Im RMQC Losteil sind entsprechende Aussparungen (Nuten) vorgesehen, in die die Gabelzinken der Ablagestation
eingreifen. Aufgrund der unterschiedlichen Höhen der Nuten und Gabelzinken ist das Einfahren des RMQC Losteils
in die Ablagestation nur von einer Seite her möglich; bei Nichtbeachtung kann u.U. die Ablagestation beschädigt
werden.
5 Elektrischer Anschluss
WARNUNG
Elektrischer Schlag
Verletzungsgefahr
4Produkt über ein Netzgerät mit Schutzkleinspannung (PELV) betreiben.
Der elektrische Anschluss vom Produkt erfolgt intern. Das bedeutet, dass der Greifer bzw. das RMQC Losteil über
integrierte Kontakte verfügt. Über diese Kontakte werden alle Signale übermittelt.
Die elektrischen Kontakte müssen stets trocken, sauber und unbeschädigt sein. Eine Beschädigung der Kontakte
kann zur Funktionsstörung des Produkts führen.
6 Software installieren
Software Status: Polyscope (UR-Robot Software) muss den folgenden Softwarestand haben:
e-Serie: 5.8 oder höher, CB-Reihe: 3.12 oder höher.
Aktualisieren Sie ggf. die Robotersoftware unter: https://www.universal-robots.com/download/
Das URCap verwendet den Daemon-Port Ausgang 39991
6.1 Software installieren e-Serie
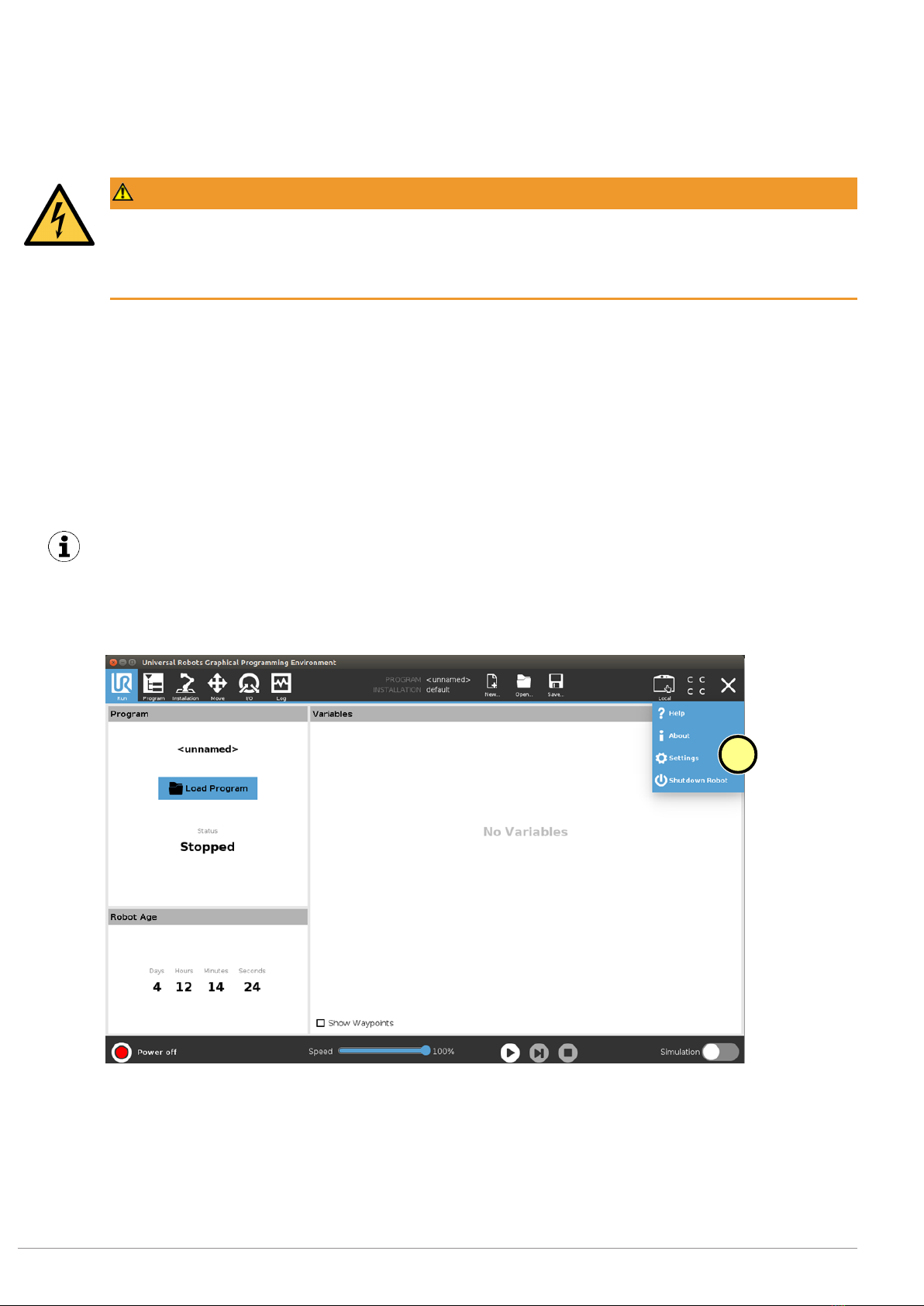
(1) Den Menüreiter "Menu > Settings > System > URCaps" drücken
Den USB-Stick bei eingeschaltetem System in das Programmierhandgerät stecken
(2) Wählen Sie "+", um das neue URCap zu installieren
Auf dem USB-Stick > URCap > "Schmalz Gripper” zur Installation auswählen und mit „Open“ bestätigen
(3) "Restart" drücken und auf den Neustart des Systems warten
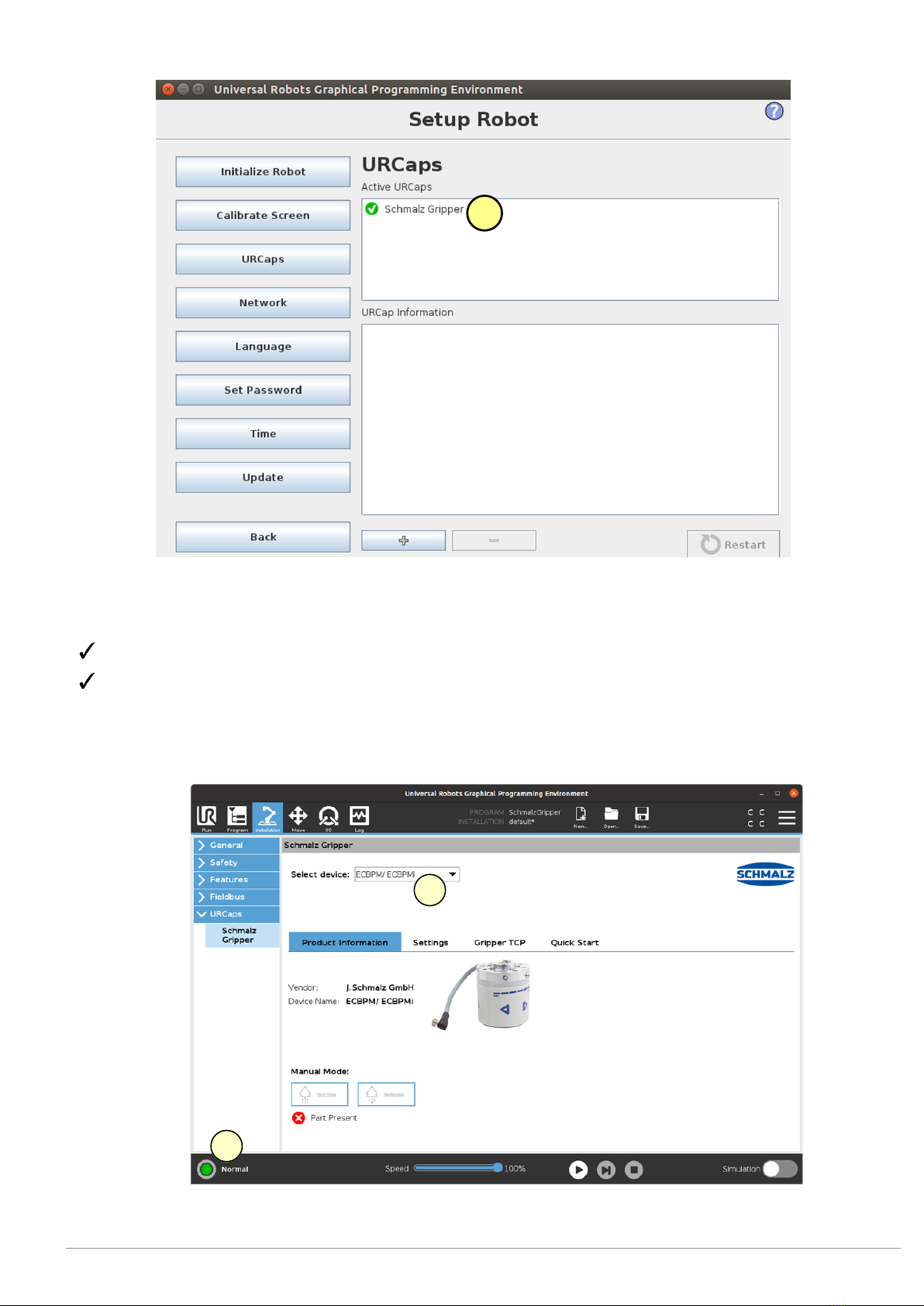
(4) Nach Wiederstart ist die URCap "Schmalz-Gripper" aktiviert
4 / 25 DE · 30.30.01.02882 · 00 · 06/21