DGPS224(JLR-4341)
10/20
SECTION 6 SPECIFICATIONS
・Sensor Type :Multichannel 12ch+SBAS 1ch
・Maximum Number of
Tracked Satellites :12 Satellites
・Accuracy :13m 2DRMS (HDOP≦4 SA off)
5m 2DRMS (Beacon DGPS)
7m 2DRMS (SBAS)
・SBAS :WAAS, MSAS, EGNOS
・Geodetic Datum :Selection among 46 geodetic datum (Default:WGS-84)
・Data input :Initial input, SBAS Setting input, Beacon Setting input
・Data output :Selection among NMEA0183, IEC61162-1
Selection among NMEA0183 Version 1.5, 2.1, 2.3 (Default:Version 1.5)
NMEA0183 Version 1.5:GGA,RMC,GLL,VTG
NMEA0183 Version 2.1:GGA,VTG,RMC,GLL,GSV,GSA,DTM,MSS
NMEA0183 Version 2.3:GGA,VTG,RMC,ZDA,GSV,GSA,DTM,MSS,GLL,
GBS,GRS,GST,GNS
IEC61162-1 :GGA,VTG,RMC,ZDA,GSV,GSA,DTM,MSS,GLL,
GBS,GRS,GST,GNS
・Reception Beacon Frequency :283.5~325kHz
・Selection of Beacon Station :Automatic or manual
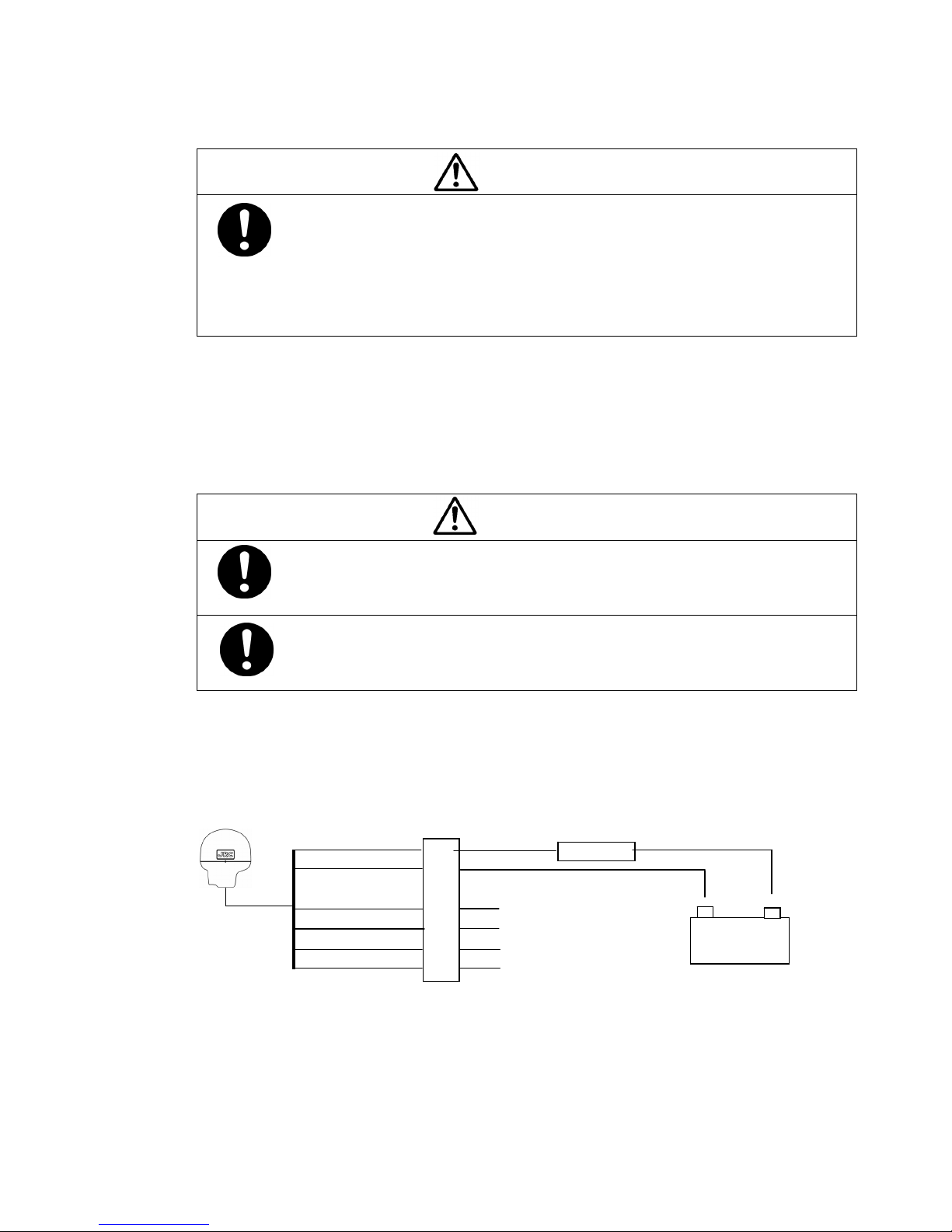
・Power Supply Voltage :DC12/24V(+30%,-10%)
・Power Consumption :less than 2.5W
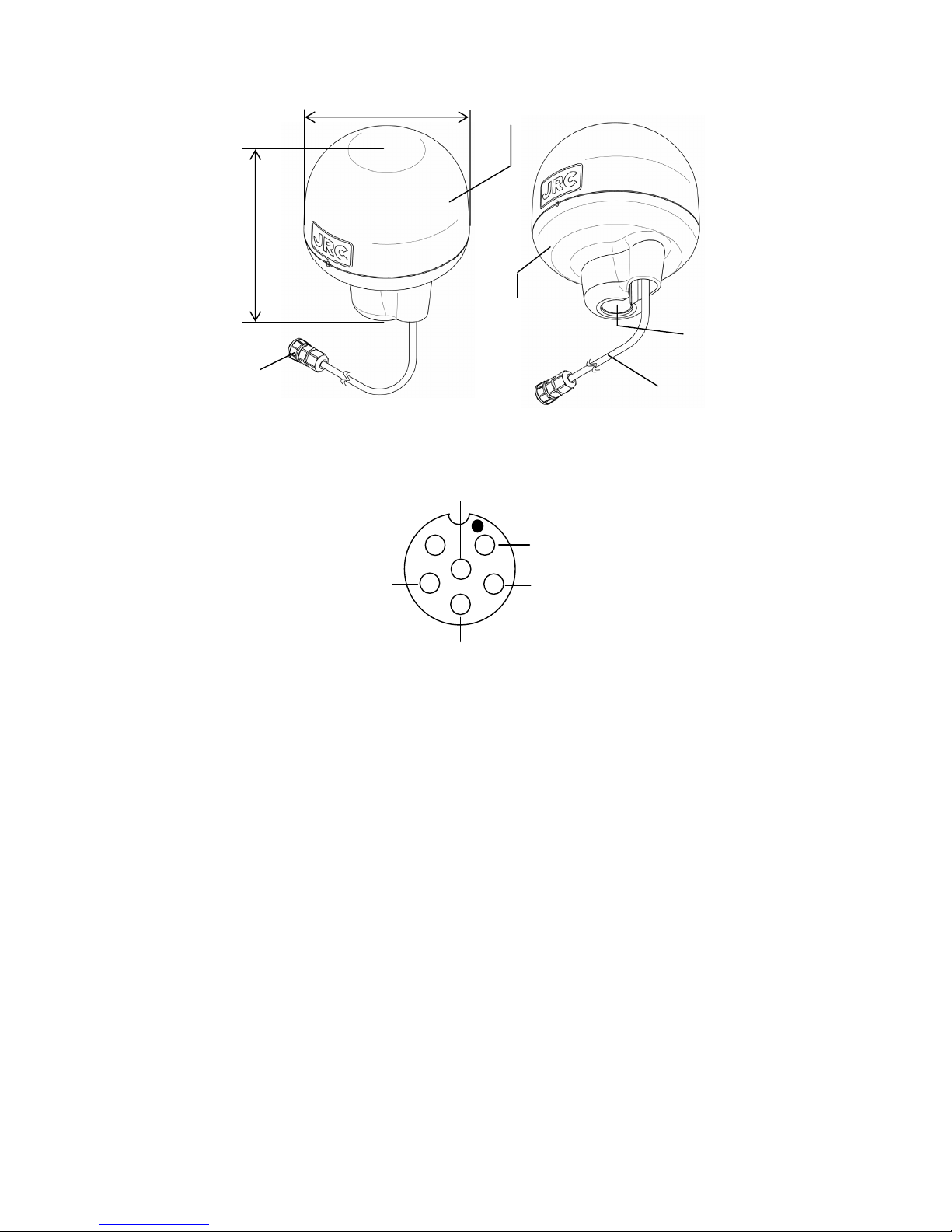
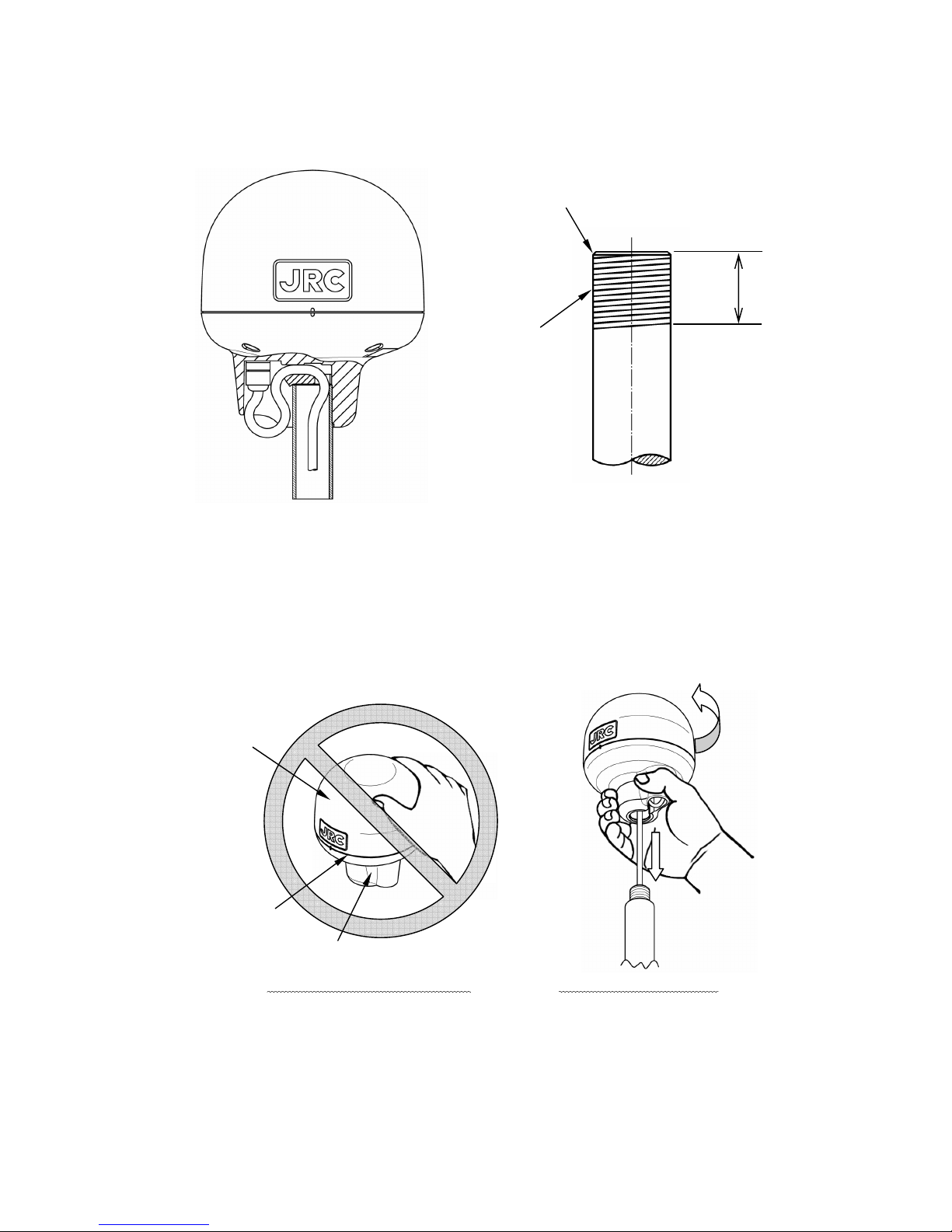
・Dimension :φ134m×155Hmm
・Mass :Approximately 1.7Kg
・Operation Temperature :-25℃~+55℃
・Storage Temperature :-25℃~+70℃
・Vibration :IEC60945 ed.4 conformant
・EMC :IEC60945 ed.4 comformant
・Waterproof :IP56
When the Lithium battery runs out, the settings are restored to the default values. In addition, it will take
about a minute for position fix. The battery life expires in about 10 years under the normal use
condition, but it may differ depending on the environment or use conditions.
PLACE OF CONTACT
TOKYO OFFICE
SEATTLE BRANCH OFFICE
AMSTERDAM BRANCH OFFICE
Nittochi Nishi-Shinjuku bldg.
10-1, Nishi-Shinjuku 6-chome, Shinjuku-ku,
Tokyo 160-8328 JAPAN
Phone : +81-3-3348-4126
Fax : +81-3-3348-4183
Web : http://www.jrc.co.jp
1021 SW Klickitat Way, Bldg. D,
Suite 101, SEATTLE, WA98134 USA
Phone : +1 (206) 654-5644
Fax : +1 (206) 654-7030
Web : http://www.jrcamerica.com
Cessnalaan 40-42 1119NL Schiphol-Rijk
THE NETHERLANDS
Phone : +31-(0) 20-658-0750
Fax : +31-(0) 20-658-0755
Web : http://www.jrceurope.com/