelle verbinden
6IP-Adresse der Stromquelle in die Suchleiste des Internetbrowsers eingeben
und bestätigen
7Standard-Benutzernamen (admin) und Passwort (admin) eingeben
-Website der Stromquelle wird angezeigt
IP-Adresse des Busmoduls einstellen:
8Auf der Website der Stromquelle den Reiter „RI FB PRO/i“ auswählen
7
DE