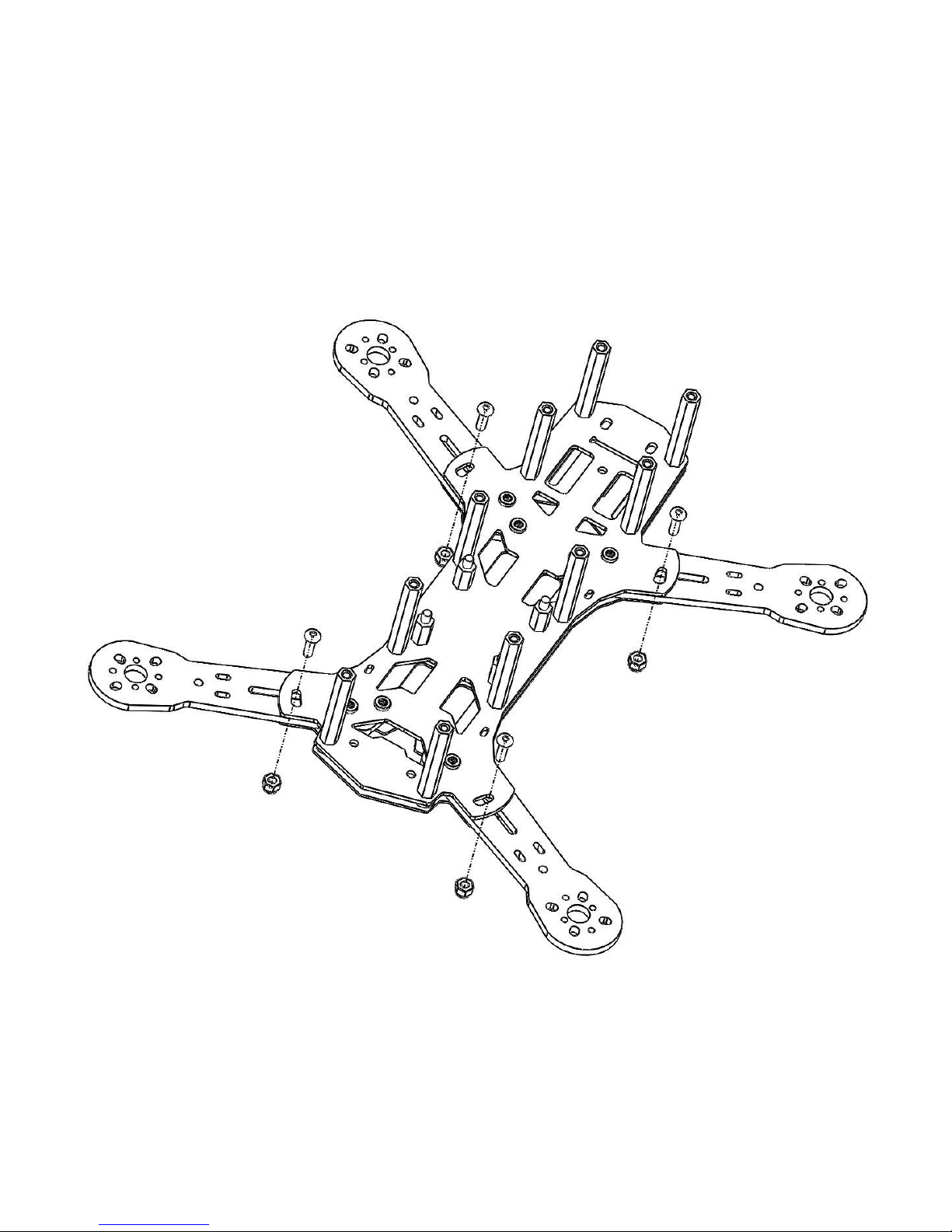
Center Plate with onboard RROSD engine (x1)
Bottom Plate (x1)
Top Plate (x1)
Arms (x4)
HD Plate (x1)
CCD Board Camera mount (x1)
Aluminum M3 x 6mm (x10) (top plate)
Aluminum M3 x 8mm (x4) (arm pivot)
Aluminum M3 x 10mm (x4) (arm slot)
Aluminum M3 x 16mm (x10) (lower plates)
Nylon M3 x 3mm Spacer (x14) (lower plates)
Nylon M3 x 12mm (x4) (flight controller)
Nylon M3 hex nut (x4) (flight controller)
Nylon 35mm F/F Standoff (x10) (center frame)
Nylon 10mm M/F Standoff (x4) (flight controller)
Nylon M3 washer (x4) (arm pivot)
Rubber Soft Bobbin (x3) (HD plate)
Captive nut (x8) (RROSD plate)
M3 Nylon locking nut (x4) (arm slot)
*Don’t be alarm if you see extra hardware, those are included as spares
If you find anything missing please contact your retailer or email SUPPORT@REDROTOR.COM immediately.
M3 Allen/hex key/driver *size #2
M3 Hex socket driver
Soldering Iron with a thick tip
60/40 Rosin core solder or varying thickness
Shrink Tubing of various diameters
(Optional but recommended) Zip ties of varying sizes
(Optional but recommended) Battery Strap (Scorpion or other branded Straps)
(Optional but recommended) Wire Mesh Braid or Paracord