-8-
Ɣ5HPRWHFRQWUROOHUSUHSDUDWLRQ
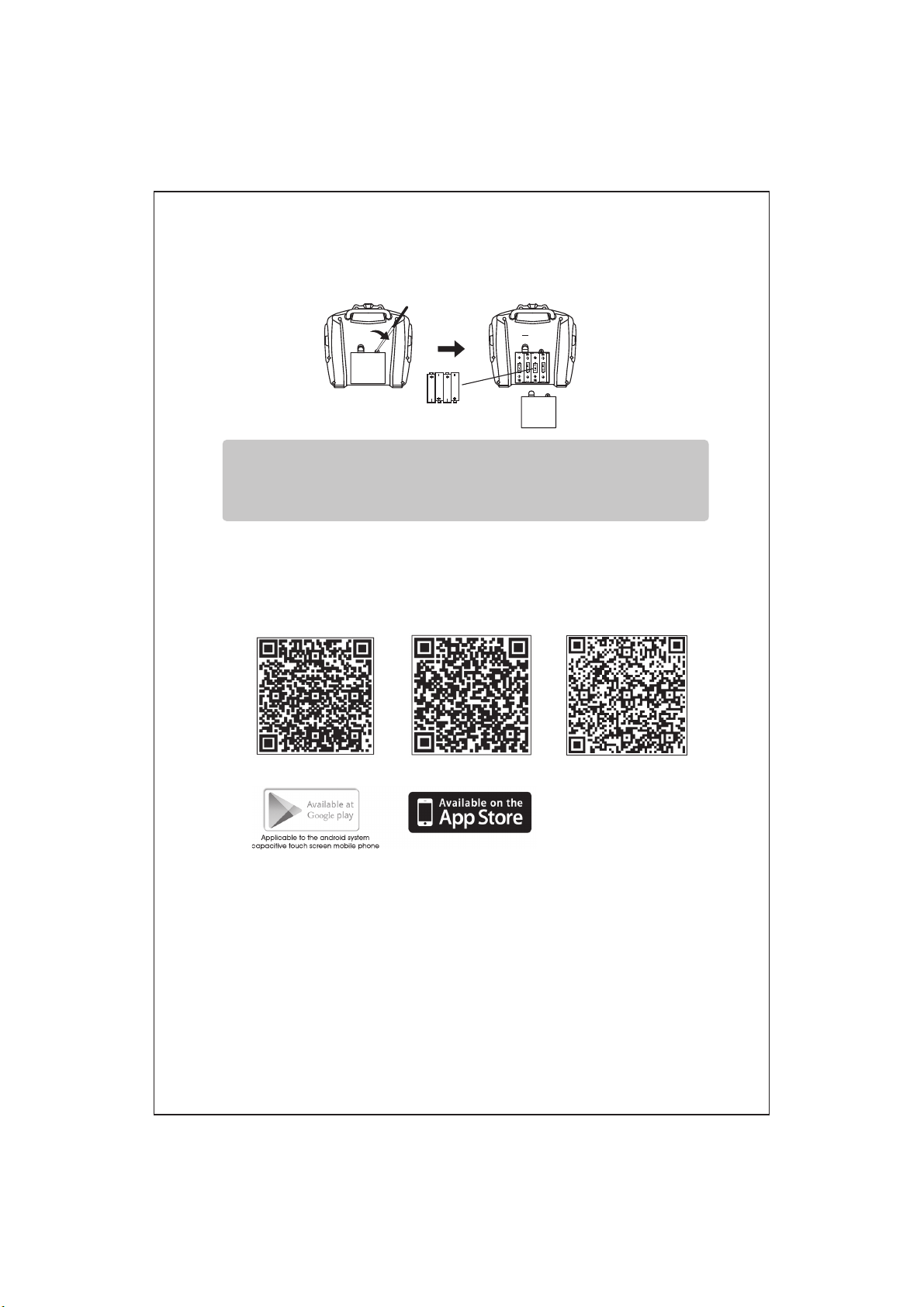
1.Take out the battery cover on the back of the controller.
2.Insert 4*1.5V AA battery then put on the battery cover.
Remote controller low power indicator:When the remote controller under low power
status,the light on the remote controller change from constantly in to flicker,and the
buzzer on the remote controller make the alarm sound "DI DI" continuously.
6RIWZDUHLQVWDOODWLRQ
Ɣ6PDUWSKRQHSDGWDEOHWKDUGZDUHVRIWZDUHLQVWDOODWLRQ
Two-dimension code is provided on color box packing and back cover of
specification to scan.
Connection instruction:
1.Turn on the drone, the FPV indicate light blink slowly, which shows the
drone is ready to connect with phone.
2.Open your phone and into “settings” , turn on the WIFI, search the KD-
**** from the signal list, connect the signal, exit “setting” option until the
signal shows connected.
3.Open the PANTONMA APP, click “MY DRONE” into control interface. The
indicate light on the drone will on, which means is connected.The phone
shows the real time image. The wifi signal in full grid showing the
strongest signal.
QR code for google play QR code for IOS QR code for 360