JBF Environmental Technology
1
1 CHAPTER I - INTRODUCTION..........................................................................................3
A JBF DIP 500 SKIMMING SYSTEM .................................................................................3
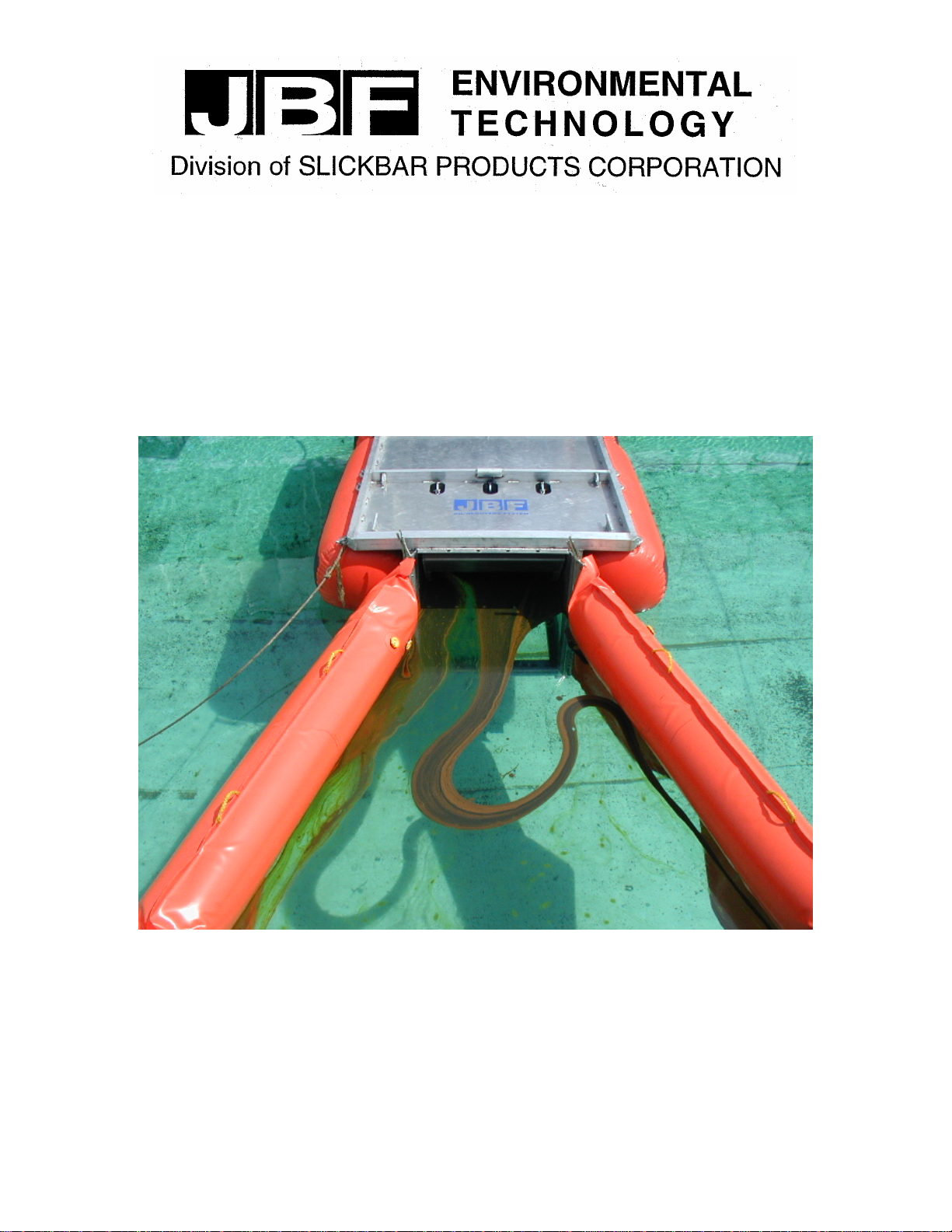
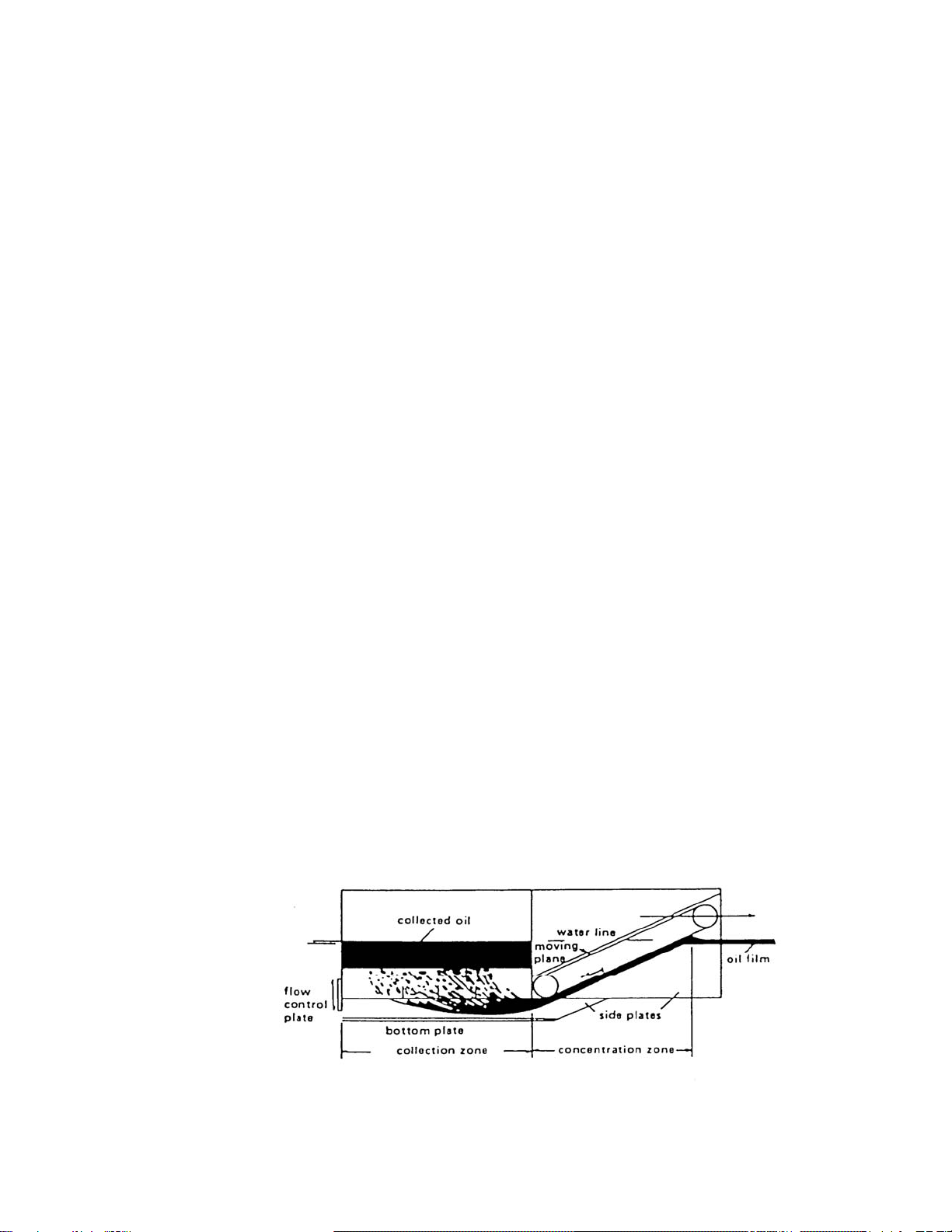
i) Explanation of the skimmer / DIP principle...................................................................3
ii) JBF DIP concept..........................................................................................................3
iii) IN-LINE ADVANCING SKIMMER-SWEEPING-FSB....................................................4
iv) SELECTION OF THE DIP 500.....................................................................................6
v) INTERFACE WITH PUMPS AND HYDRAULIC POWER UNITS.................................6
vi) OIL RECOVERY PERFORMANCE .............................................................................6
2 SYSTEM DESCRIPTION AND CHARACTERISTICS........................................................7
A GENERAL DESCRIPTION..............................................................................................7
B OPERATING CONCEPT AND LIMITS............................................................................9
i) Transportation & Storage:............................................................................................9
ii) Deployment time & Configurations:..............................................................................9
iii) Oil Recovery: ...............................................................................................................9
iv) Speed limitations:.........................................................................................................9
v) Sea state limitations...................................................................................................10
vi) Debris handling..........................................................................................................10
C MAJOR COMPONENTS ...............................................................................................10
i) Moving plane assembly..............................................................................................10
ii) Belt Motor...................................................................................................................11
iii) Collection Well...........................................................................................................11
iv) Oil Transfer Pumps....................................................................................................11
v) Pontoons....................................................................................................................11
vi) Control Stand.............................................................................................................11
vii) Transition booms .......................................................................................................12
viii) Debris Rakes .............................................................................................................12
ix) Belt Wiper ..................................................................................................................12
D COMPONENT DESCRIPTION AND CHARACTERISTICS...........................................12
i) The Hand winch.........................................................................................................12
ii) DOP 250 pump..........................................................................................................13
3 STORAGE AND TRANSPORT ........................................................................................13
A Storage..........................................................................................................................13
B Transportation ...............................................................................................................13
4 ASSEMBLY AND DEPLOYMENT....................................................................................13
A DIP 500 ASSEMBLY .....................................................................................................13
i) Assemble DIP 500 Unit..............................................................................................13
ii) Assemble Outrigger Arm............................................................................................15
iii) Deployment of DIP 500 .............................................................................................15
5 SKIMMING OPERATIONS...............................................................................................16
A PREPARATIONS FOR SKIMMING...............................................................................16
i) Operation...................................................................................................................16
ii) Connect applicable boom system and rigging............................................................17
iii) Hydraulic control stand ..............................................................................................17
B OPERATION OF MOVING PLAN ASSEMBLY ............................................................18
i) Running the belt.........................................................................................................18
ii) If the DIP belt becomes jammed or stops running. ....................................................18