3
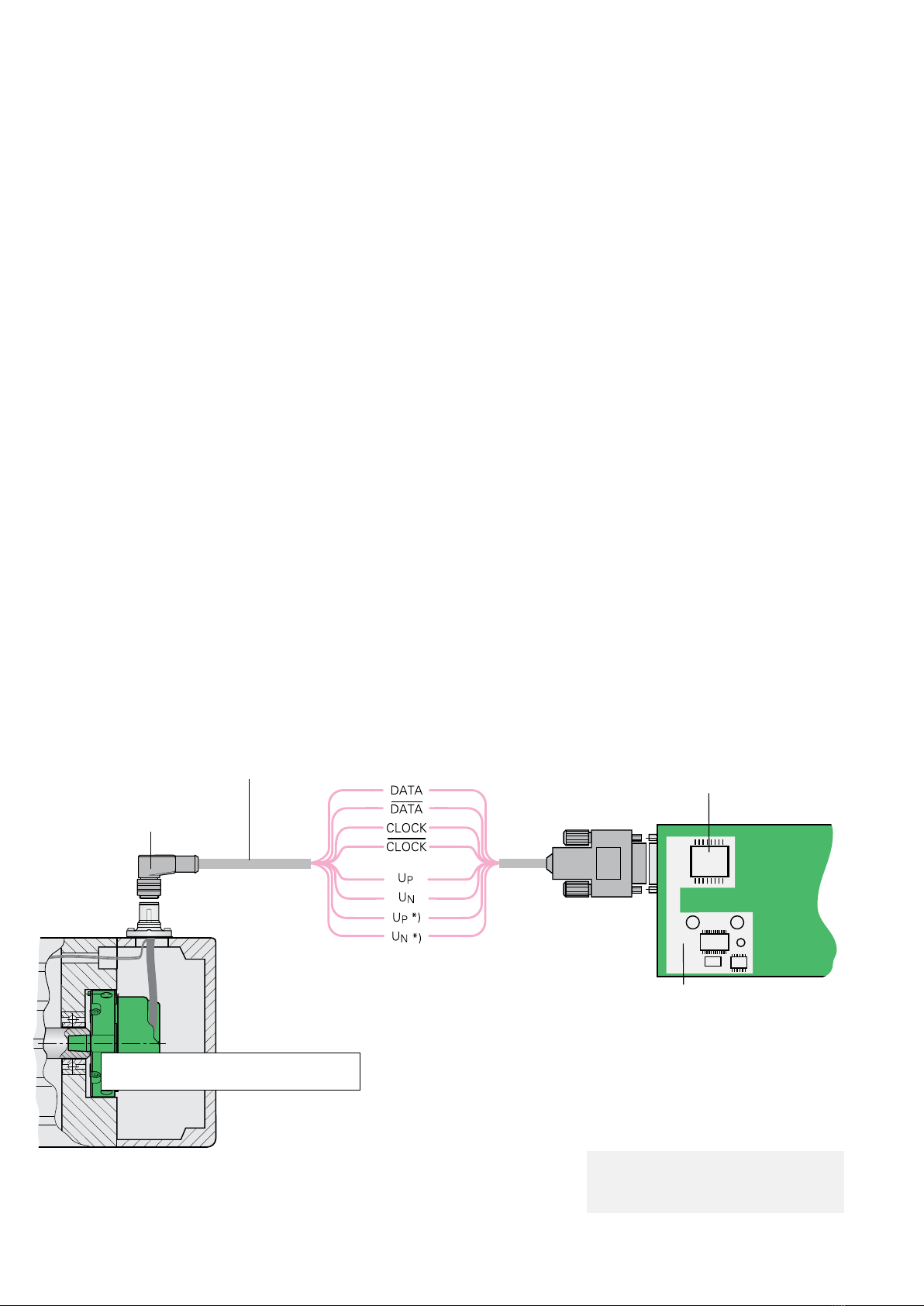
–The bidirectional interface
Interface EnDat serial bidirectional
Data transfer Position values, parameters and additional data
Data input Differential line receiver according to EIA standard RS 485 for
the signals CLOCK, CLOCK, DATA and DATA
Data output Differential line driver according to EIA standard RS 485 for
DATA and DATA signals
Position values Ascending during traverse in direction of arrow (see dimensions
of the encoders)
Incremental signals Depends on encoder
»1 VPP
, TTL, HTL (see the respective incremental signals)
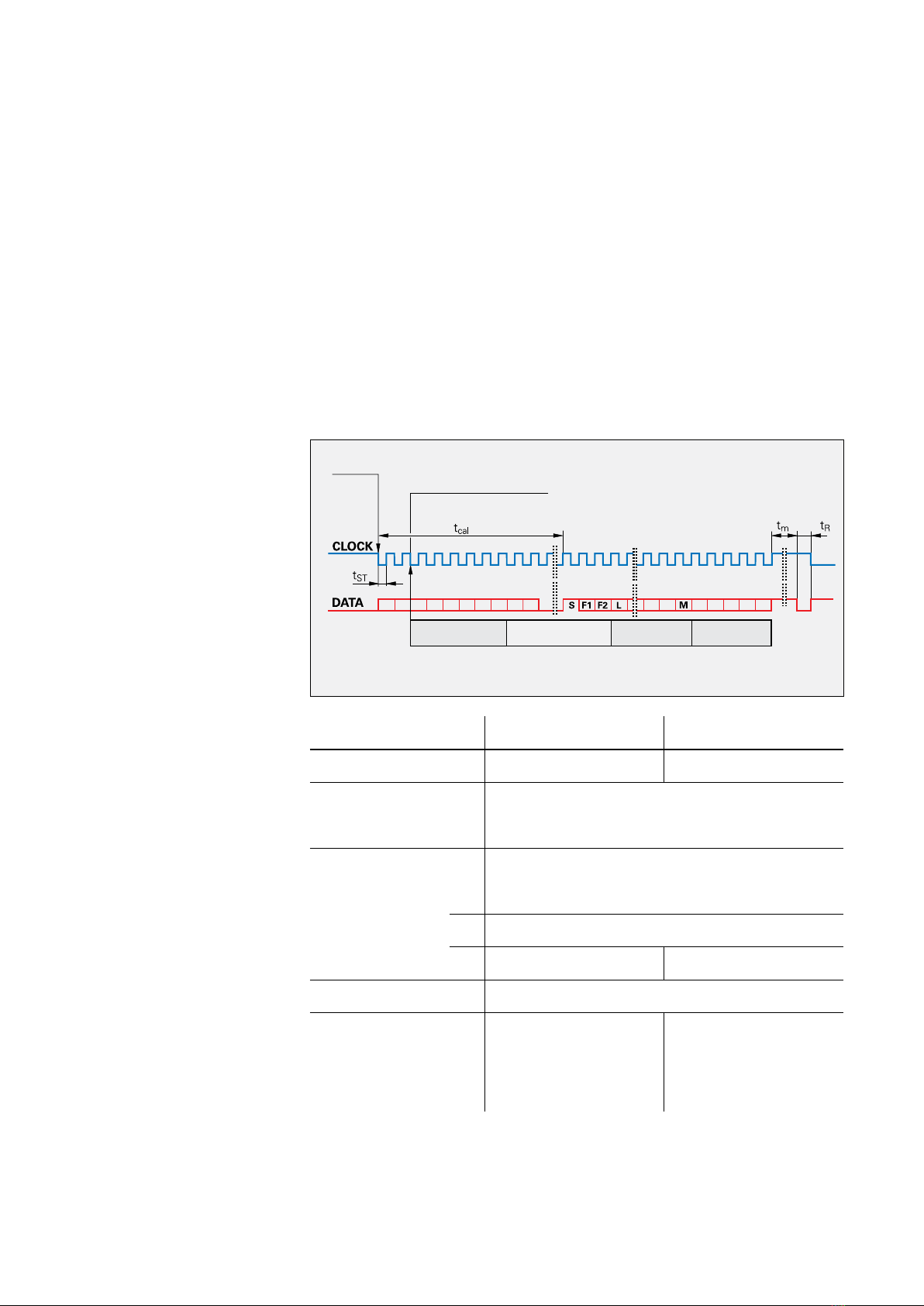
The EnDat interface is a digital,
bidirectional interface for encoders. It is
capable both of transmitting position
values as well as transmitting or updating
information stored in the encoder, or saving
new information. Thanks to the serial
transmission method, only four signal
lines are required. The data is transmitted
in synchronism with the clock signal from
the subsequent electronics. The type of
transmission (position values, parameters,
diagnostics, etc.) is selected through mode
commands that the subsequent electronics
send to the encoder. Some functions are
available only with EnDat 2.2 mode
commands.
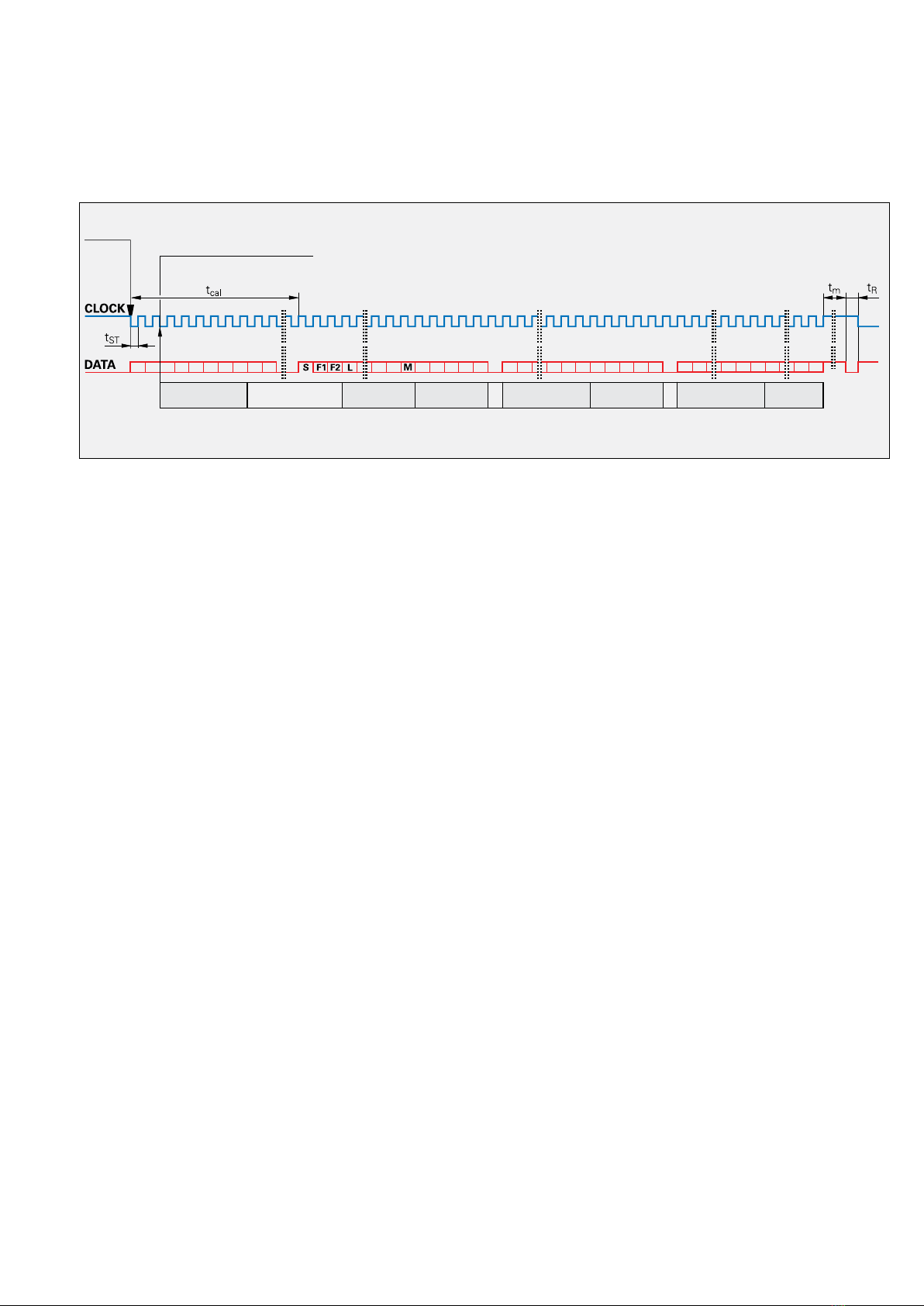
History and compatibility
The EnDat 2.1 interface available since the
mid-90s has since been upgraded to the
EnDat 2.2 version (recommended for new
applications). EnDat 2.2 is compatible in its
communication, command set and time
conditions with version 2.1, but also offers
significant advantages. It makes it possible,
for example, to transfer additional data (e.g.
sensor values, diagnostics, etc.) with the
position value without sending a separate
request for it. This permits support of
additional encoder types (e.g. with battery
buffer, incremental encoders, etc.). The
interface protocol was expanded and the
time conditions (clock frequency,
processing time, recovery time) were
optimized.
Supported encoder types
The following encoder types are currently
supported by the EnDat 2.2 interface (this
information can be read out from the
encoder’s memory area):
• Incremental linear encoder
• Absolute linear encoder
• Rotational incremental singleturn
encoder
• Rotational absolute singleturn encoder
• Multiturn rotary encoder
• Multiturn rotary encoder with battery
buffer
In some cases, parameters must be
interpreted differently for the various
encoder models (see EnDat Specifications)
or EnDat additional data must be
processed (e.g. incremental or battery-
buffered encoders).
Order designations
The order designations define the central
specifications and give information about:
• Typical voltage supply range
• Command set
• Availability of incremental signals
• Maximum clock frequency
The second character of the order
designation identifies the interface
generation. For encoders of the current
generation the order designation can be
read out from the encoder memory.
Incremental signals
Some encoders also provide incremental
signals. These are usually used to increase
the resolution of the position value, or to
serve a second subsequent electronics
unit. Current generations of encoders have
a high internal resolution, and therefore no
longer need to provide incremental signals.
The order designation indicates whether an
encoder outputs incremental signals:
• EnDat01 With 1 VPP incremental signals
• EnDatH With HTL incremental signals
• EnDatT With TTL incremental signals
• EnDat21 Without incremental signals
• EnDat02 With 1 VPP incremental signals
• EnDat22 Without incremental signals
Note on EnDat01/02:
The signal period is stored in the encoder
memory.
Voltage supply
The typical voltage supply of the encoders
depends on the interface:
EnDat01
EnDat21
5 V ± 0.25 V
EnDat02
EnDat22
3.6 V to 5.25 V or 14 V
EnDatH 10 V to 30 V
EnDatT 4.75 V to 30 V
Exceptions are documented in the
Specifications.
Command set
The command set describes the available
mode commands, which define the
exchange of information between the
encoder and the subsequent electronics.
The EnDat 2.2 command set includes all
EnDat 2.1 mode commands. In addition,
EnDat 2.2 permits further mode com-
mands for the selection of additional data,
and makes memory accesses possible
even in a closed control loop. When a
mode command from the EnDat 2.2
command set is transmitted to an encoder
that only supports the EnDat 2.1 command
set, an error message is generated. The
supported command set is stored in the
encoder’s memory area:
• EnDat01/21/H/T Command set 2.1
or 2.2
• EnDat02/22 Command set 2.2