2-2
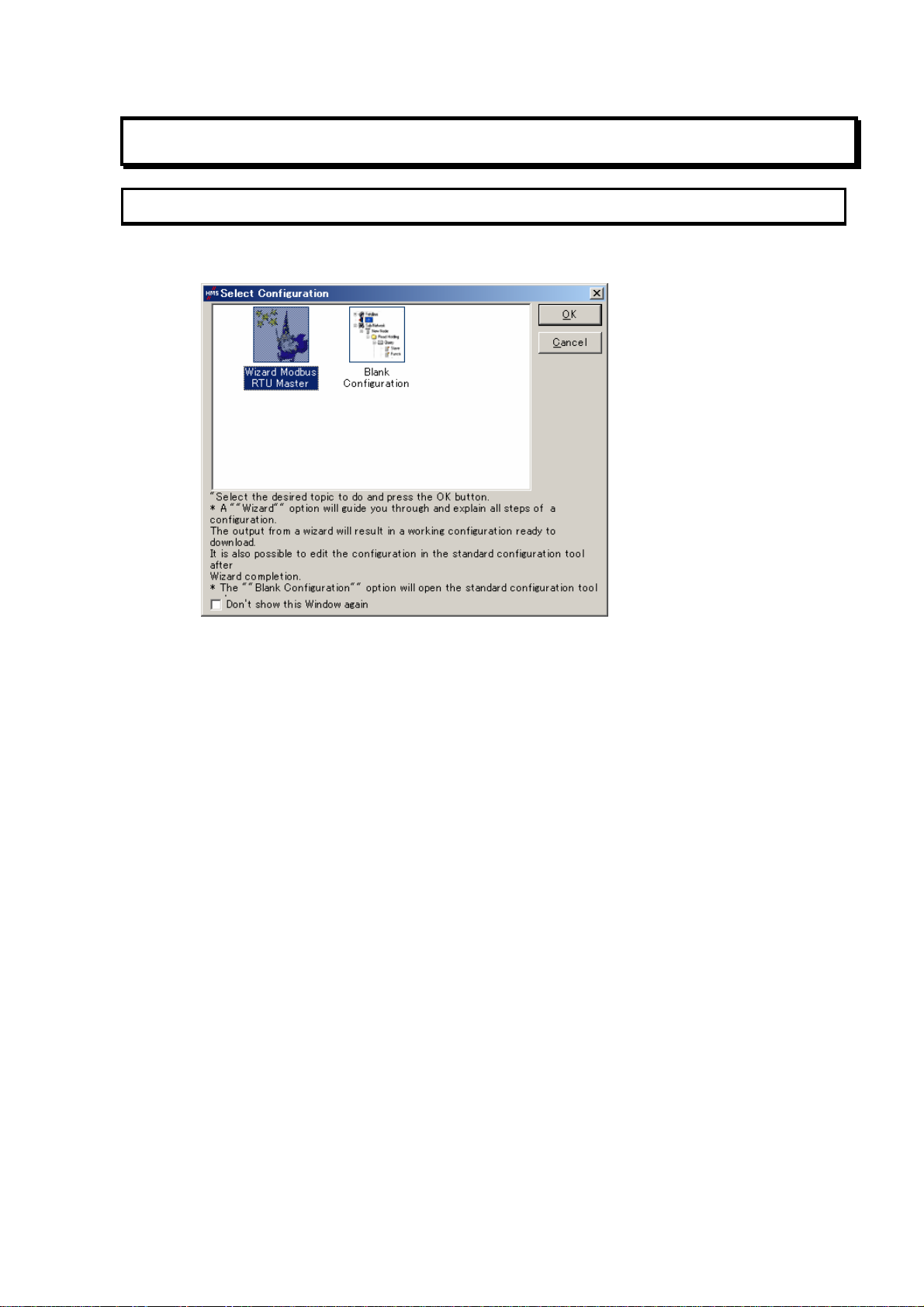
2.4. ABC Configuration Tool
"Configuration Tool for AnyBus Communicator 2.10" can be downloaded from the site of
HMS. Configuration Tool is common for all the fieldbuses.
http://www.anybus.com/eng/support/support.asp?PID=104&ProductType=AnyBus%20Communicator
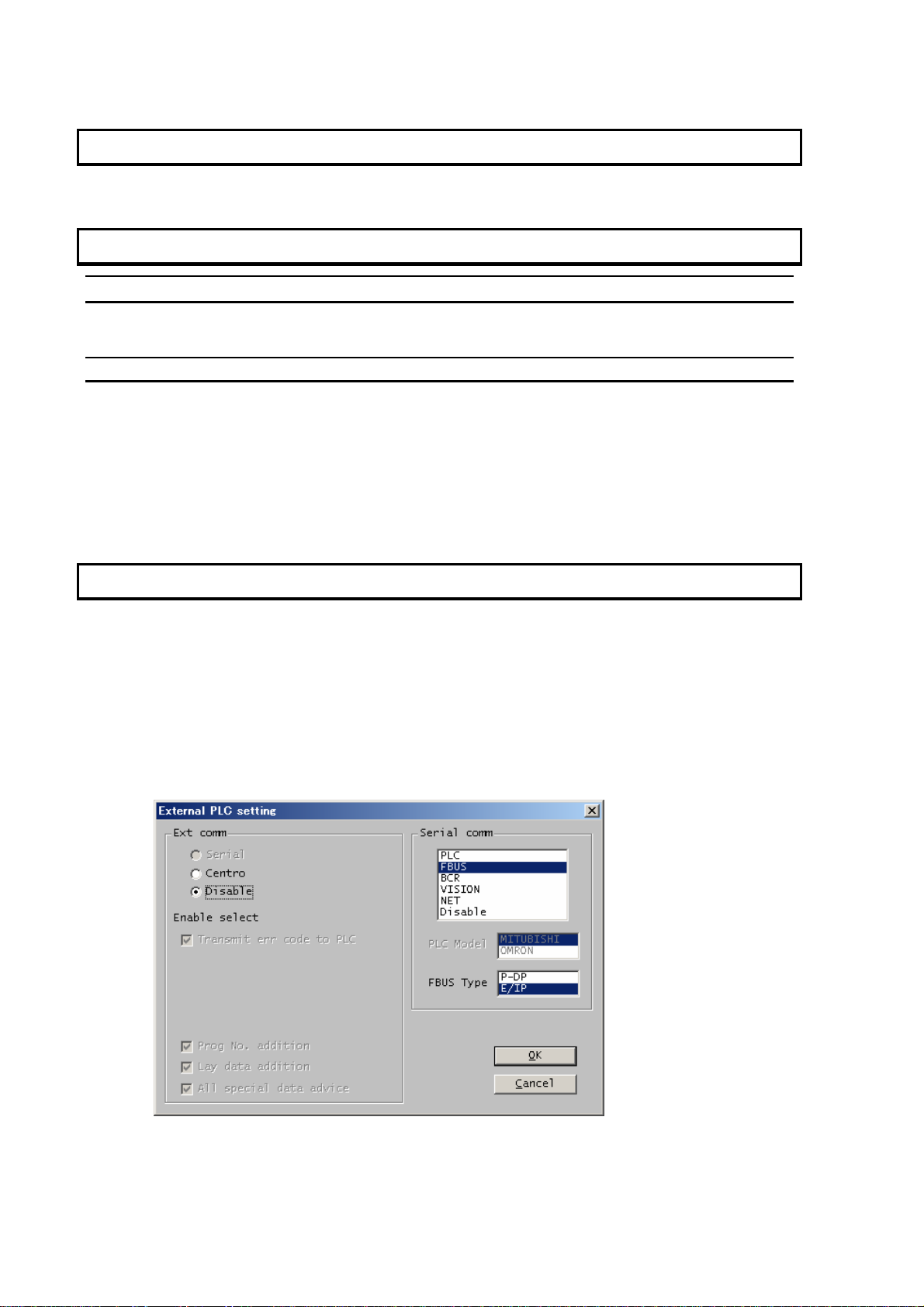
2.5. ABC Configuration File
Configuration File which Okura Yusoki offers shall be used. You have to download this
file to new ABC once.
Profibus AbcRc101ProfiDp.cfg
Ethernet/IP AbcRc101EhernetIP.cfg
onoffln.cfg
2.6. GDS File
GDS File required for Configuration of a Profibus master can be downloaded from the
site of HMS. Profibus Gateway of ABC corresponds only to the slave of Profibus-DP.
Therefore, you have to prepare Profibus Master independently. The GDS file name is
HMS_1803.gsd.
http://www.anybus.com/eng/support/support.asp?PID=104&ProductType=AnyBus%20Communicator
2.7. PC
PC which can perform ABC Configuration Tool is required in order to communicate by
RS232C between PC and AnyBus, to be equipped with one RS232C port. Since a
USB-RS232C converter may not communicate correctly, a direct RS232C interface is
required for it. The following clause explains about a connection cable.
2.8. Configuration Cable
When purchasing from HMS Configuration Cable which connects PC and ABC, the
part.no 017620 shall be ordered. When manufacturing, it can make with reference to
Pocket Guide. It can be used for the configuration of other ABC only with this cable.
2.9. Attaching ABC
CE and UL controllers are equipped with the DIN rail to mount on. Refer to the Document
of AnyBus Communicator for the method of mounting the ABC in the DIN rail.
2.9.1. Connection and routing
Separate the electric wire linked toABC from power cable.