2
Temposonics® R-Series SSI
Operation Manual
Temposonics® R-Series SSI
Operation Manual
Table of contents
1. Introduction.......................................................................................................................................................3
1.1 Purpose and use of this manual....................................................................................................................................................................3
1.2 Used symbols and warnings .........................................................................................................................................................................3
2. Safety instructions...............................................................................................................................................3
2.1 Intended use..................................................................................................................................................................................................3
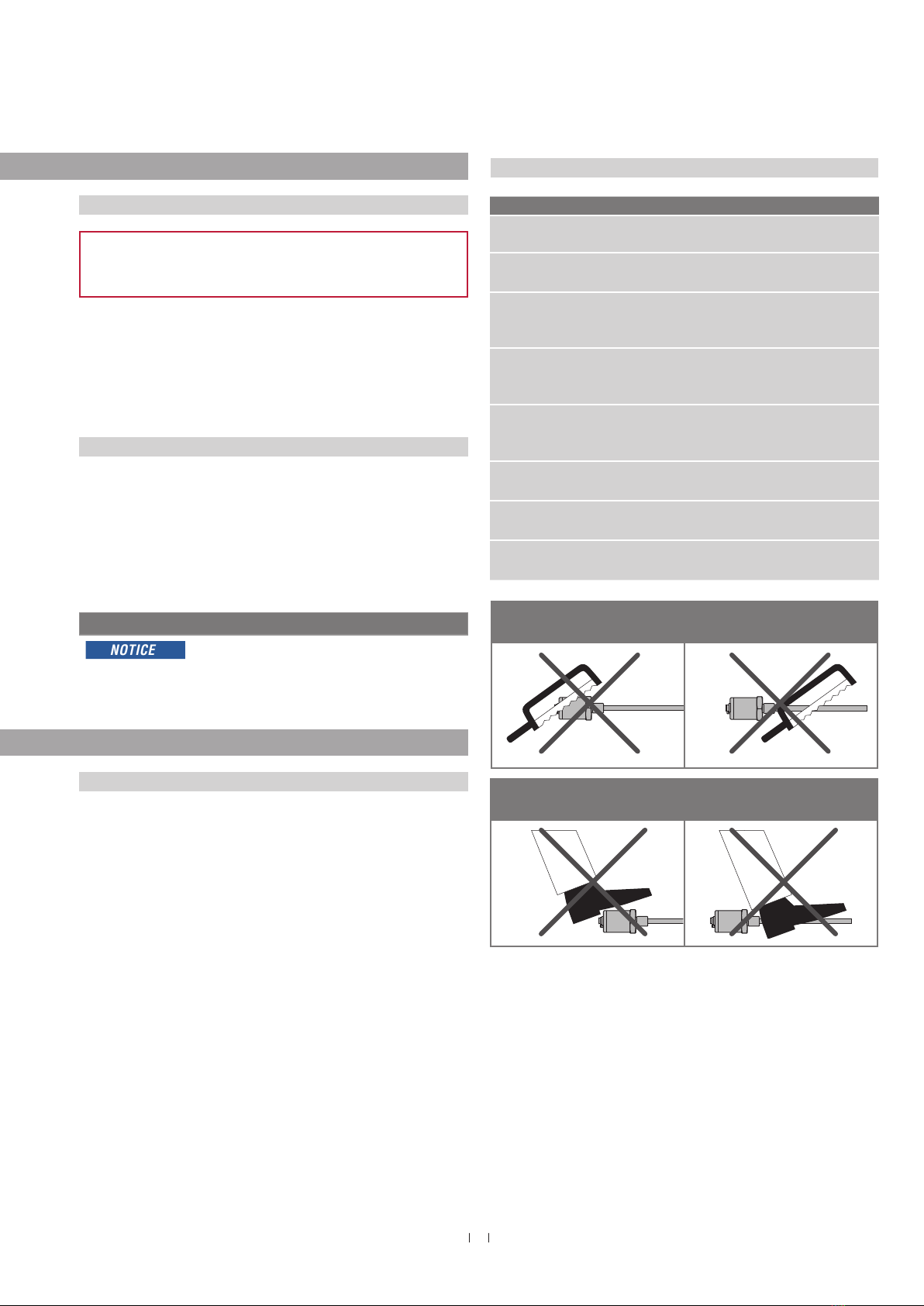
2.2 Forseeable misuse.........................................................................................................................................................................................3
2.3 Installation, commissioning and operation....................................................................................................................................................4
2.4 Safety instructions for use in explosion-hazardous areas .............................................................................................................................4
2.5 Warranty........................................................................................................................................................................................................4
2.6 Return ...........................................................................................................................................................................................................4
3. Identification......................................................................................................................................................5
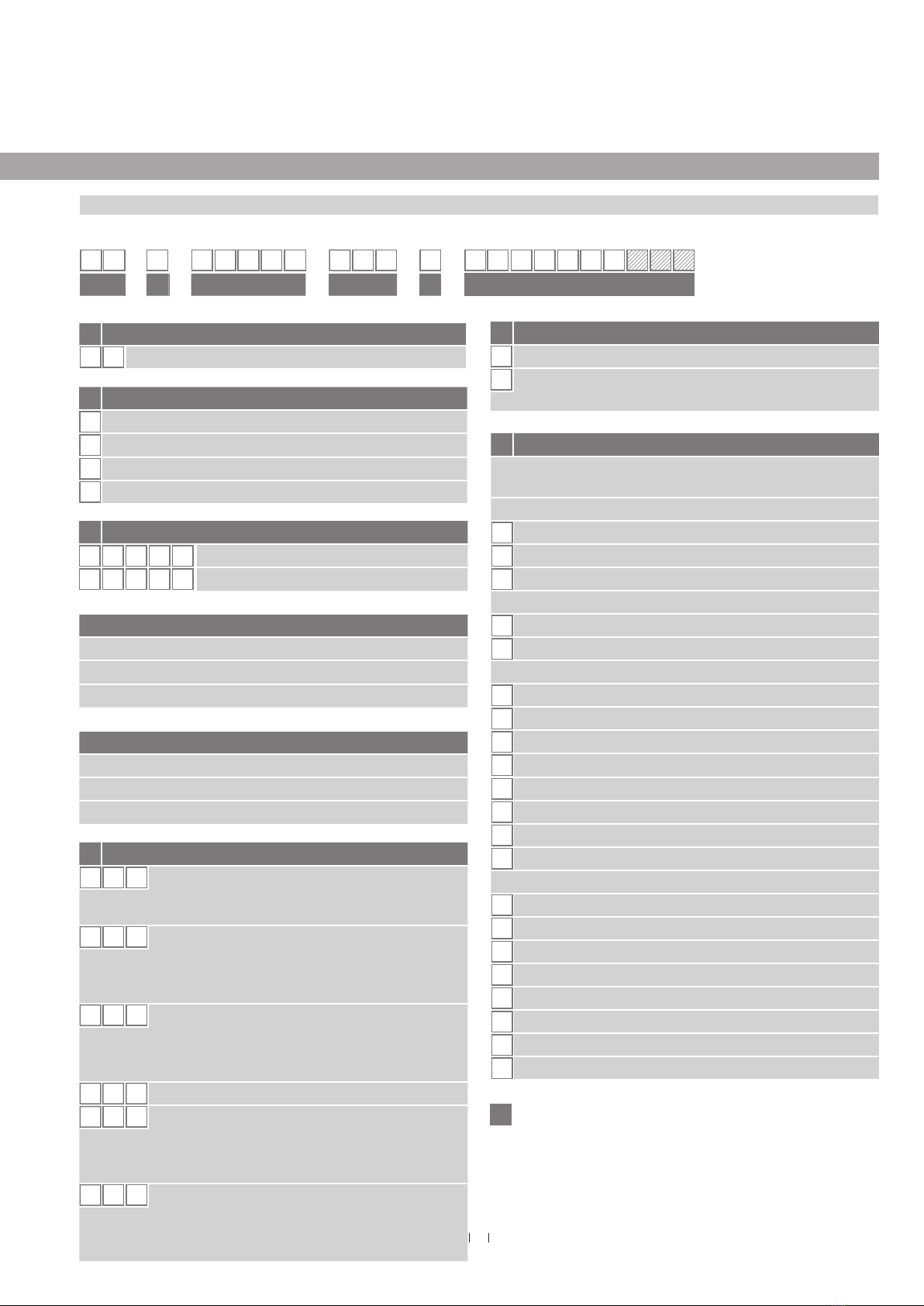
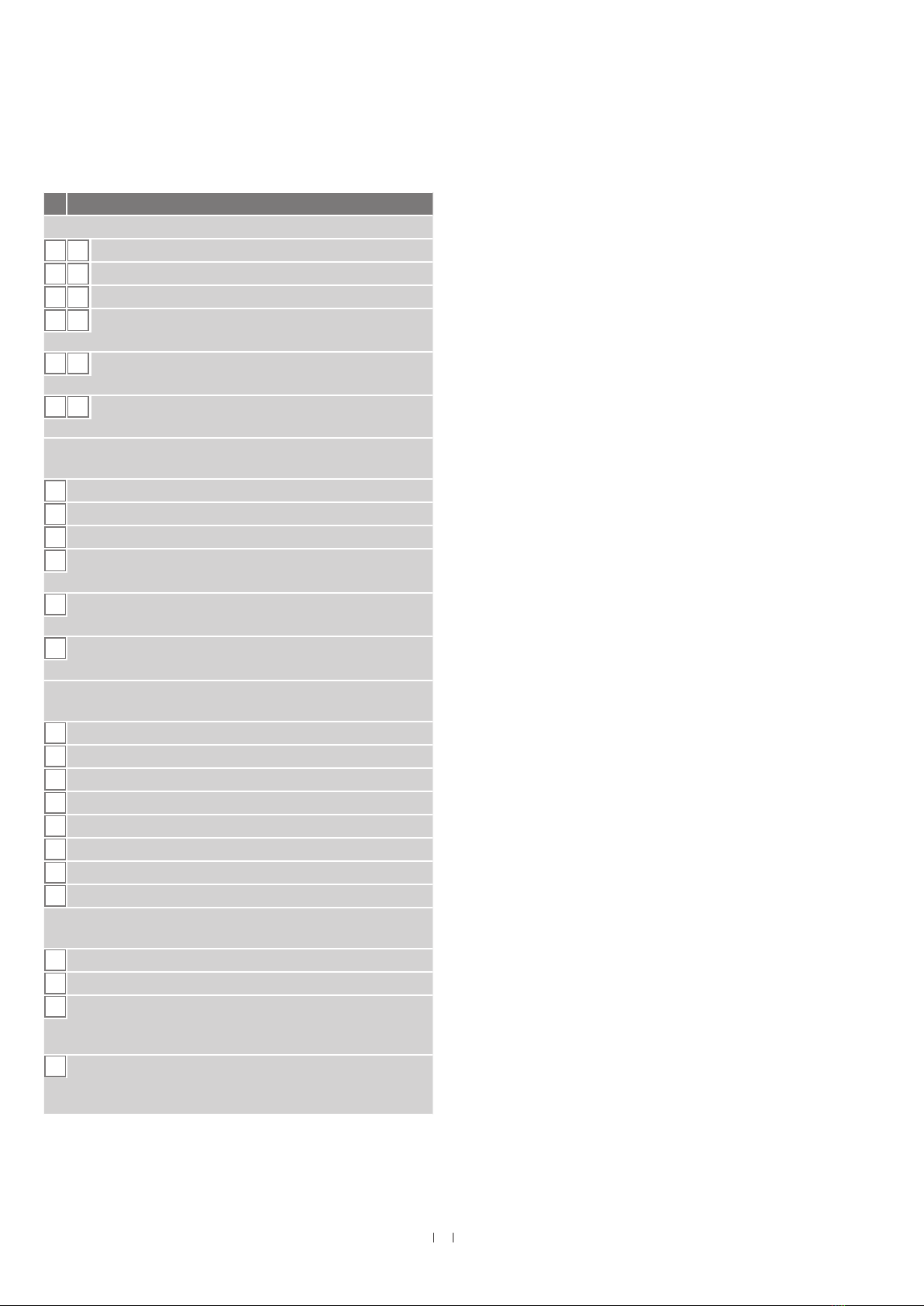
3.1 Order code of Temposonics®RP...................................................................................................................................................................5
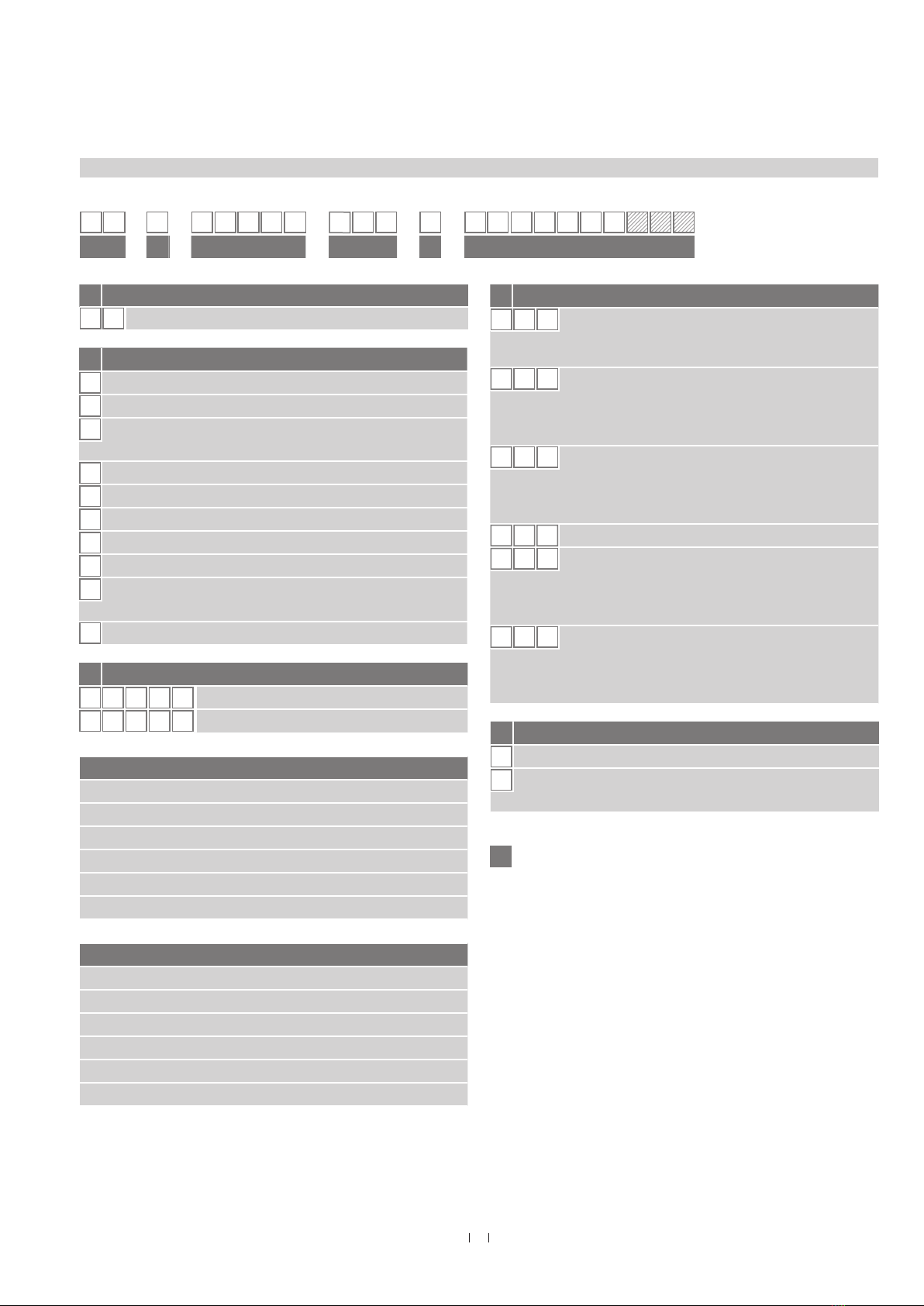
3.2 Order code of Temposonics®RH................................................................................................................................................................... 7
3.3 Order code of Temposonics®RD4................................................................................................................................................................. 9
3.4 Order code of Temposonics®RT4 ............................................................................................................................................................... 11
3.5 Order code of Temposonics® RF .................................................................................................................................................................13
3.6 Nameplate ...................................................................................................................................................................................................15
3.7 Approvals ....................................................................................................................................................................................................15
3.8 Scope of delivery......................................................................................................................................................................................... 15
4. Product description and commissioning ................................................................................................................... 16
4.1 Functionality and system design .................................................................................................................................................................16
4.2 Styles and installation of Temposonics® RP ................................................................................................................................................17
4.3 Styles and installation of Temposonics® RH ................................................................................................................................................18
4.4 Styles and installation of Temposonics® RD4 ..............................................................................................................................................21
4.4.1 Installation of RD4 with threaded flange ..........................................................................................................................................24
4.4.2 Installation of RD4 with pressure fit flange ........................................................................................................................................ 25
4.4.3 Installation of RD4’s sensor electronics housing ...............................................................................................................................26
4.5 Styles and installation of Temposonics® RT4...............................................................................................................................................27
4.5.1 Installation of RT4 with threaded flange.............................................................................................................................................29
4.5.2 Installation of RT4’s sensor electronics housing................................................................................................................................30
4.6 Styles and installation of Temposonics® RF.................................................................................................................................................31
4.7 Magnet installation......................................................................................................................................................................................33
4.8 Replacement of sensor................................................................................................................................................................................37
4.9 Electrical connections..................................................................................................................................................................................38
4.10 Frequently ordered accessories.................................................................................................................................................................39
5. Operation........................................................................................................................................................ 42
5.1 Getting started.............................................................................................................................................................................................42
5.2 Programming and configuration .................................................................................................................................................................42
6. Maintenance and troubleshooting .......................................................................................................................... 46
6.1 Error conditions, troubleshooting................................................................................................................................................................46
6.2 Maintenance................................................................................................................................................................................................46
6.3 Repair..........................................................................................................................................................................................................46
6.4 List of spare parts .......................................................................................................................................................................................46
6.5 Transport and storage .................................................................................................................................................................................46
7. Removal from service / dismantling........................................................................................................................ 46
8. Technical data.................................................................................................................................................. 47
8.1 Technical data of Temposonics®RP ............................................................................................................................................................47
8.2 Technical data of Temposonics® RH ............................................................................................................................................................49
8.3 Technical data of Temposonics® RD4 ..........................................................................................................................................................51
8.4 Technical data of Temposonics® RT4........................................................................................................................................................... 53
8.5 Technical data of Temposonics® RF............................................................................................................................................................. 55
9. Appendix ........................................................................................................................................................ 57