EPick- InstructionManual
1.2.Object picking
TheEPickGripperallows:
1. Mainunit suction cup
2. Auxiliarysystem with multiple suction cups
Warning
Object picking causesthecompressionof thesuctioncup(s),whichcanresult inpinching pointsbetweenthegripperand the
load.Avoid presenceof bodypartsinthiszoneduring operation.
Warning
Beforepicking anynewobject or material inautonomousmode,always checkthat the resulting vacuum level issufficient to
ensuresafe gripping,inorderto prevent dropping orejection of theload.
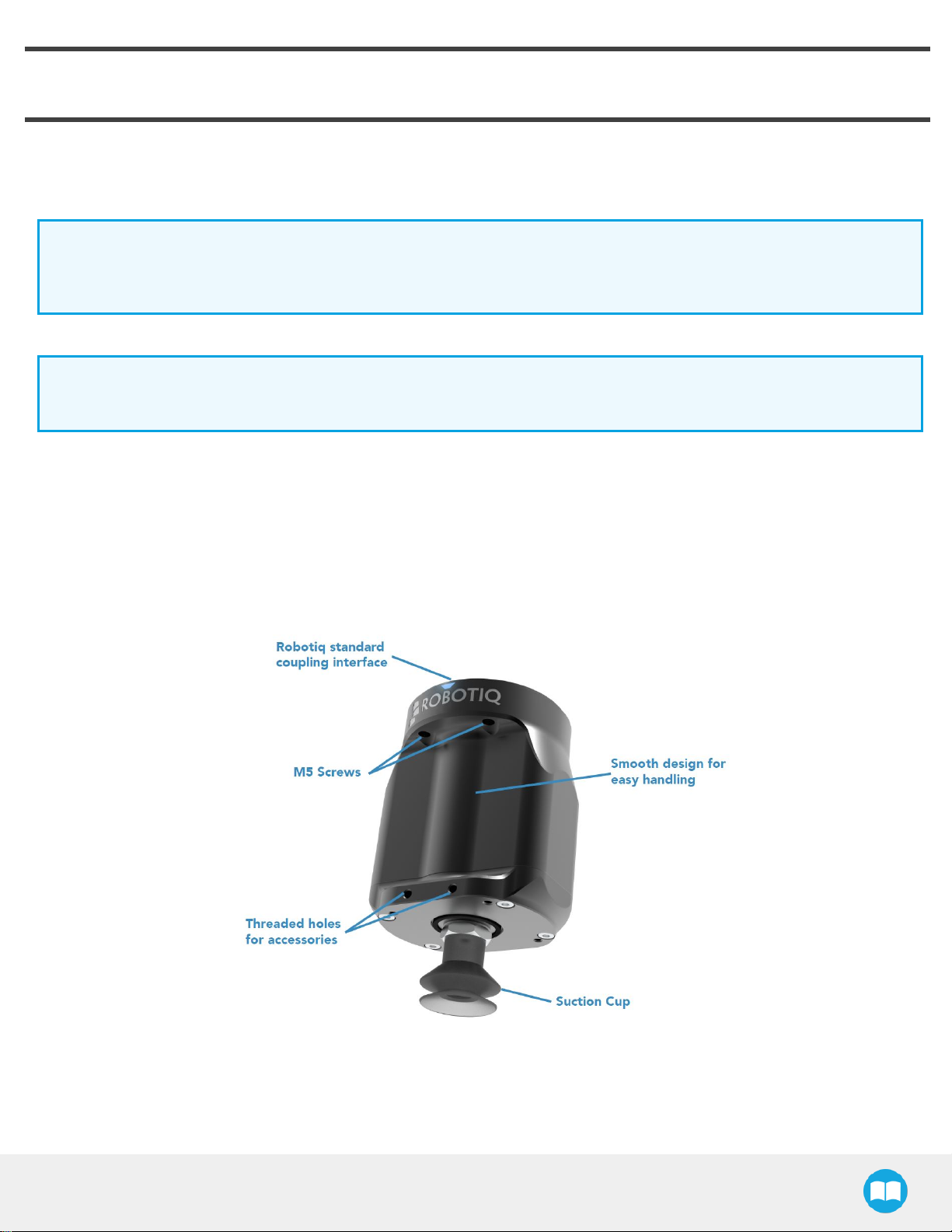
1.2.1.Main unit suctioncup
In order to use onlyonesuction cup,the single cup canbe mounted right intheport of thevacuum generator.
1.2.2.Auxiliarysystemwithmultiple suctioncups
A standard Suction Cup System can be attached to theEPick Vacuum Gripper.Thebracket normallyholdstwo or four suction cups
(corresponding to thefourportsof themanifold).
Anyunused manifold port should beblocked withamating plug to avoid airleakage.
Other custom mounting optionscanalso be used to benefit from a multiple suction cups solution
Caution
Custom brackets and platesmust meet the required technical specifications(refer to theTechnicaldimensionssection
subsection).
1.3.Setup and control
TheVacuum Gripperispowered and controlled directlyvia asingle devicecablethat carries24VDCpowerand ModbusRTU
communicationoverRS-485.
Info
Please referto the ElectricalSetup sectionsubsectionfor wiring information,and to theSoftware section for thecontrol of the
Vacuum Gripper.
Inorderto beused,theEPickGripperhasto beconnected to aGrippercoupling whichprovidesboththemechanicaland electrical
connectivityto the Gripper.
9