Id.-Nr.: 1400.210B.0-01 ▪Stand: 04/2018
Content
General information................................................................................................................................................................5
Notes and symbols.......................................................................................................................................................5
Address letters.............................................................................................................................................................5
Axis numbers...............................................................................................................................................................5
Axis code word (AKW)..................................................................................................................................................6
Components of a NC program.................................................................................................................................................7
M Functions.............................................................................................................................................................................8
G Functions .............................................................................................................................................................................9
General explanations....................................................................................................................................................9
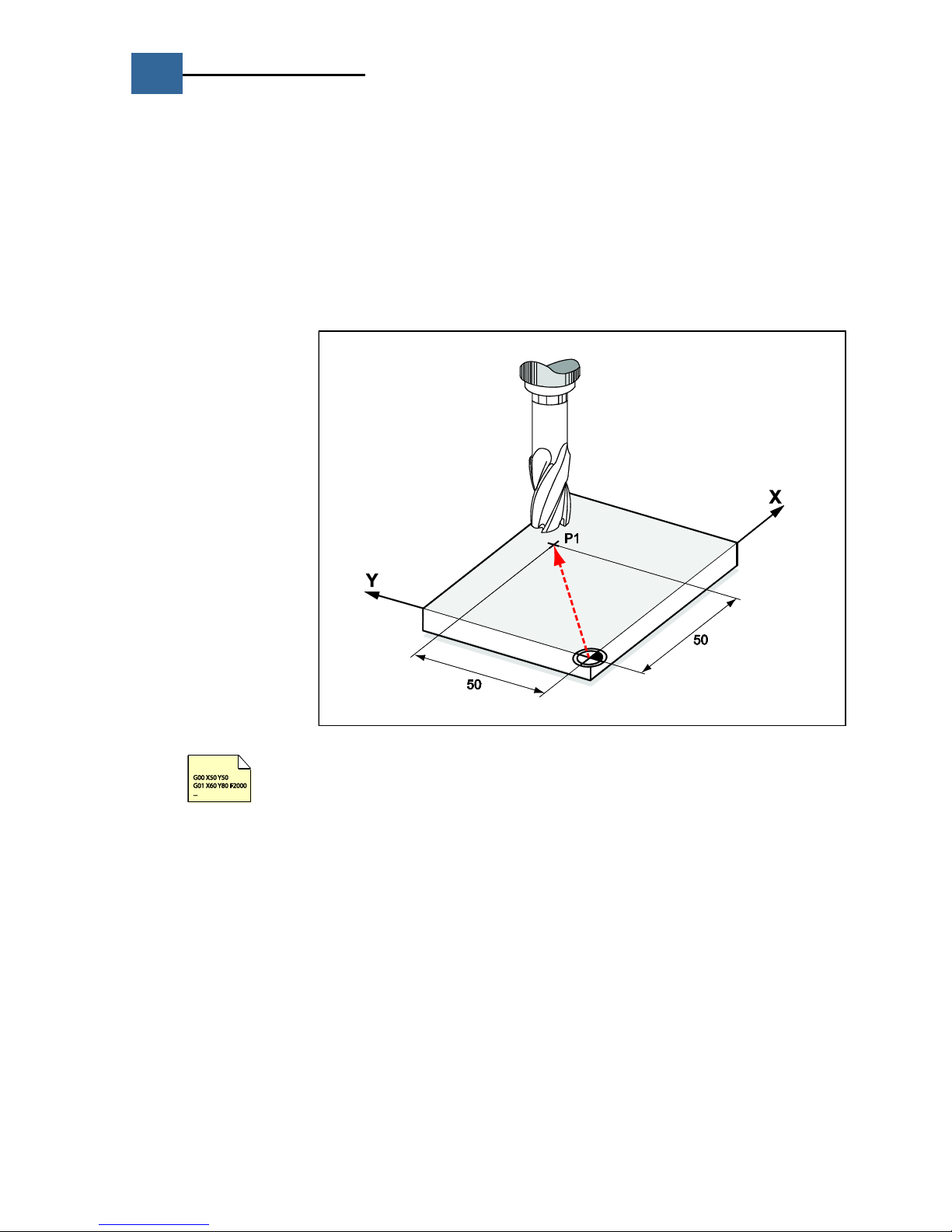
G00 Positioning in rapid traverse................................................................................................................................. 10
G01 Positioning at the feed rate.................................................................................................................................. 11
G02 Circular interpolation - Clockwise.......................................................................................................................... 12
G03 Circular interpolation - Counterclockwise............................................................................................................... 12
G04 Dwell time .......................................................................................................................................................... 13
G05 Spatial arc interpolation ....................................................................................................................................... 14
G14 Macro call ........................................................................................................................................................... 15
G17 Plane XY............................................................................................................................................................. 16
G18 Plane ZX............................................................................................................................................................. 16
G19 Plane YZ............................................................................................................................................................. 16
G22 Sub program call................................................................................................................................................. 17
G23 Text - Functions.................................................................................................................................................. 18
G25 RTCP.................................................................................................................................................................. 19
G26 Free plane .......................................................................................................................................................... 22
G27 Tool zero point.................................................................................................................................................... 24
G30 Spline interface (online spline) ............................................................................................................................. 26
G40 Deletion of the milling cutter radius correction ...................................................................................................... 27
G41 Milling cutter radius correction left ....................................................................................................................... 27
G42 Milling cutter radius correction right ..................................................................................................................... 28
G43 Milling cutter radius correction up to..................................................................................................................... 29
G44 Milling cutter radius correction via........................................................................................................................ 30
Zero offsets and coordinate rotation............................................................................................................................ 31
G53 Deletion of the zero offset ................................................................................................................................... 32
G70 Units of measurement inch .................................................................................................................................. 33
G71 Units of measurement mm................................................................................................................................... 33
G72 Deletion of mirror image machining and scaling .................................................................................................... 33
G73 Mirror image machining....................................................................................................................................... 34
G73 Scaling ............................................................................................................................................................... 35
G79 Cycle execution................................................................................................................................................... 36
G90 Absolute measure ............................................................................................................................................... 37
G91 Relative measure ................................................................................................................................................ 38
G92 Relative zero point offset coordinate rotation ........................................................................................................ 39
G93 Absolute zero point offset coordinate rotation ....................................................................................................... 40
G94 Speed programming............................................................................................................................................ 42
G95 Time programming.............................................................................................................................................. 43
G107 Eroding: Define the directional vector for the lift-off movement............................................................................ 44
G181 Probe calibration ............................................................................................................................................... 45
G190 Absolute circle center ........................................................................................................................................ 46
G191 Relative circle center ......................................................................................................................................... 47
G288 Set Look Ahead parameters ............................................................................................................................... 48
G288,0 Look Ahead basic parameter................................................................................................................... 48
G488 Simple measurement block ................................................................................................................................ 49
G488,1 Simple measurement block ............................................................................................................................. 53
G581 Continuous operation cycle rotation.................................................................................................................... 54
G781,1 Spindle offset ................................................................................................................................................. 55
G783,0 Read/Write zero points ................................................................................................................................... 56
G1000 Eroding: Velocity ............................................................................................................................................. 57
G1001 Eroding: Directions .......................................................................................................................................... 58
G1002 Eroding: Factors and modes............................................................................................................................. 59
G1003 Eroding: Time data.......................................................................................................................................... 60
G1004 Eroding: Orbital movement in the selected plane............................................................................................... 61