07
LIST OF FIGURES
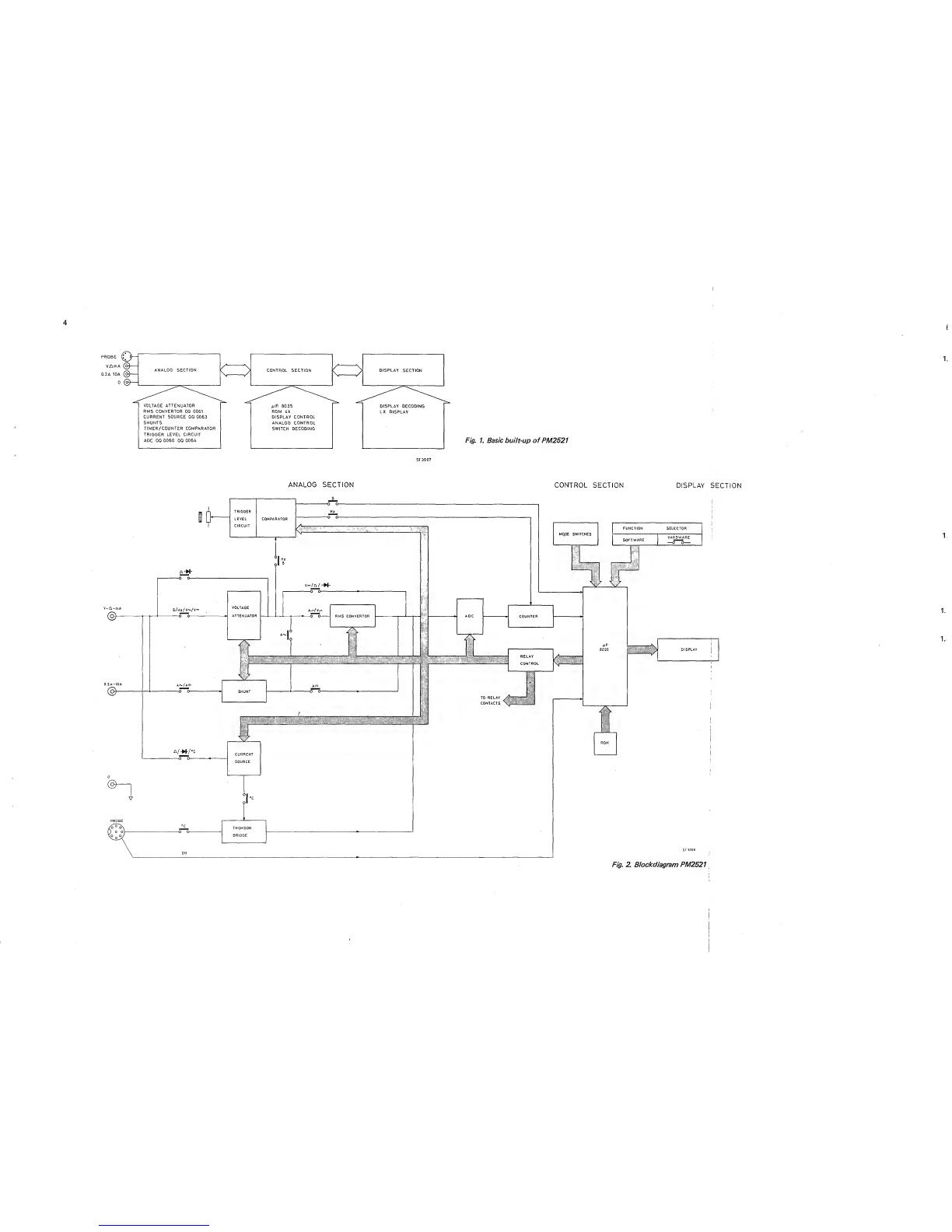
Fig. 1. Basic build-up of PM2521 4
Fig. 2. Block diagram PIVI2521 4
Fig. 3. Measurement flow-chart ... 7
Fig. 4. DC attenuator .1 8
Fig. 5. AC attenuator 8
Fig. 6. Basic 1-V convertor 9
Fig. 7. measurements 10
Fig. 8. Thomson bridge 11
Fig. 9. Block diagram -frequency measurements 12
Fig. 10. Normal trigger mode 13
Fig. 11. Special trigger mode 13
Fig. 12. Basic V-l convertor 14
Fig. 13. Low-pass active filter 15
Fig. 14. Switching part ADC 15
Fig. 15. Basic functional blocks of 8035/mP 17
Fig. 16. Pin allocation and functions of 8035/xP 19
Fig. 17. Mode switch interrupts 21
Fig. 18. Block diagram of the control section 24
Fig. 19. Measuring sequence 26
Fig. 20. Calibration routine 29
Fig. 21. Flow-chart internal test and adjust routine 28
Fig. 22. Flow-chart display output routine 32
Fig. 23. DC attenuator details 33
Fig. 24. AC attenuator details 34
Fig. 25. I-V convertor 35
Fig. 26. mesusrements details 37
Fig. 27. Temperature bridge 38
Fig. 28. Frequency measurements 39
Fig. 29. R.M.S. convertor 41
Fig. 30. Impedance convertor 42
Fig. 31. Active filter 43
Fig. 32. V-l convertor 44
Fig. 33. Interrupt controller 45
Fig. 34. Counter input control 47
Fig. 35. Counter 48
Fig. 36. Switch decoding 49
Fig. 37. Relay/FET control 51
Fig. 38. Address decoding 54
Fig. 39. Memory 55
Fig. 40. Display interface 56
Fig. 41 .Removing the top cover 60
Fig. 42. Removing the bottom cover and front 60
Fig. 43. Removing the front 60
Fig. 44. Front assembly 60
Fig. 45. Removing the thermal fuse 60
Fig. 45a. Removing the thermal fuse 60
Fig. 46. Adjusting elements 61
Fig. 47. Waveforms V~ part 74
Fig. 48. Waveforms trigger-level part 77
Fig. 49. Waveform, analog part 80
Fig. 50. Waveform, ADC part 81