User Manual LR-1F
目录
1About this documen.....................................................................................................................................................1
2Safety information........................................................................................................................................................1
3Product introduction ....................................................................................................................................................1
4Installation and operation...........................................................................................................................................1
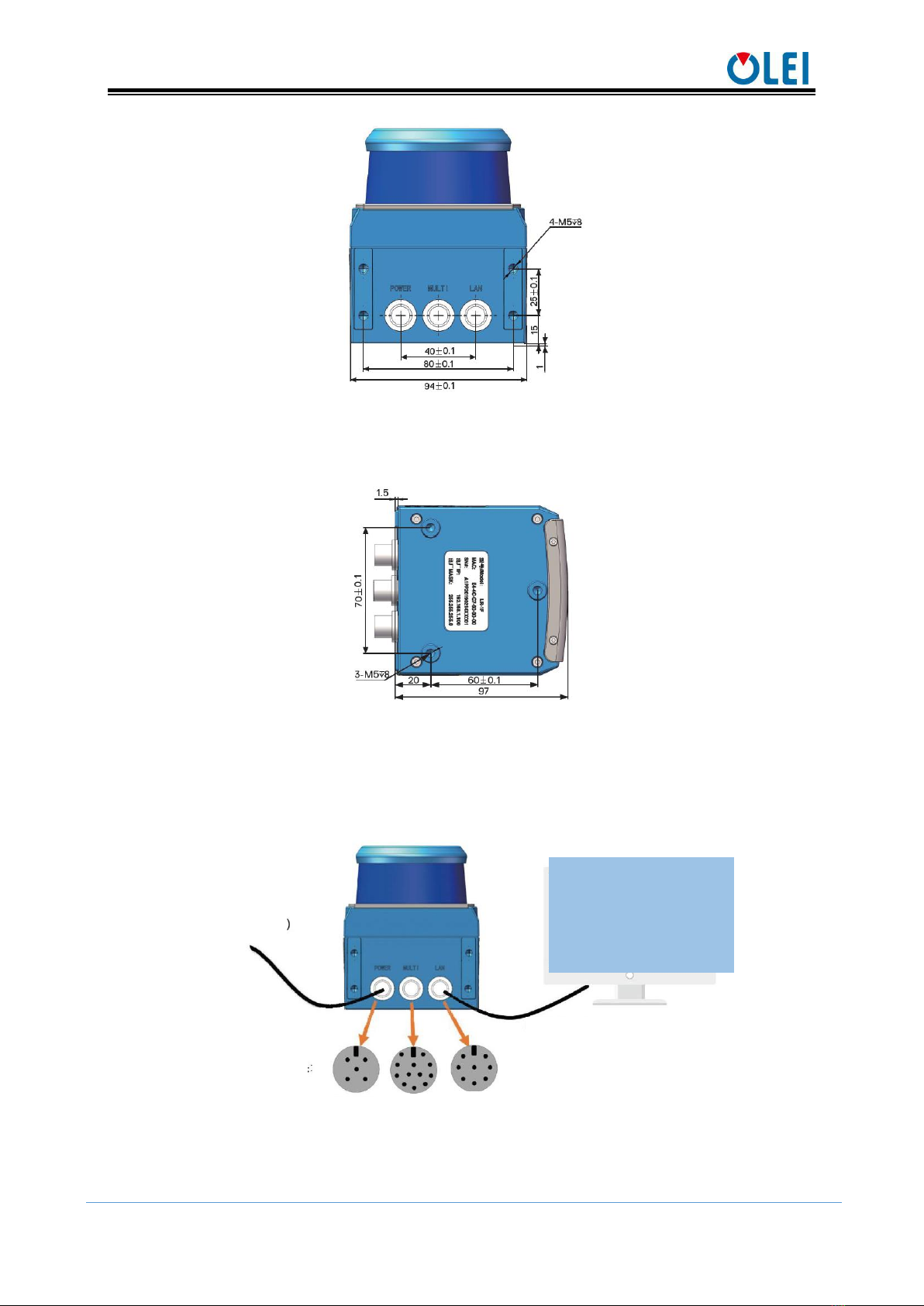
4.1 Mechanical interface...............................................................................................................................................1
4.2 Pin and wire color assignments............................................................................................................................2
4.3 Communication interface.......................................................................................................................................4
5Measurement principle................................................................................................................................................5
6Data packet format.......................................................................................................................................................6
6.1 Overview ...................................................................................................................................................................6
6.2 Definition of Header ...............................................................................................................................................6
6.3 Definition of Data Block........................................................................................................................................7
6.4 Data conversion........................................................................................................................................................7
7Parameter configuration..............................................................................................................................................8
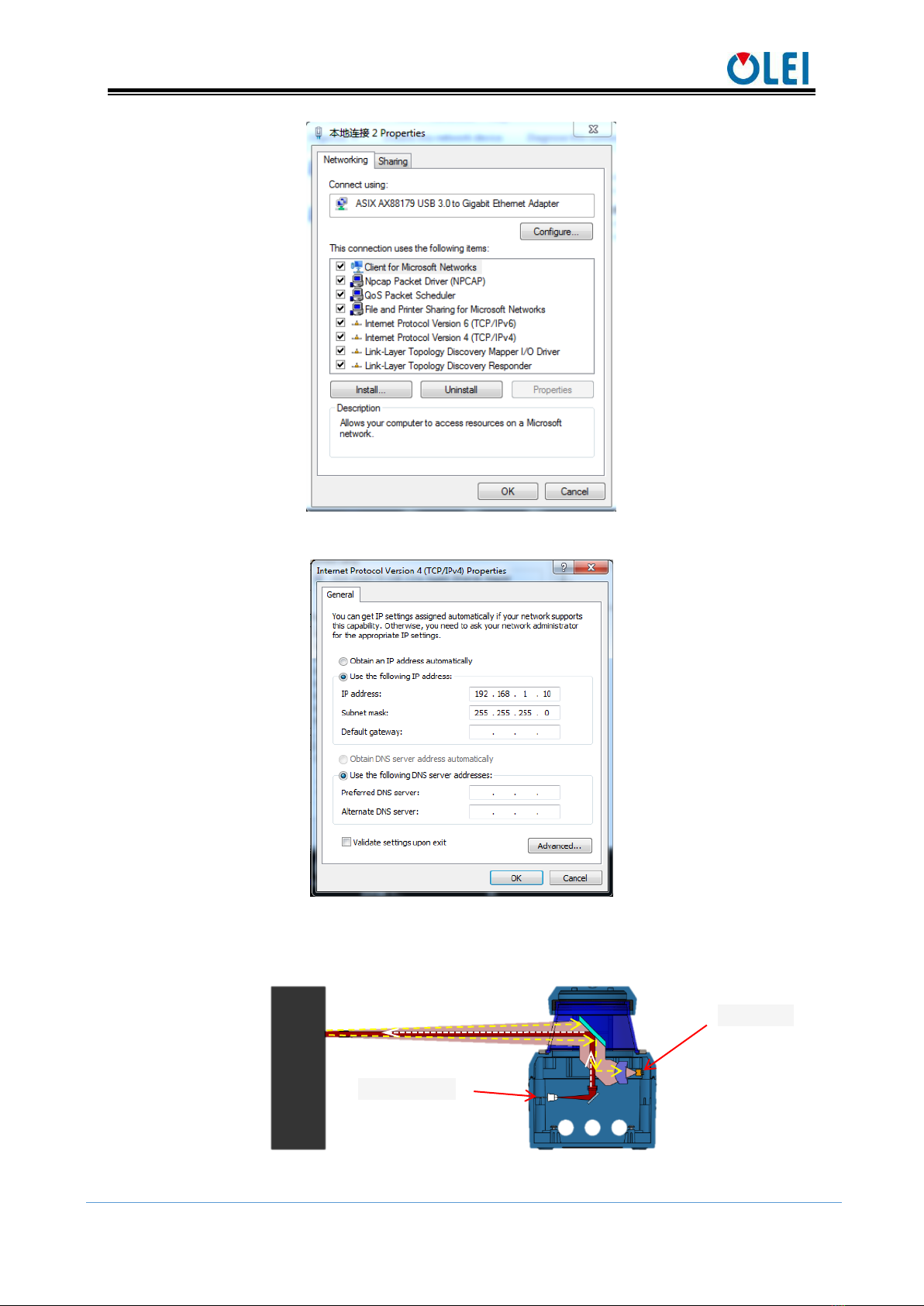
7.1 Parameter configuration of web page .................................................................................................................8
7.2 Configuration of OlamViewer..............................................................................................................................9
8Troubleshooting......................................................................................................................................................... 10
Appendix A Data packet ................................................................................................................................................... 11
Appendix B Mechanical Dimensions......................................................................................................................... 12
Appendix C Example of Electrical Connection....................................................................................................... 13
Appendix D Firmware Upgrade .................................................................................................................................. 13
Appendix E ROS Drive ................................................................................................................................................. 14
Appendix F Suggestions on Mechanical Installation ............................................................................................. 15
Appendix G Cleaning of sensor................................................................................................................................... 17
G.1 Notice........................................................................................................................................................................... 17
G.2 Materials required....................................................................................................................................................... 17
G.3 Cleaning method......................................................................................................................................................... 17