D878 MGB Rev00 HE650.docx 3/50
General Index
0General information ................................................................................................................................... 5
1General Infon............................................................................................................................................. 6
1.1 Warning on how to operate................................................................................................................ 6
1.2 Inspection on delivery........................................................................................................................ 6
1.3 Storage .............................................................................................................................................. 6
1.4 Disposing........................................................................................................................................... 6
1.5 Directives and technical standards considered ................................................................................. 6
2Schemes and adjustments ........................................................................................................................ 7
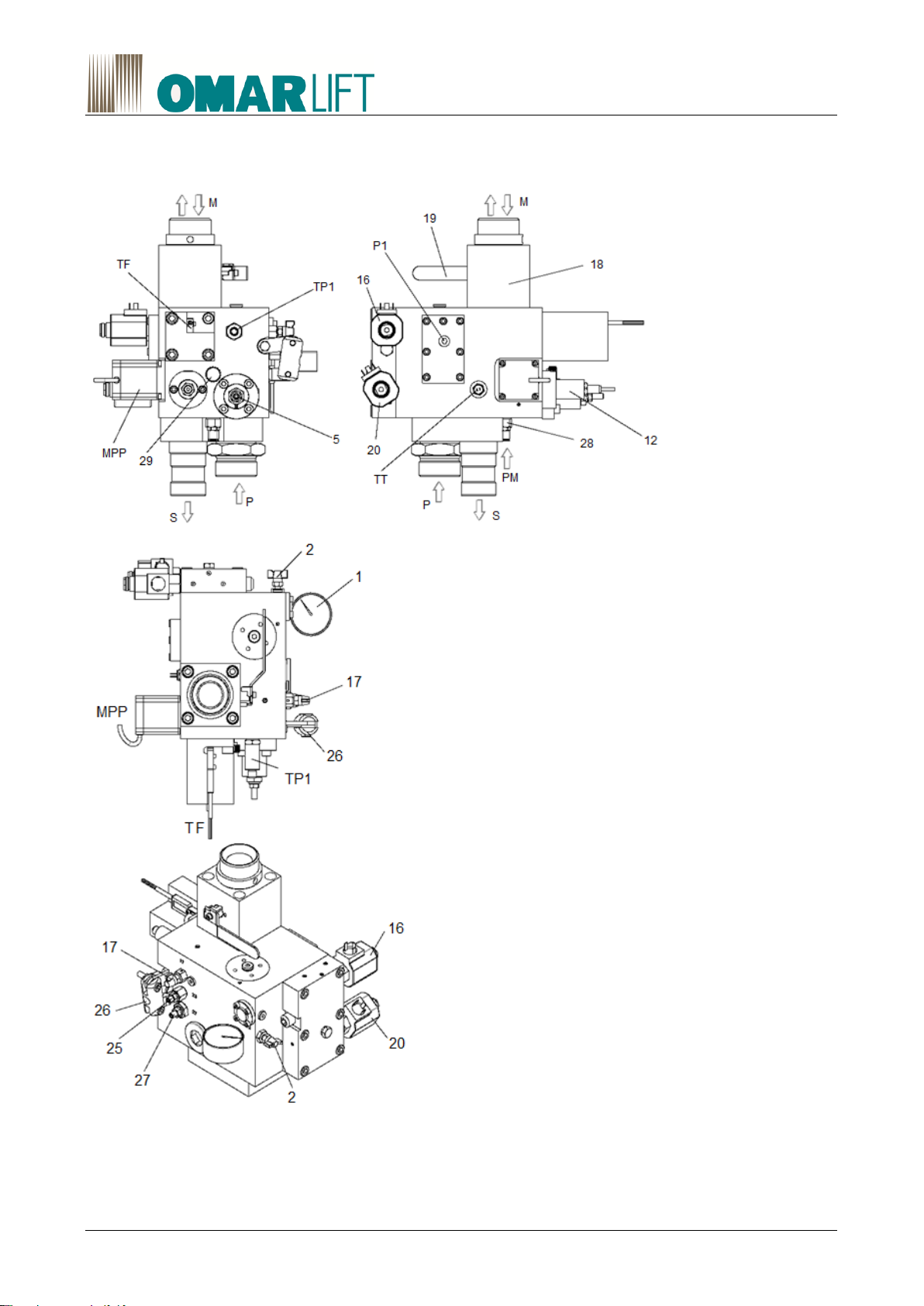
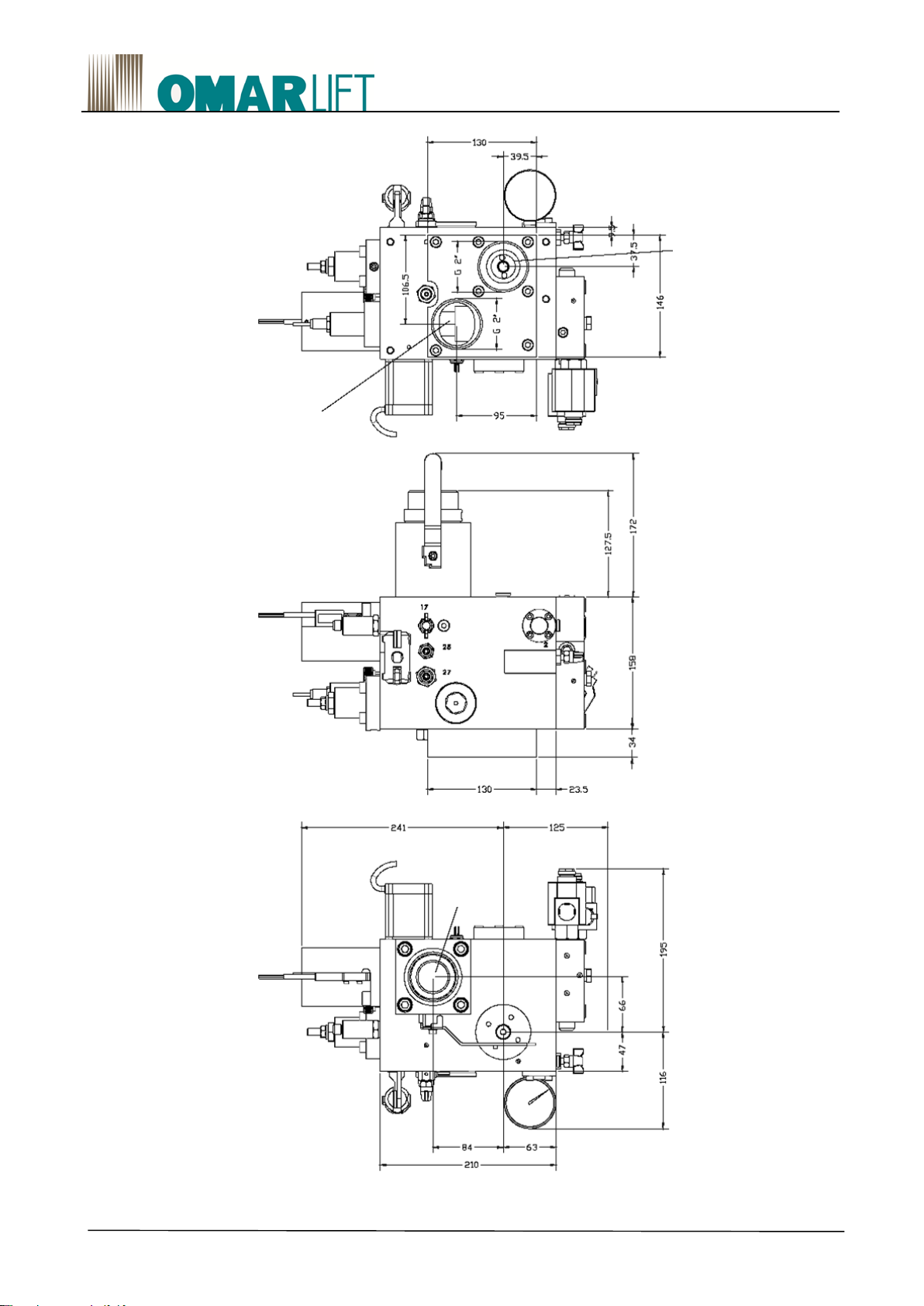
2.1 Main components .............................................................................................................................. 7
2.2 Hydraulic diagram.............................................................................................................................. 8
2.3 Valves functionaldiagram................................................................................................................... 9
2.4 Main components and connections of SCH001 board.................................................................... 11
2.5 Posizioni commutatore RSW........................................................................................................... 12
2.6 Wi-fi connection (Optional) .............................................................................................................. 12
2.7 SD-CARD parameters and records recovery.................................................................................. 12
2.8 SD-CARD parameters loading......................................................................................................... 13
2.9 Overload pressure automatic setting............................................................................................... 13
2.10 Software updating procedure........................................................................................................... 13
2.11 Working cycles parameters ............................................................................................................. 14
2.12 Signal and speed parameters combination..................................................................................... 15
2.13 Command device working diagram ................................................................................................. 16
2.14 SCH100 board dimensions and fixing ............................................................................................. 17
2.15 Upward working cycle...................................................................................................................... 18
2.16 Downward working cycle................................................................................................................. 20
2.17 Releveling........................................................................................................................................ 21
2.18 Rapture valve test (DSP=FC, FP) ................................................................................................... 21
2.19 Maximum pressure valve test (DSP=PP, HP)................................................................................. 22
2.20 Error condition ................................................................................................................................. 22
2.21 Upward working cycle diagram........................................................................................................ 23
3Protection against the uncontrolled movement of the cabin (UCM)........................................................ 24
3.1 Introduction...................................................................................................................................... 24
3.2 Schedule of operation signals and controls..................................................................................... 24
3.3 Test device against uncontrolled movement (DSP=uc, up ) ........................................................... 25
3.3.1 Ascent with empty car, and positioned in the upper part of the compartment ........................ 25
3.3.2 Descent with a full load in the cabin, and the cabin located at the bottom of the compartment
25
3.4 Self-control of type of functional redundancy .................................................................................. 25
3.4.1 Cycle with self monitoring functional redundancy.................................................................... 26
3.5 Verification of the periodic self-monitoring function of redundancy................................................. 27
3.5.1 Check the VSC valve sealing .................................................................................................. 27
3.5.2Check the VNR valve sealing.................................................................................................. 27
3.6 Self-control of monitoring PNP1 signal............................................................................................ 27
3.7 Control of the cycle of monitoring PNP1 signal............................................................................... 28