Device Description HG G-19370-B/HG G-19380-B | English, Revision 03 | Date: 05.05.2020
3
Table of Contents
Contents
1 About this Document........................................................................ 5
1.1 Function ................................................................................................................................... 5
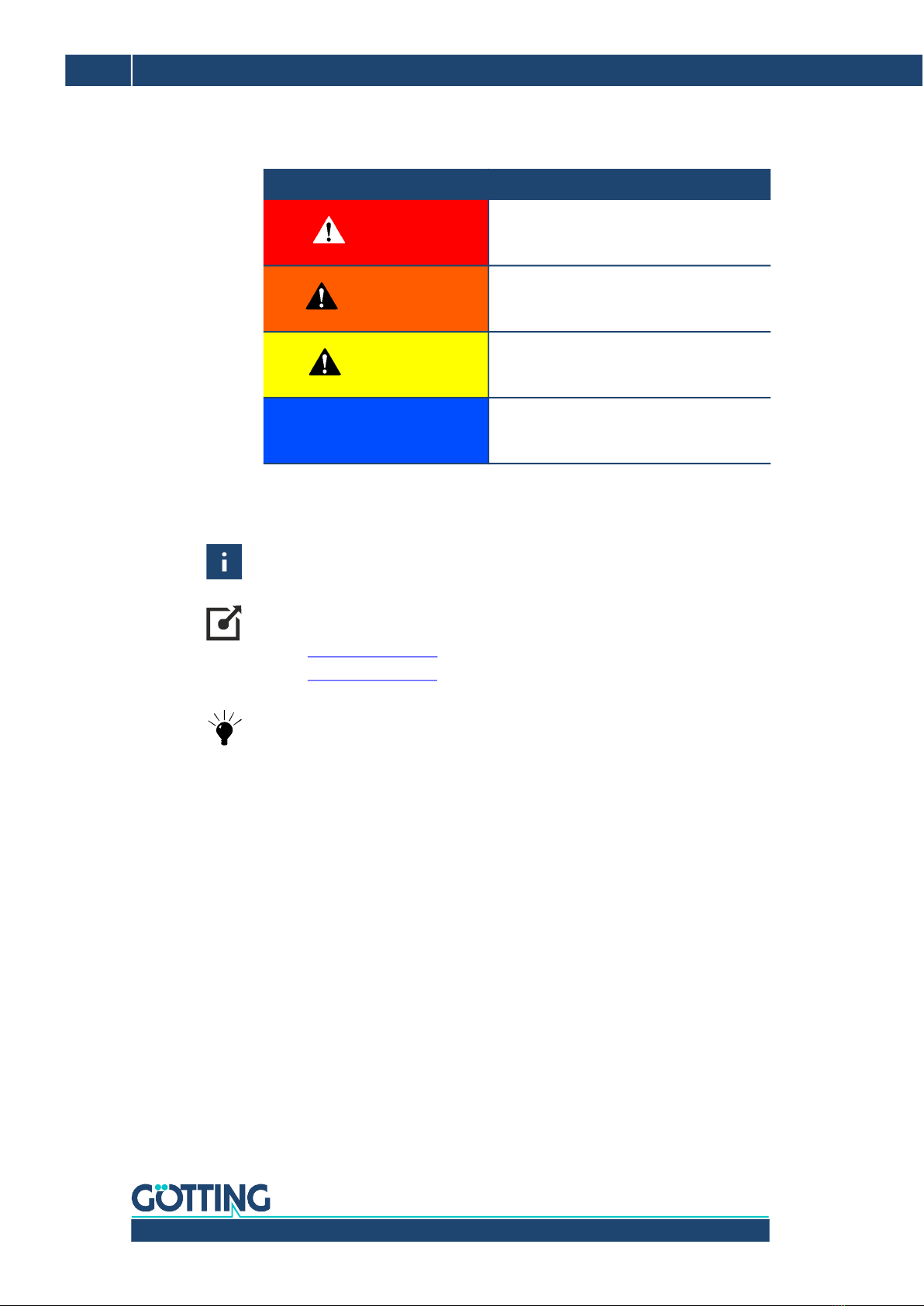
1.2 Presentation of Information .............................................................................................. 5
1.2.1 Warning Notices ............................................................................................................... 5
1.2.2 Symbols ............................................................................................................................... 6
2 Introduction....................................................................................... 7
2.1 Variants/Versions .................................................................................................................. 7
2.2 Range of Use .......................................................................................................................... 7
2.3 Qualification of the Users ................................................................................................... 8
2.4 Intended Use .......................................................................................................................... 8
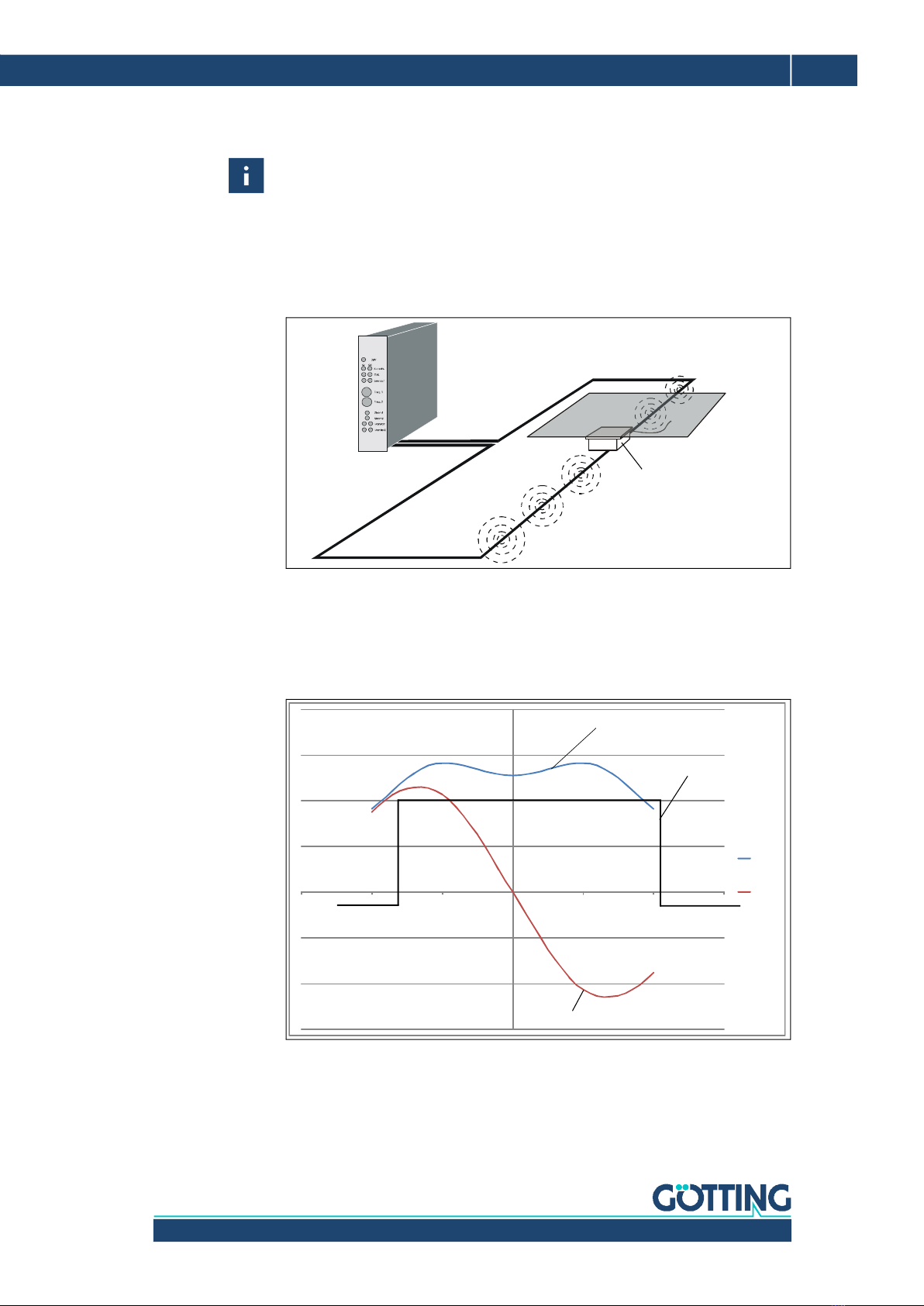
2.5 Functional Principle ............................................................................................................. 9
3 Mounting ......................................................................................... 11
3.1 Guide Wire ............................................................................................................................11
3.2 Energy Track.........................................................................................................................11
3.3 Inductive Guidance Sensor .............................................................................................. 11
3.3.1 Requirements ..................................................................................................................11
3.3.2 Mounting on the Vehicle ..............................................................................................11
3.3.3 Connection Cables (assembled on one side) / Terminating Resistors...........12
4 Commissioning ............................................................................... 14
5 Hardware ......................................................................................... 15
5.1 HG G-19370ZB/HG G-19380ZB (CAN Bus).................................................................15
5.1.1 LEDs....................................................................................................................................15
5.1.2 Pin Assignment ...............................................................................................................15
5.1.2.1 ST 1 ................................................................................................................................16
5.1.2.2 ST 2 / ST 3 (CAN 1 / CAN 2) ................................................................................... 16
5.2 HG G-19370YB/HG G-19380YB (Profinet) .................................................................. 17
5.2.1 LEDs....................................................................................................................................17
5.2.2 Pin Assignment ...............................................................................................................17
5.2.2.1 ST 1 ................................................................................................................................18
5.2.2.2 ST 2 / ST 3 (BUS 1 / BUS 2).................................................................................... 18
6 Configuration .................................................................................. 19
6.1 Turn-On Characteristic......................................................................................................19
6.2 Connection to a PC via the USB Interface ..................................................................19
6.3 Terminal Program ...............................................................................................................19
6.4 Service Program..................................................................................................................20
6.4.1 Main Menu........................................................................................................................20
6.4.1.1 HG G-19370/80ZB (CAN)......................................................................................... 20
6.4.1.2 HG G-19370/80YB (Profinet) ..................................................................................20
6.4.2 (1) Frequency Config .....................................................................................................21
6.4.3 (2) Calibration Config ....................................................................................................21
6.4.4 (3) Encoder Config .........................................................................................................22
6.4.5 (4) CSV ...............................................................................................................................23
6.4.6 HG G-19370ZB/HG G-19380ZB: (5) CAN Config .................................................. 24
6.4.7 Firmware Update ............................................................................................................24
7 CAN Bus Communication (HG G-19370ZB/HG G-19380ZB) ........ 26
7.1 Telegrams..............................................................................................................................26
7.2 Control and Status Telegrams ........................................................................................27
7.2.1 Incoming Telegram (IN) ................................................................................................ 27
7.2.2 Outgoing Telegram OUT1 ............................................................................................28