Field Service Procedure – Replacement ICU PCB Kit, 4012
Page5of12
Document No
136831 Rev A
Copyright © Sea Tel, Inc 2012 - The information contained in this document is proprietary to Sea
Tel, Inc. This document may not be reproduced or distributed in any form without prior written
consent of Sea Tel, Inc.
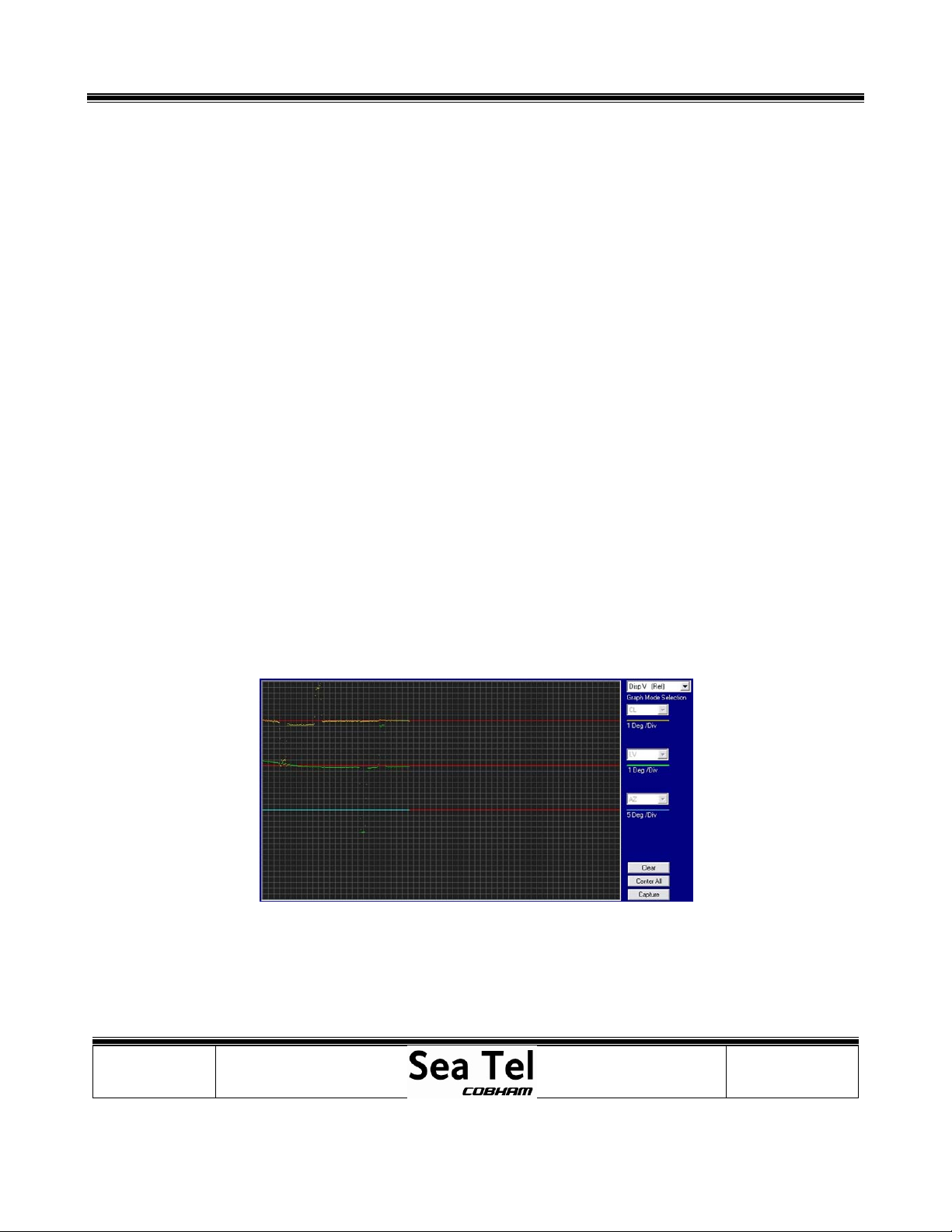
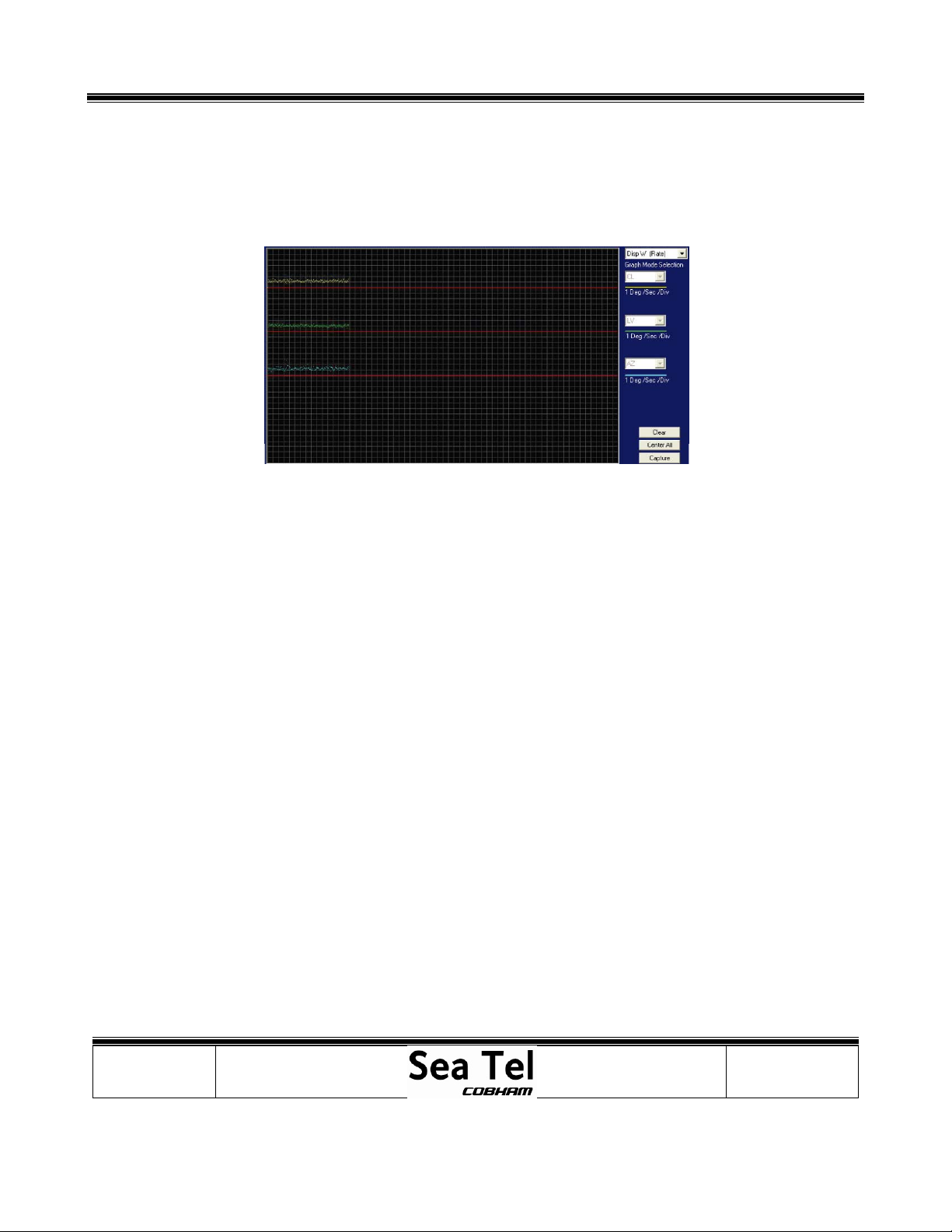
9. RateSensorMonitoring:
RatesensoroutputscanalsobemonitoredusingtheDISP_WscreenofDacRemPorfromthegraphsscreenofthe4012
GUItoverifyanydeviationsunderstaticconditions.Thetracesshouldremainconsistent;anydriftingorspikesarean
indicationthesensorsvoltageoutputischangingandthesensorisdefective(providednoforcesarebeingexertedonthe
system).
10. AzimuthTargeting:
Shouldtheantennahaveissuestargetinginazimuth,suchasnotaccuratelyfindingthesatelliteorrepeatedlyfindingthe
satelliteindifferentazimuthpositions,thenit’simportanttodiagnoseifthesystemismispointinginazimuthorrelative.
Relativefeedbackfromtheazimuthencodercanbeverifiedbyinitializingthesystem,verifyingitcalibratesitself
correctly,andthendrivingthepedestalclockwisein90degreeincrementsovera360degreerotation.Notethatthe
systempointscorrectlyrelativetothevesselandthatnoazimuthreferenceerrorisflaggedbytheICU.Amechanical
problemsuchasthebeltslippingonthesprocketcouldalsocausethiskindoferror.
Ifthesystemkeepsfindingthesatelliteatdifferentazimuthpositionsbutatthesamerelative,thentheencoderis
functioningcorrectlyandtheazimuthratesensoriscalculatingthemovementincorrectlycausingtheantennato
mispoint.
11. Drift:
Ifaratesensoris“drifting”itsnominalvoltageoutputhaschangedfromthecorrect2.5VDC.Thiswillcauseerrorinthe
axiscontrolloopandcausetheantennatomove.Itismorecommontoseethisdriftintheazimuthaxisasthecrosslevel
andelevationaxisbothhavealongtermreference,providedbythetiltsensor.However,shouldtheratesensorsdriftbe
largeenough,itcanover‐compensatethetiltsensorandthesystemwilldriveintooneofthecrosslevelorelevationend
stops.
Toverifyifthesystemisdriftinginazimuth,turntrackingoffandmonitortherelativeposition.Understaticconditions,
whenthevesselsheadingisunchanged,therelativecountshouldremainstationary.Iftherelativevaluebeginsto
changefromitscurrentposition,theazimuthratesensorisdrifting,introducingerrorintotheaxiscontrolloop.
IftheratesensorsarecheckedasOK,ashipsgyrocaninducedrift.ThiswillintroducelooperrorintotheICUcontrolloop
andcausetheantennatodrift.Ifit’ssuspectedtheheadingiscausingtheantennatodriftthesystemcanbesetto
satellitereferencemodetouncouplethegyrocompassfromthecontrolloop.
*Note:IftheICUandgyrocompassaredisplayingthesameheadingreadingthisisn’tanindicationthattheheading
valueiscorrect,onlythattheICUisreadingtheinformationcorrectly.