Preliminary Device Description HG G-19600ZA | English, Revision 02 | Date: 13.03.2018
3Table of Contents
Contents
1 About this Document ............................................................................. 5
1.1 Function................................................................................................................................. 5
1.2 Symbols ................................................................................................................................. 5
2 Introduction............................................................................................. 7
2.1 Range of Use ........................................................................................................................ 7
2.2 Qualification of the Users................................................................................................. 7
2.3 Intended Use ........................................................................................................................ 7
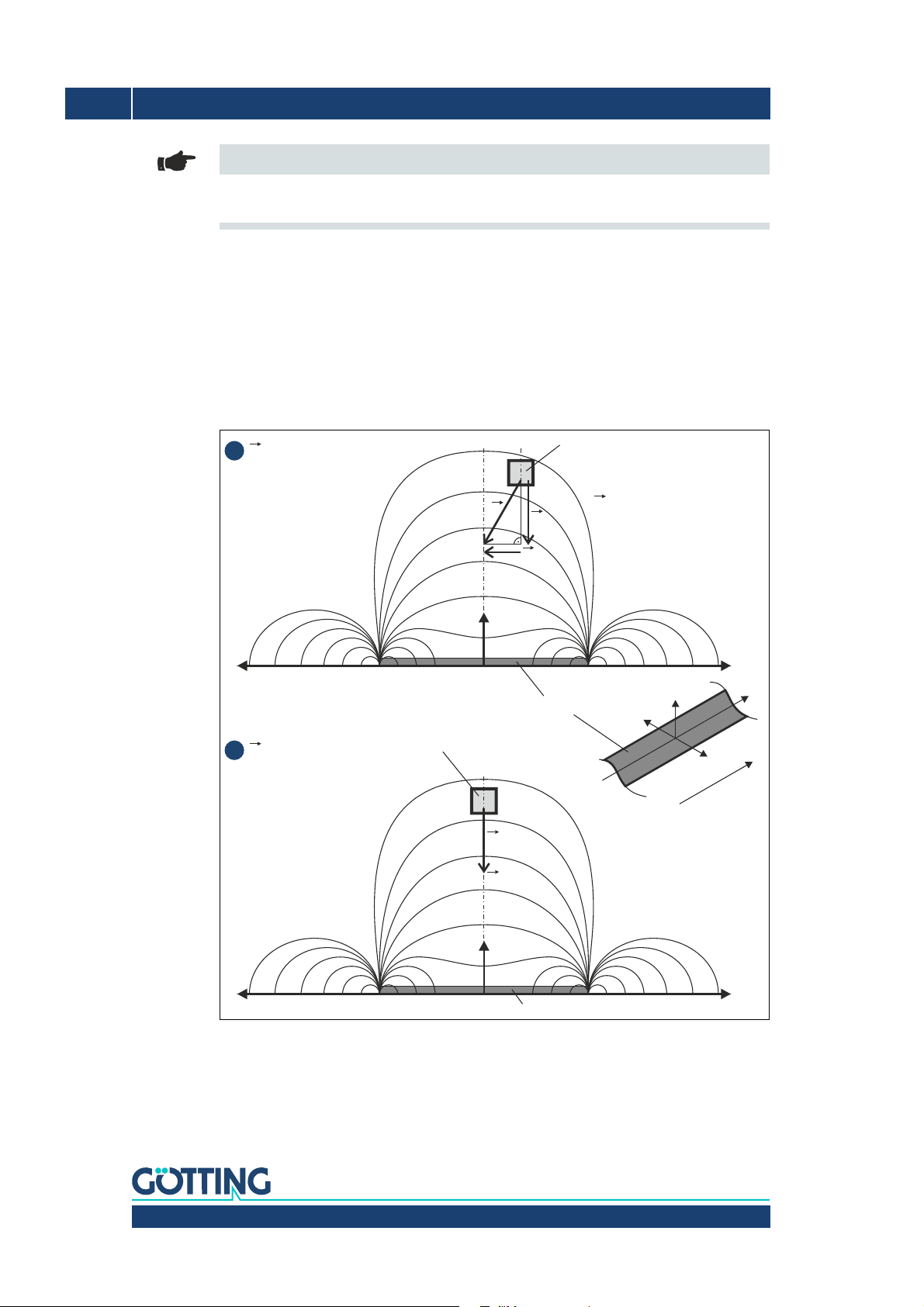
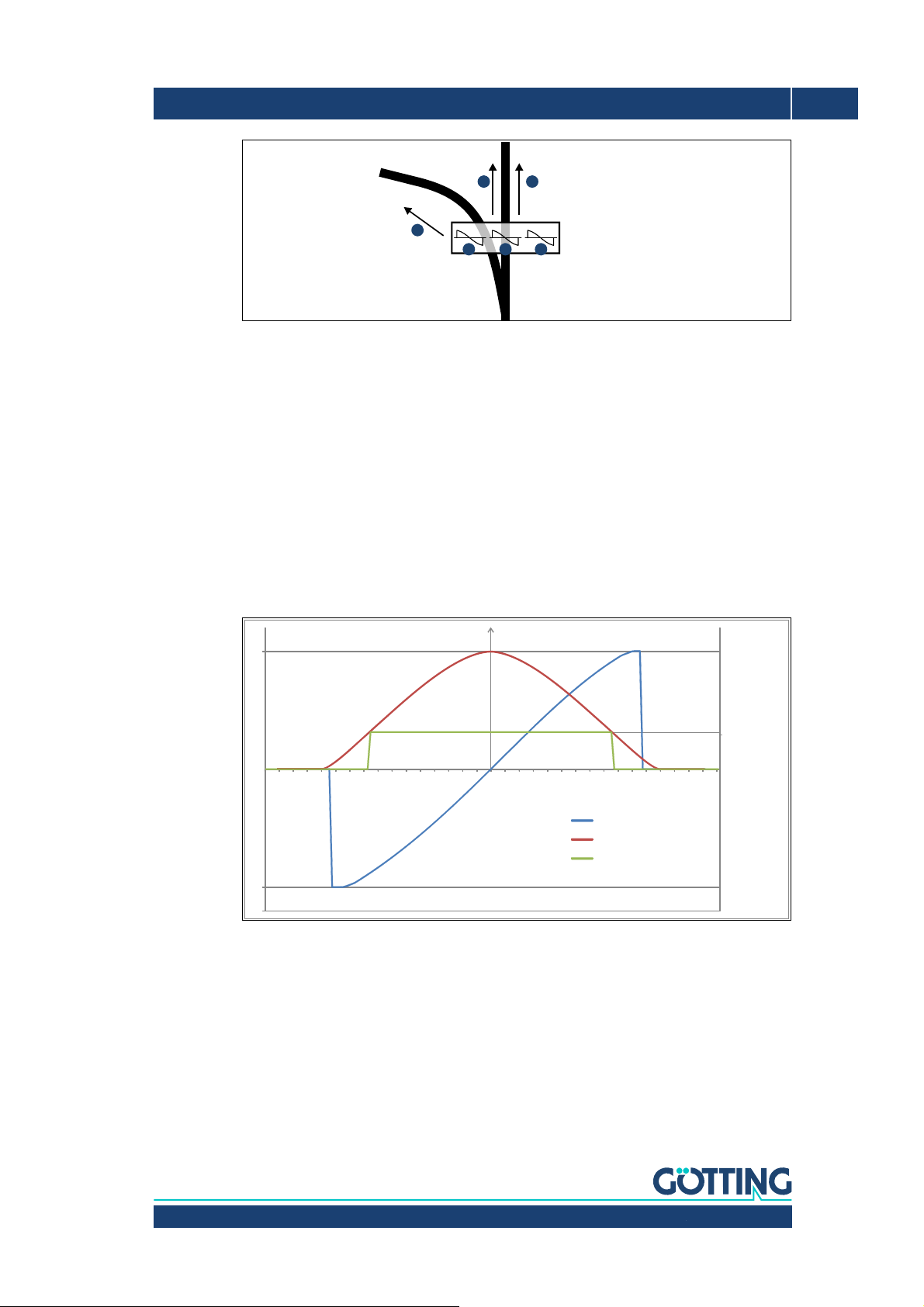
2.4 Functional Principle ........................................................................................................... 8
3 Mounting ............................................................................................... 10
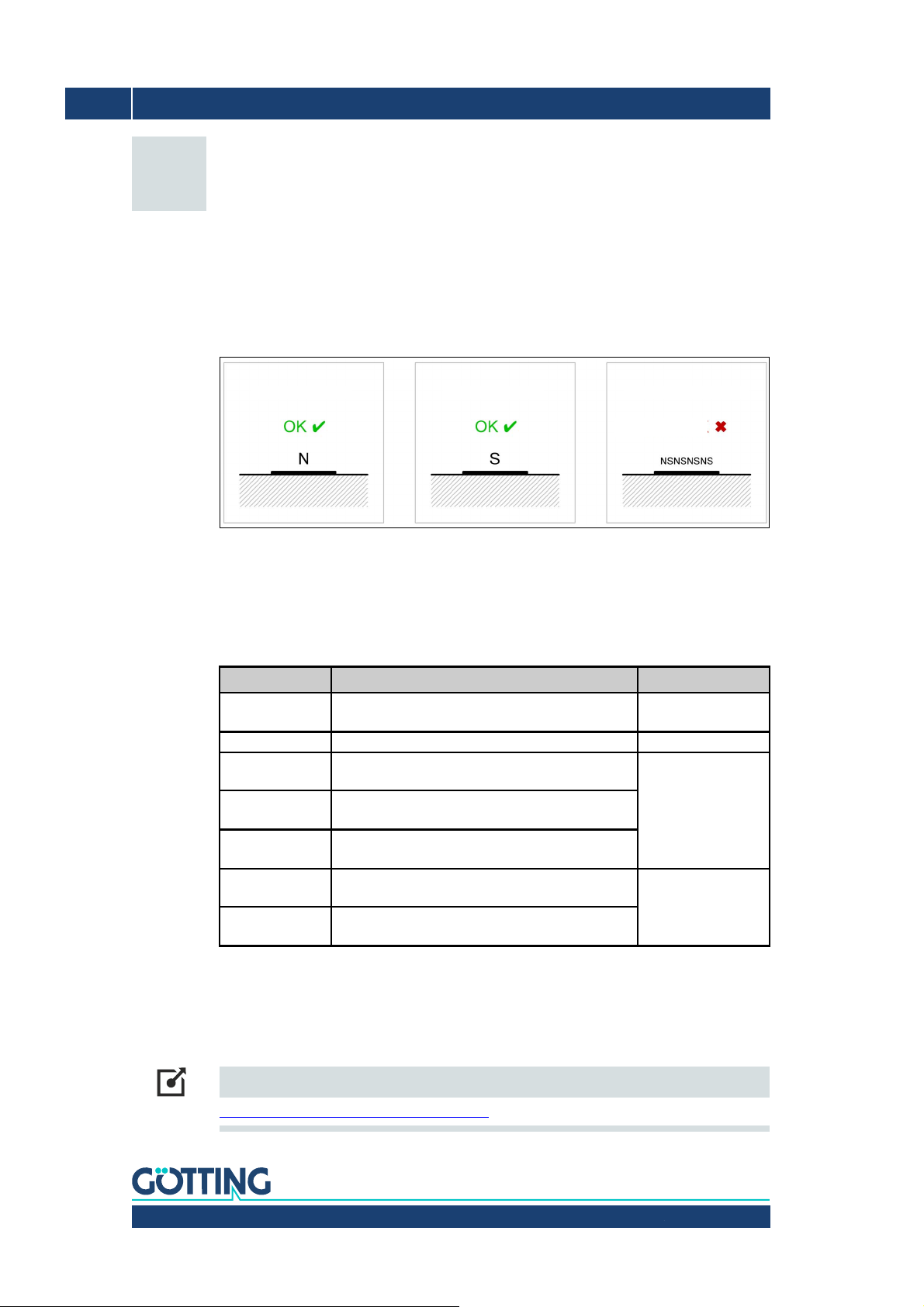
3.1 Magnetic Tape ...................................................................................................................10
3.1.1 Magnetic Tape Types ...................................................................................................................10
3.1.2 Magnetic Tape Installation .........................................................................................................10
3.2 Magnet Sensor ..................................................................................................................11
3.2.1 Requirements..................................................................................................................................11
3.2.2 Mounting on the Vehicle .............................................................................................................12
3.2.3 Connection Cable (assembled on one side) ..........................................................................13
4 Commissioning ..................................................................................... 14
4.1 Configuration of the Magnet Sensor ..........................................................................14
4.2 Compensation of Permanent Magnetic Interferences ..........................................16
4.2.1 Compensation of Static Magnetic Interferences .................................................................17
4.2.2 Deleting the Compensation........................................................................................................17
4.3 Automatic Calibration of the Track Detection .........................................................18
5 Hardware ............................................................................................... 19
5.1 LEDs ......................................................................................................................................19
5.2 Pin Assignment .................................................................................................................20
5.2.1 ST 1 Service / Configuration ......................................................................................................20
5.2.2 ST 2 Operation................................................................................................................................20
5.2.3 Digital Inputs Turnoff Selection ................................................................................................21
5.3 Turning off from the Main Track..................................................................................21
6 Software ................................................................................................22
6.1 Switch-On Behavior .........................................................................................................22
6.2 Connection to a PC via the Serial Interface .............................................................22
6.3 Terminal Program .............................................................................................................22
6.4 Service Program................................................................................................................23
6.4.1 (1) CSV Output................................................................................................................................24
6.4.2 (2) Settings ......................................................................................................................................26
6.4.3 (C) calibration settings .................................................................................................................27
6.4.4 (3) test monitor...............................................................................................................................28
6.4.5 (4) RAW data monitor...................................................................................................................29
6.4.6 Software Update (Firmware)......................................................................................................30
7 Maintenance.......................................................................................... 31