12 2010-06/MU/OCT 3kG4 /001 / Ed. B 13
2010-06/MU/OCT 3kG4 /001 / Ed. B
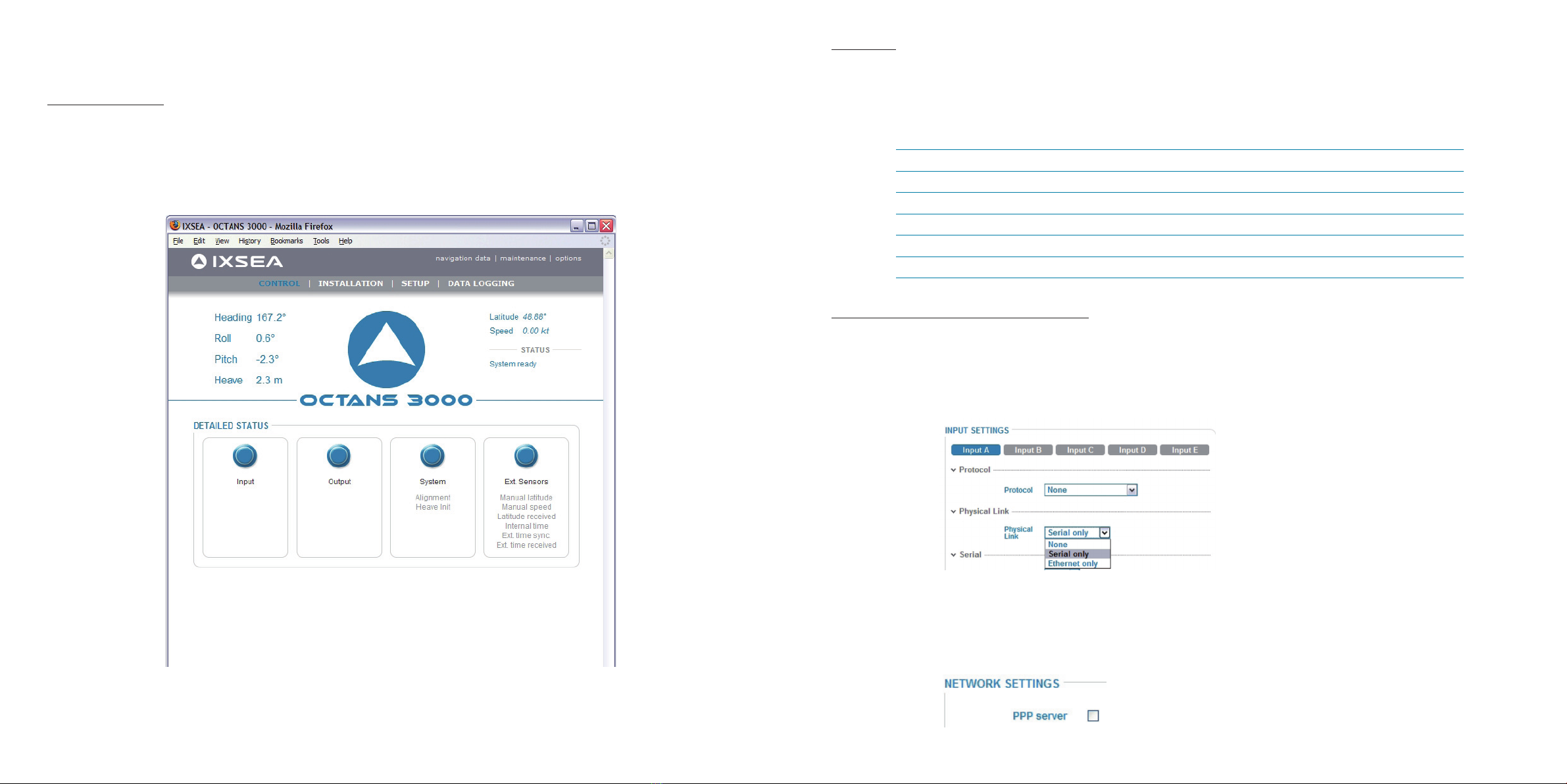
WEB-based User Interface - Menus and Options Overview
Find hereafter all the menus and options of the WEB-based User Interface and their uses
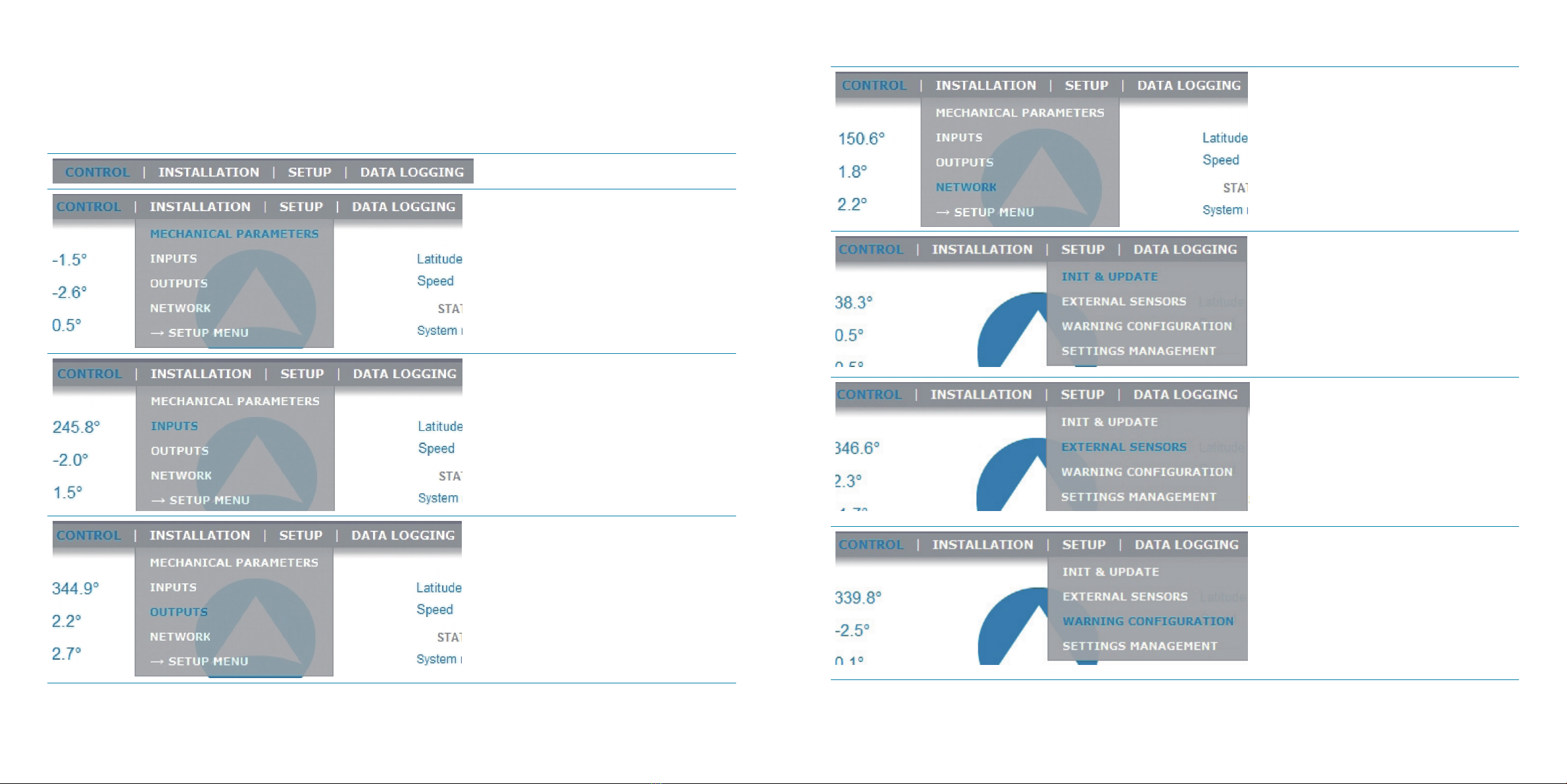
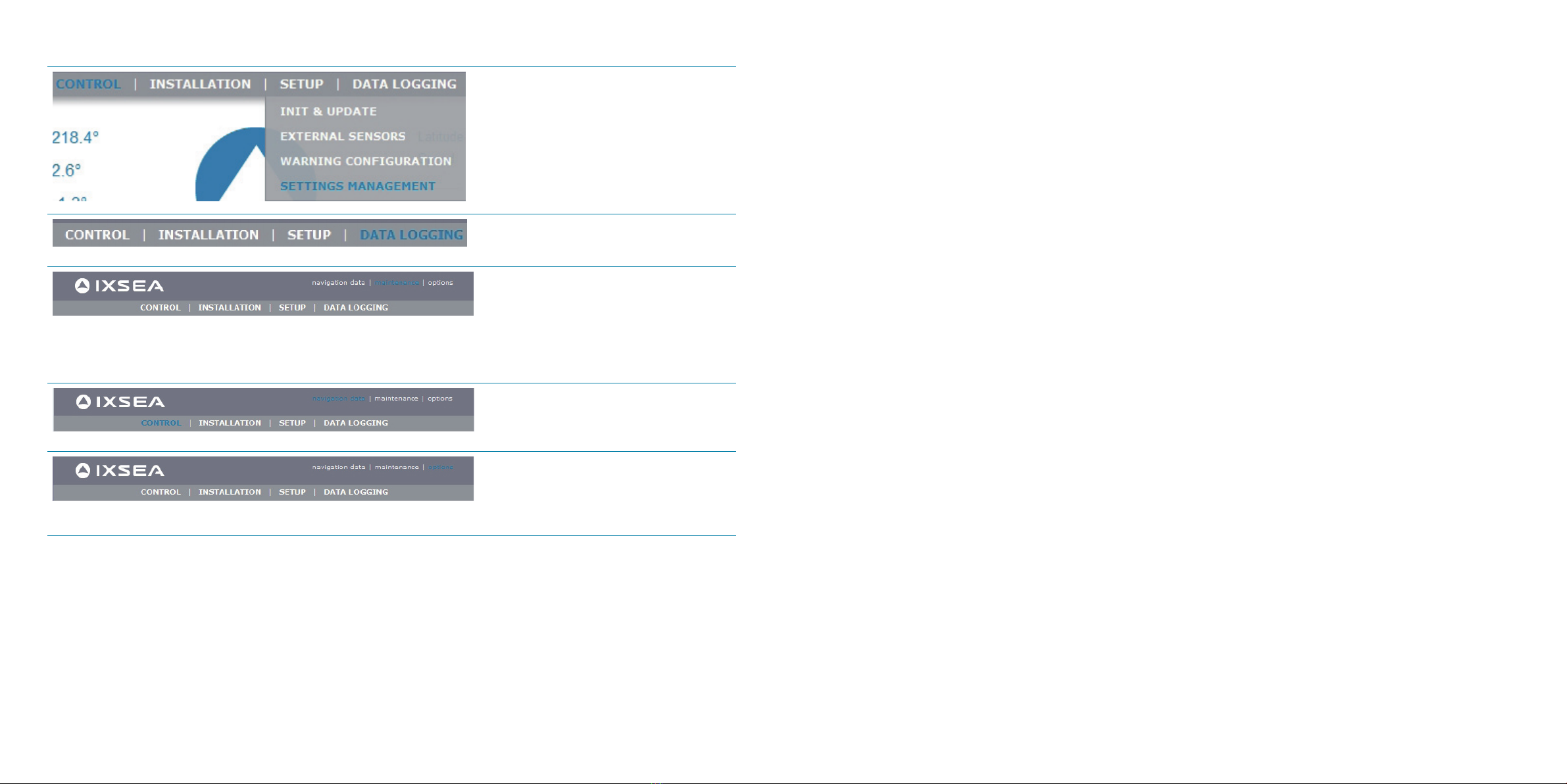
Menu /options Used to …
Define the OCTANS 3000 orientation, pos-
sible roll, pitch and heading misalign-
ments, primary and secondary lever arms
useful to compute the heave and position
for the output protocols that provide it
Define the inputs, the protocol used to
input the data, the serial (parity, baud rate,
standard (RS232 or RS422) and stop bit)or
Ethernet (transport layer, IP address, Port
number) parameters
Define the outputs, the protocol used to
output the data, the lever Arm to use, the
data rate or the input pulse to use to syn-
chronize the output data, the serial (parity,
baud rate, standard (RS232 or RS422) and
stop bit)or Ethernet (transport layer, IP ad-
dress, Port number) parameters, the pulse
output to output the envelop, the heave fil-
ter to use
Menu /options Used to …
Define the Network parameters for com-
munication through a serial ling (PPP op-
tion) or through Ethernet one (DHCP client
mode activation, OCTANS 3000 IP address
and Network mask to use
Enter the initial latitude and speed or to
update them
Define the parameters of
• The time synchronization (UTC); input
selection, pulse input selection for the PPS
signal, the protocol to use for the PPS si-
gnal
• The log: pulse input selection for the
speed synchronization signal, the protocol
to use for the synchronization signal, the
scale factor for the chosen protocol
To be informed in case of warning or error
for
• PPS synchronization loss
• Time synchronization loss
• External latitude synchronization loss
• External speed synchronization loss