SAFETY INFORMATION
Warning! Not suitable for children under 3
years. Choking hazard — small parts may
be swallowed or inhaled. Strangulation
hazard — long string may become
wrapped around the neck.
Keep the packaging and the instructions as
they contain important information.
Store the experiment materials and
assembled models out of the reach of
small children.
The models are intended for indoor use.
Do not use your models in a sandbox or in
water.
The electronic components of this product are recyclable. For the sake of the
environment, do not throw them into the household trash at the end of their
lifespan.
They must be delivered to a collection location for electronic waste, as
indicated by the following symbol:
Please contact your local authorities for the appropriate disposal location.
Notes on Disposal of Electrical and Electronic Components
Before starting the experiments,
read through the instruction manual
together with your child and discuss
the safety information. Check to make
sure the models have been assembled
correctly, and assist your child with the
experiments.
We hope you and your child have a lot
of fun with the experiments!
Dear Parents and Adults,
››› Three AA batteries (1.5-volt, type LR6)
are required for operation.
››› The supply terminals are not to be
short-circuited. A short circuit can cause
the wires to overheat and the batteries
to explode.
››› Dierent types of batteries (e.g.,
rechargeable and standard) or new and
used batteries are not to be mixed.
››› Do not mix old and new batteries.
››› Do not mix alkaline, standard (carbon-
zinc), or rechargeable (nickel-cadmium)
batteries.
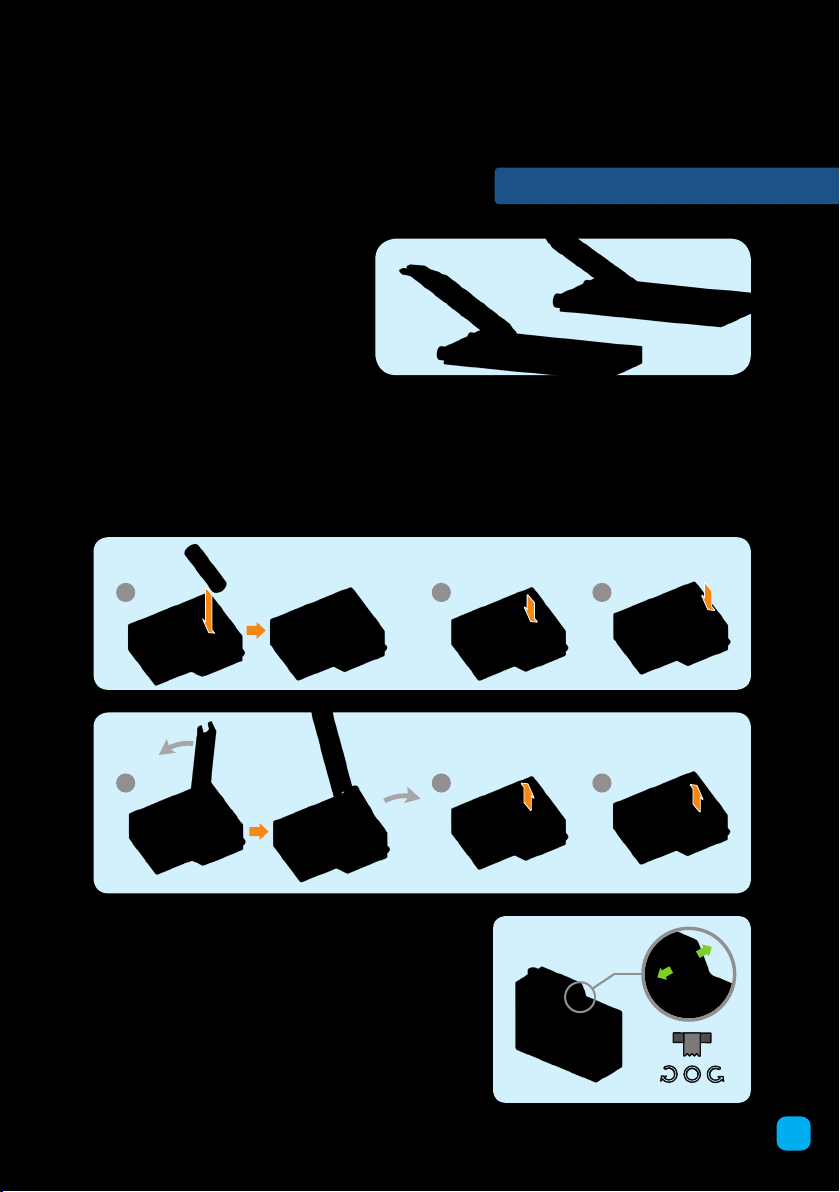
››› Batteries are to be inserted with the
correct polarity. Press them gently into
the battery compartment. See page 4.
››› Always close the battery compartment
with the lid.
››› Non-rechargeable batteries are not to be
recharged. They could explode!
››› Rechargeable batteries are only to be
charged under adult supervision.
››› Rechargeable batteries are to be removed
from the toy before being charged.
››› Exhausted batteries are to be removed
from the toy.
››› Dispose of used batteries in accordance
with environmental provisions, not in the
household trash.
››› Be sure not to bring batteries into contact
with coins, keys, or other metal objects.
››› Avoid deforming the batteries.
››› Please remove the batteries if the toy is
likely to be unused for a long time.
Safety Advice for Batteries
2