User Manual LR-16F
OMEN-16F-202012
目录
1. Document description ..............................................................................................................................................1
2. Safety Instruction ......................................................................................................................................................1
3. Working Principle .....................................................................................................................................................1
4. Installation and operation ........................................................................................................................................2
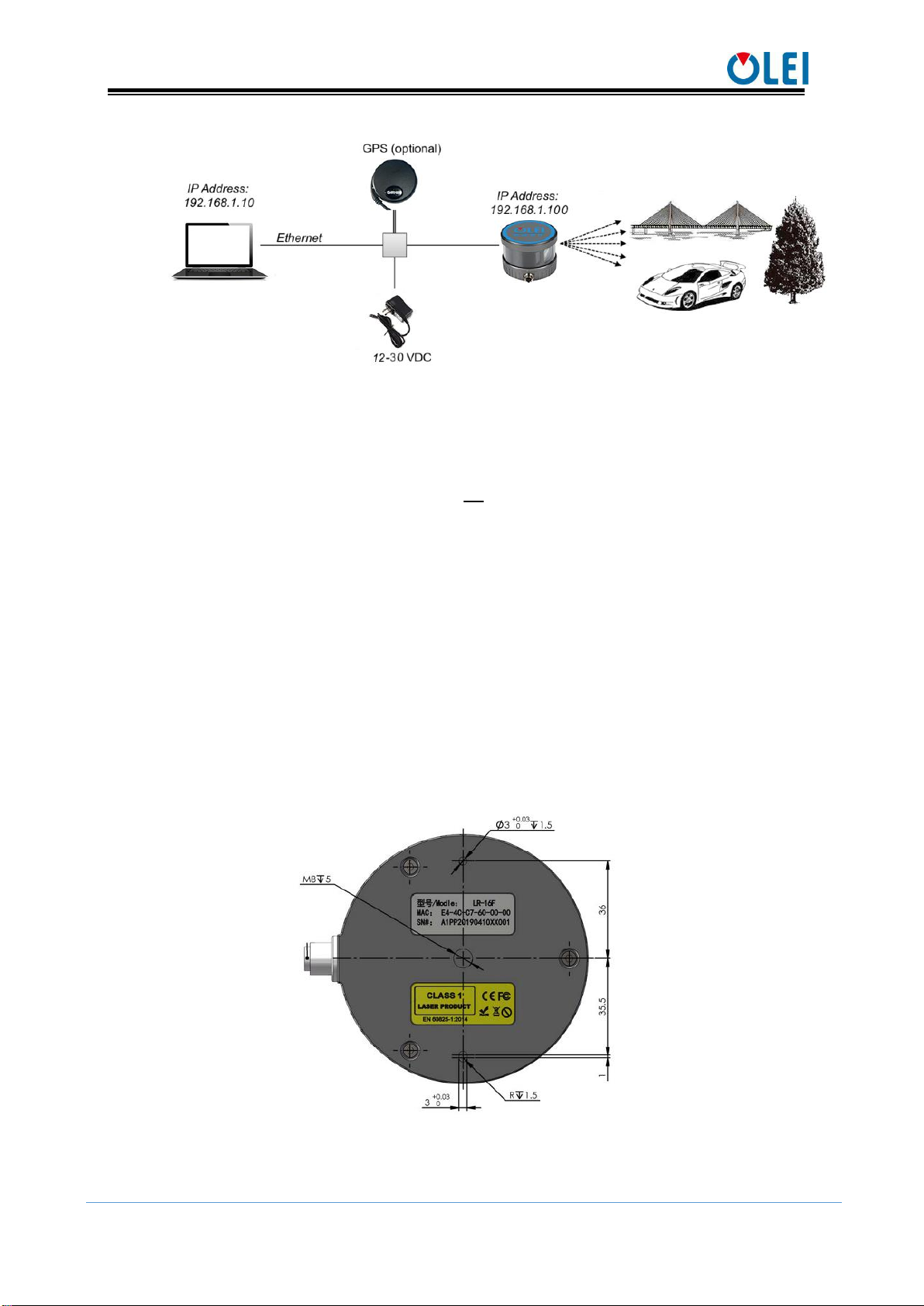
4.1. Mechanical interface............................................................................................................................................2
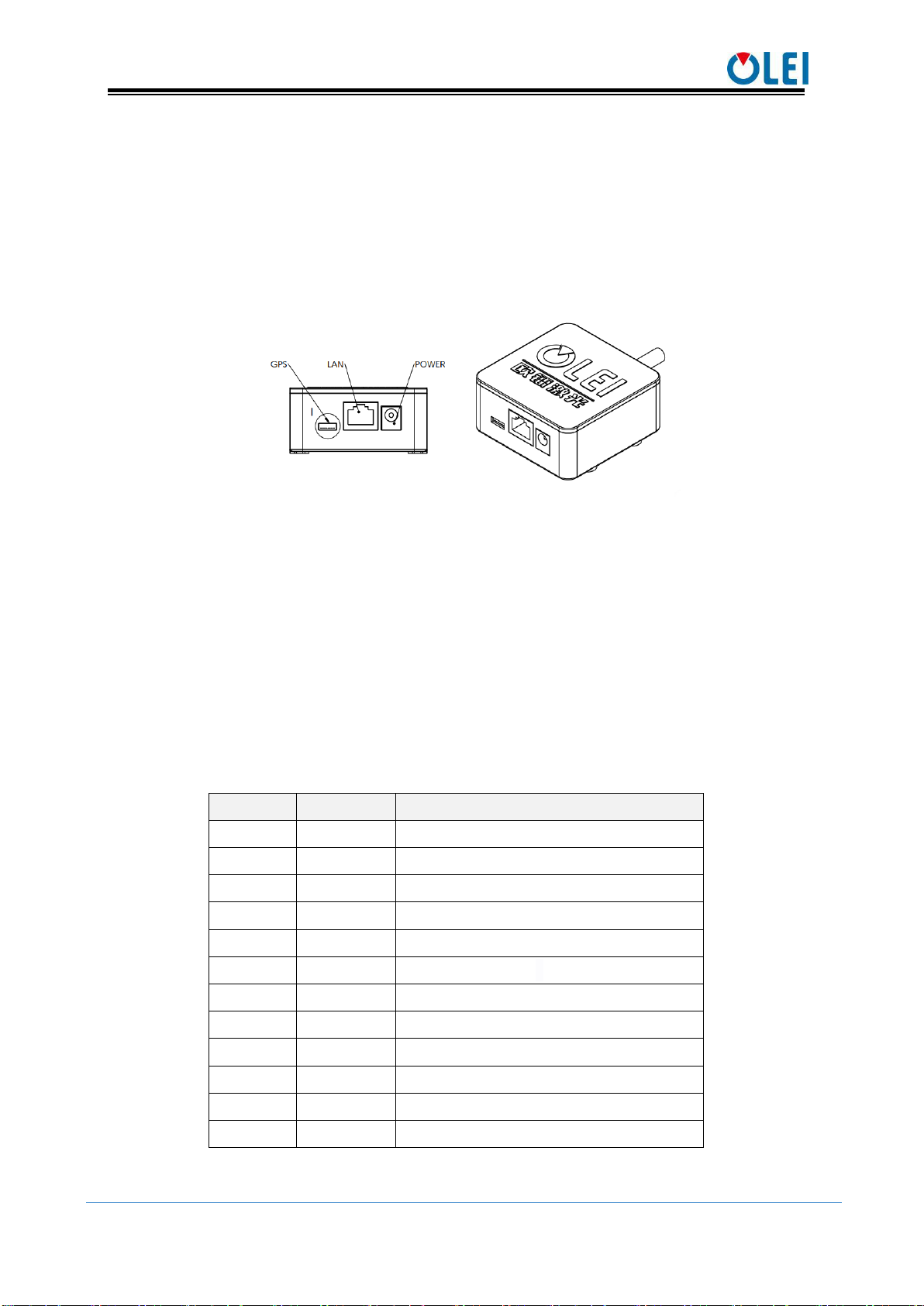
4.2. Electrical interface................................................................................................................................................3
4.2.1. Definition of aviation plugin .........................................................................................................................3
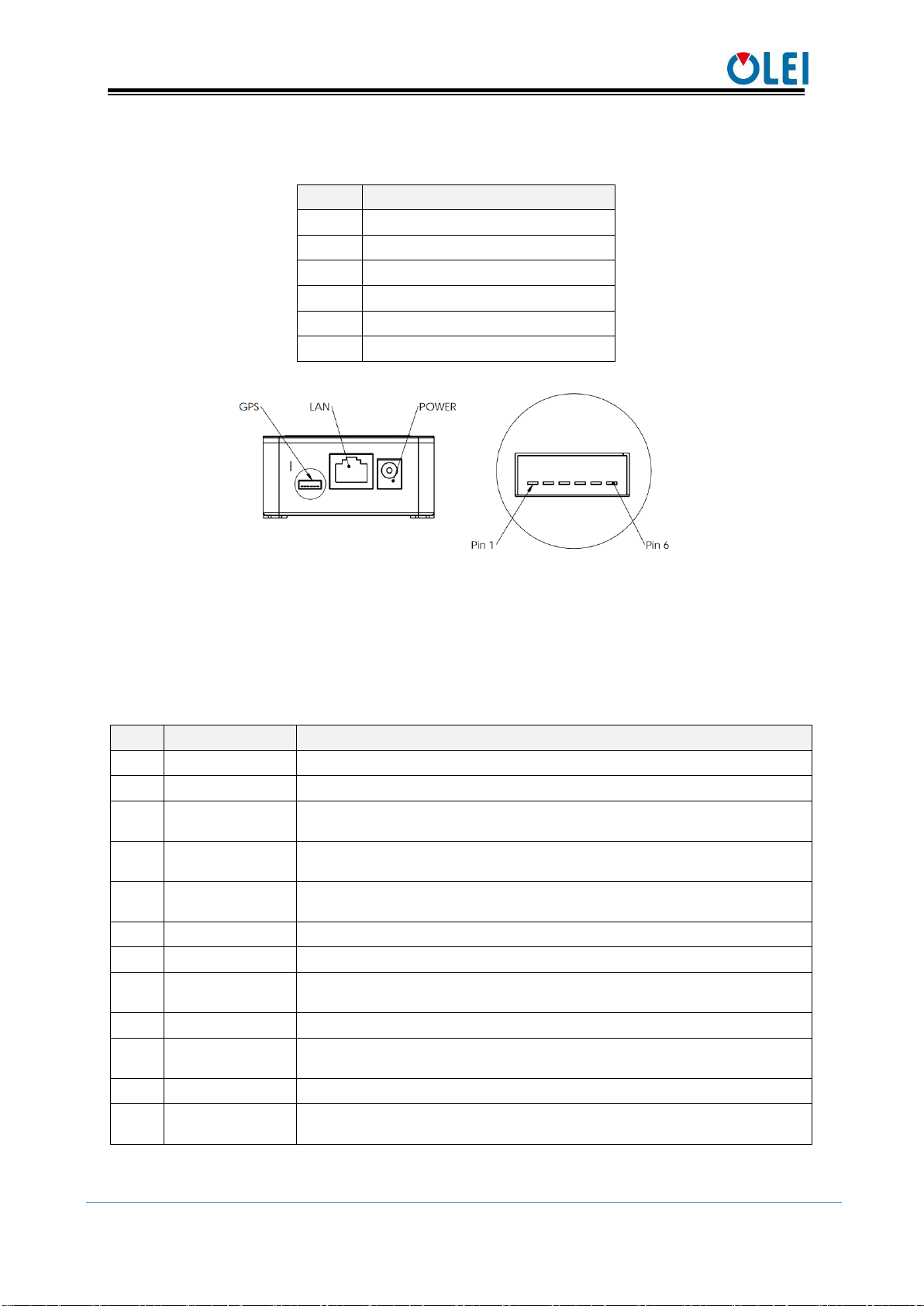
4.2.2. Definition of GPS ............................................................................................................................................4
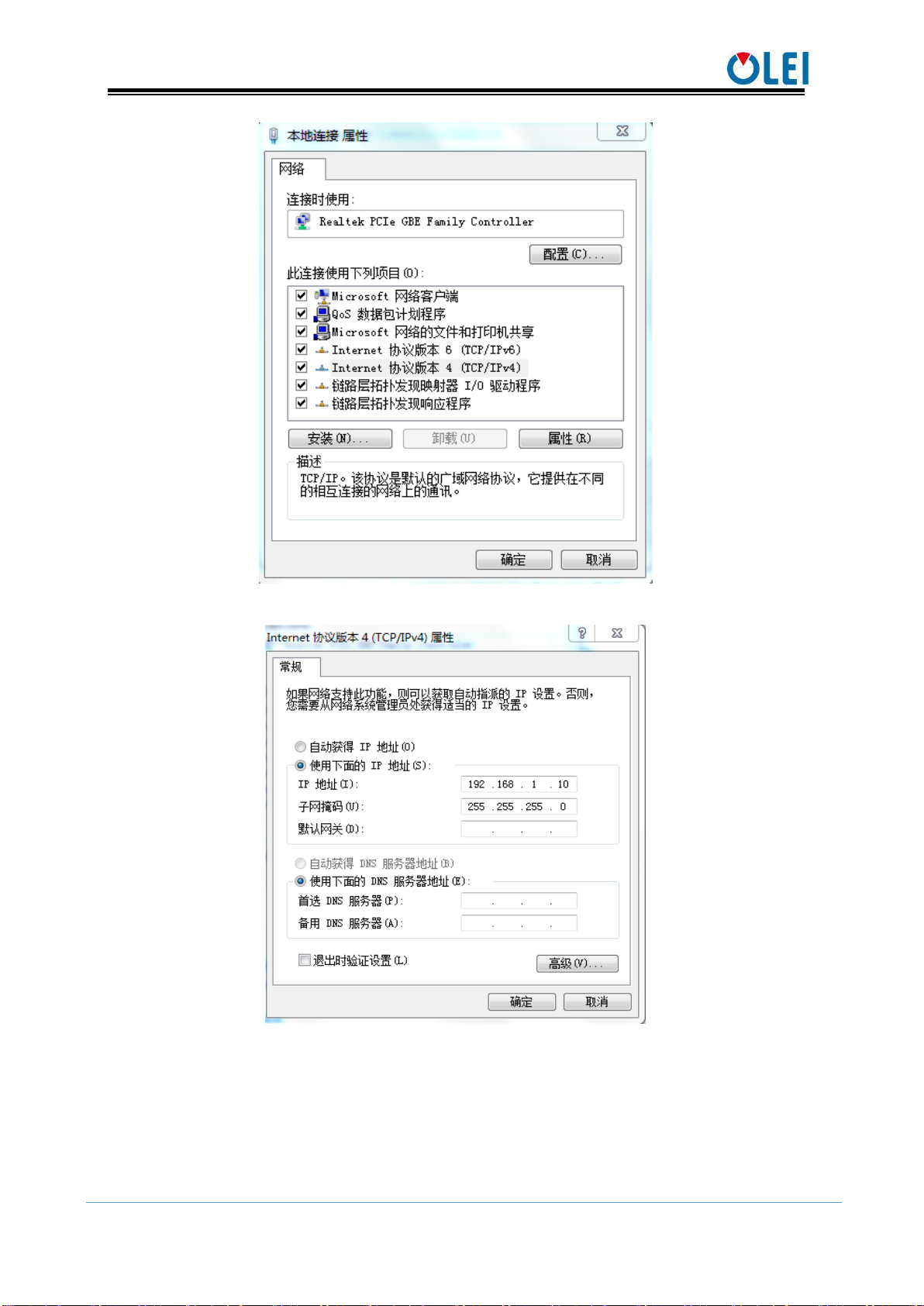
4.3. Communication interface....................................................................................................................................5
5. Serial port and PPS ...................................................................................................................................................6
6. Definition of vertical angle .....................................................................................................................................7
7. Format of data package............................................................................................................................................8
7.1. Communication protocol-data package...........................................................................................................8
7.1.1. Overview............................................................................................................................................................8
7.1.2. Header File ........................................................................................................................................................9
7.1.3. Time stamp ..................................................................................................................................................... 10
7.1.4. Factory mark .................................................................................................................................................. 10
7.2. Communication protocol-information package.......................................................................................... 10
7.2.1. Overview......................................................................................................................................................... 10
7.2.2. Definition of header...................................................................................................................................... 11
7.2.3. Definition of Lidar Info ............................................................................................................................... 11
7.3. Setup the protocol.............................................................................................................................................. 12
8. Numerical calculation ........................................................................................................................................... 13
8.1. Coordinate conversion...................................................................................................................................... 13
8.2. Azimuth ............................................................................................................................................................... 14
8.3. Azimuth interpolation....................................................................................................................................... 14
8.4. Distance ............................................................................................................................................................... 15
8.5. Time stamp.......................................................................................................................................................... 15
8.6. Emission time..................................................................................................................................................... 15
9. Parameter configuration of upper computer software ................................................................................... 16
9.1. Display software ................................................................................................................................................ 16
9.2. Configuration software..................................................................................................................................... 17
9.3. ROS driver package .......................................................................................................................................... 18
10. Troubleshooting ................................................................................................................................................. 18
Appendix A: Data Package ........................................................................................................................................... 19
Appendix B: Mechanical Dimensions........................................................................................................................ 22
Appendix C: Timetable .................................................................................................................................................. 23
Appendix D: GPS code analysis .................................................................................................................................. 24
Appendix E: analysis of 3D lidar coordinate code .................................................................................................. 24
Appendix F: analysis of interpolation code............................................................................................................... 25
Appendix G:ROS............................................................................................................................................................. 26
G.1 Install software........................................................................................................................................................ 26
G.2 Construction.............................................................................................................................................................. 26
G.3 Operation................................................................................................................................................................... 26
G.4 Real-time display..................................................................................................................................................... 27
Appendix H: Optical Avoidance Zone........................................................................................................................ 27