Device Description HG G-84300ZD | English, Revision 10 | Date: 01.06.2022
3
Table of Contents
1 About this Document....................................................................................5
1.1 Warning Notices..........................................................................................................................................5
1.2 Symbols...........................................................................................................................................................6
2 Introduction....................................................................................................7
3 Hardware ........................................................................................................8
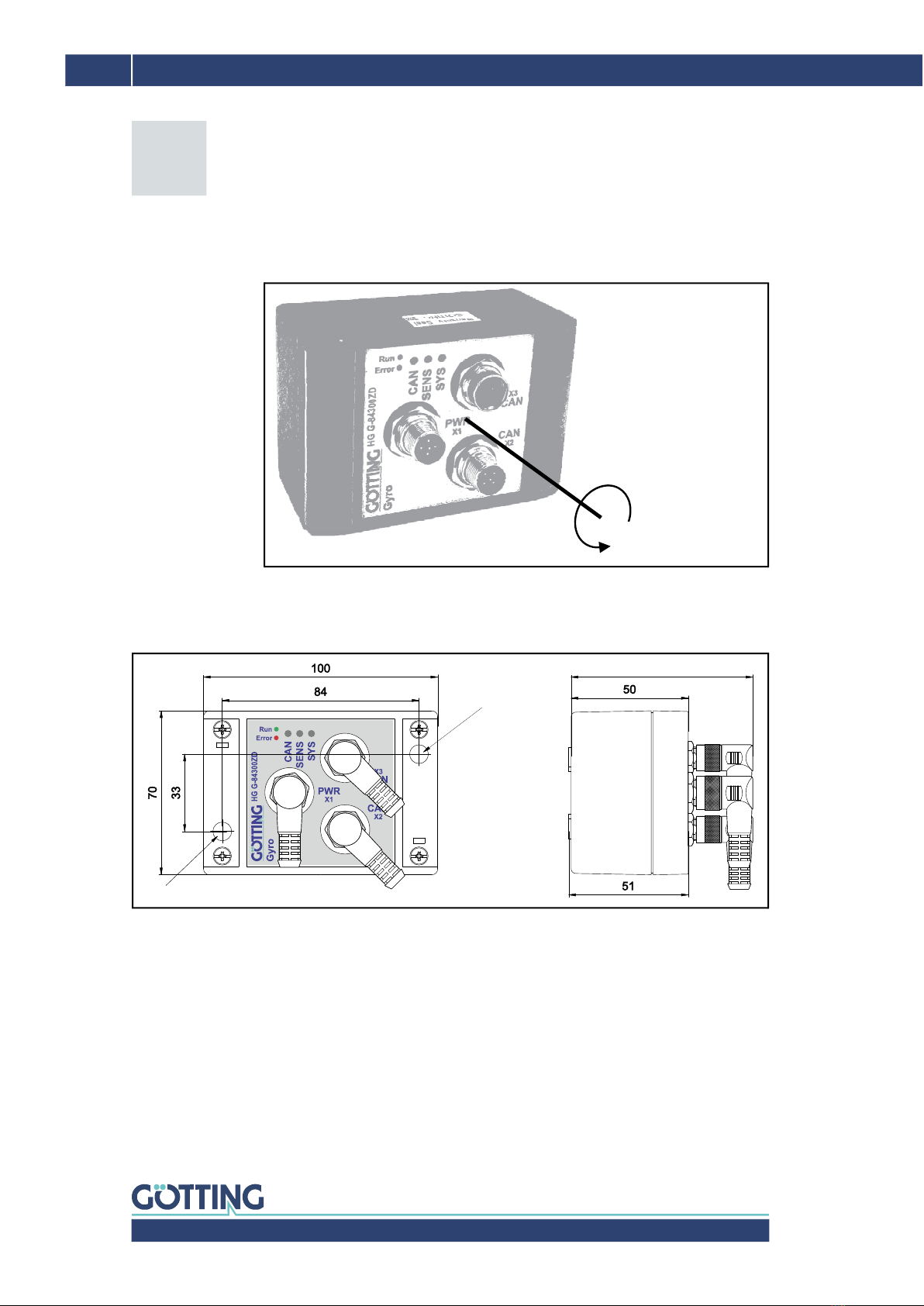
3.1 Alignment of the Measuring Axis........................................................................................................8
3.2 Dimensions....................................................................................................................................................8
3.3 Mounting ........................................................................................................................................................8
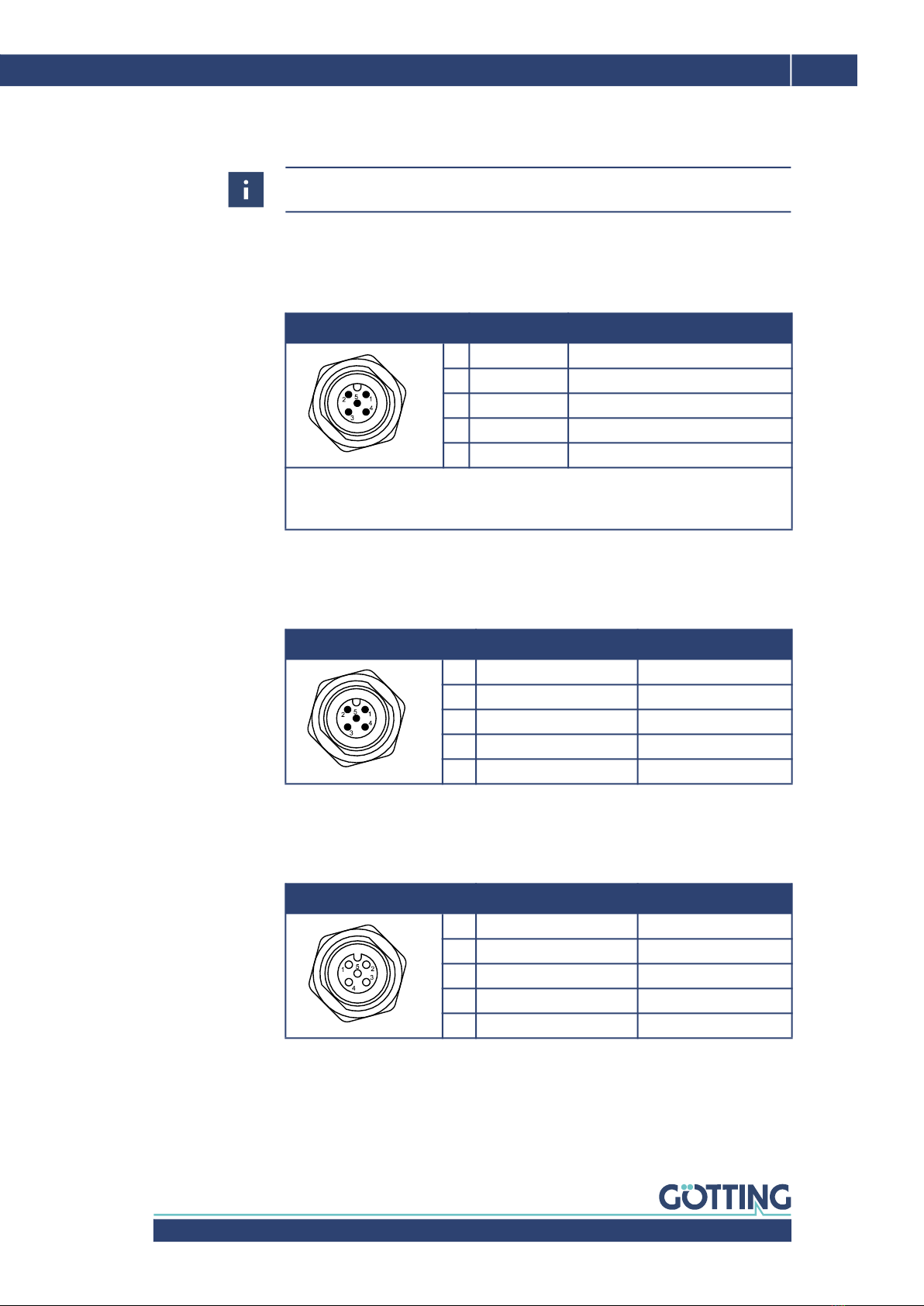
3.4 Pin Assignment............................................................................................................................................9
3.4.1 X1 (PWR/USB).........................................................................................................................................9
3.4.2 X2 (CAN) ....................................................................................................................................................9
3.4.3 X3 (CAN) ....................................................................................................................................................9
3.5 Switch-On Behavior ...............................................................................................................................10
3.6 LEDs...............................................................................................................................................................10
3.7 Error Messages.........................................................................................................................................11
4 Drift Compensation / Angle Reset............................................................12
4.1 Drift Compensation.................................................................................................................................12
4.2 Angle reset..................................................................................................................................................13
5 Configuration via USB ................................................................................14
5.1 USB Interface ............................................................................................................................................14
5.2 Terminal Program....................................................................................................................................15
5.3 Terminal Output In Monitor Mode ...................................................................................................15
5.3.1 Terminal Output for CAN Standard............................................................................................16
5.3.2 Terminal Output for CANopen® ..................................................................................................17
5.4 Logging (CSV)............................................................................................................................................18
5.5 Firmware Update.....................................................................................................................................18
6 CAN Bus Interface.......................................................................................20
6.1 Receiving Box............................................................................................................................................20
6.2 Transmitter Box........................................................................................................................................21
7 CANopen® Interface...................................................................................22
7.1 Description of the Process Data Objects (PDOs) ......................................................................22
7.1.1 Transmission Objects........................................................................................................................22
7.1.2 Reception Object ................................................................................................................................23
7.2 Heartbeat.....................................................................................................................................................23
7.3 Description of the Service Data Objects (SDOs) .......................................................................24
7.4 Object Directory .......................................................................................................................................24
7.4.1 Communication Specific Entries .................................................................................................24
7.4.2 Standardized Device Profile Range............................................................................................26
7.4.3 CANopen® Object Dictionary .......................................................................................................26
7.4.3.1 Device Type......................................................................................................................................26
7.4.3.2 Error Register...................................................................................................................................26
7.4.3.3 COB-ID SYNC message..............................................................................................................27
7.4.3.4 Device Name ...................................................................................................................................27
7.4.3.5 Hardware Version..........................................................................................................................27
7.4.3.6 Software Version ...........................................................................................................................27
7.4.3.7 Producer Heartbeat Time...........................................................................................................27
7.4.3.8 Identity Object.................................................................................................................................27
7.4.3.9 Receive PDO Parameter.............................................................................................................28
7.4.3.10 Mapping RPDO_1..........................................................................................................................28
7.4.3.11 Transmit PDO_1 Parameter .....................................................................................................28
Contents