SmartCow Uranus User manual
Uranus User's Manual
Version 1, March 2023

Copyright and legal statement
©2023 SmartCow AI Technologies Ltd. All rights reserved.
No part of this document may be reproduced, translated, modified, published, distributed, transmitted, or displayed
in any form or by any means, without the prior written permission from SmartCow AI Technologies Ltd. SmartCow® is
a registered trademark of SmartCow AI Technologies Ltd. Otherwise, you will be responsible for any infringement of
copyright law.
All other product names, brands, or logos used herein are the trademarks or registered trademarks of their respective
owners. All such material is used with the permission of the owners. The content of this document is furnished
confidential, privileged and for informational and instructional use only. It is subject to change without notice, and
should not be construed as a commitment by SmartCow. SmartCow acts in good faith and attempts to ensure that
content is accurate, complete or reliable, but it does not represent it to be error-free. SmartCow, its subsidiaries, the
directors, employees, and agents assume no responsibility or liability for any inaccuracies, omissions, or errors that may
appear in the content of this document.
Disclaimer
The information in this document is subject to change without prior notice and does not represent commitment
from SmartCow AI Technologies Ltd. However, users may update their knowledge of any product in use by constantly
checking its manual posted on our website: http://www.smartcow.ai. SmartCow shall not be liable for direct, indirect,
special, incidental, or consequential damages arising out of the use of any product, nor for any infringements upon
the rights of third parties, which may result from such use. Any implied warranties of merchantability or fitness for any
particular purpose is also disclaimed.
Copyright and legal statement ii

Acknowledgements
All other products’ names or trademarks are properties of their respective owners.
• NVIDIA®, the NVIDIA logo, Jetson™, Jetson Orin™, and JetPack™ are trademarks of the NVIDIA Corporation.
• Arm® and Arm®v8-M architecture are registered trademarks of Arm Limited.
• Linux® is the registered trademark of Linus Torvalds in the U.S. and other countries.
• Ubuntu is a registered trademark of Canonical.
All other product names or trademarks are properties of their respective owners. No ownership is implied or assumed
for products, names or trademarks not herein listed by the publisher of this document.
Acknowledgements iii

Declaration of conformity
FCC
This equipment has been tested and verified to comply with the limits for a Class A digital device, pursuant to Part
15 of FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the
equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency
energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio
communications. Operation of this equipment in a residential area (domestic environment) is likely to cause harmful
interference, in which case the user will be required to correct the interference (take adequate measures) at their own
expense.
CE
The product described in this manual complies with all applicable European Union (CE) directives if it has a CE marking.
For computer systems to remain CE compliant, only CE-compliant parts may be used. Maintaining CE compliance also
requires proper cable and cabling techniques.
Declaration of conformity iv

Safety precautions
Please read the following safety instructions carefully. It is advised that you keep this manual for future references.
• All cautions and warnings on the device should be noted.
• All cables and adapters supplied by SmartCow are certified and in accordance with the material safety laws and
regulations of the country of sale. Do not use any cables or adapters not supplied by SmartCow to prevent system
malfunction or fires.
• Make sure the power source matches the power rating of the device.
• Position the power cord so that people cannot step on it. Do not place anything over the power cord.
• Always completely disconnect the power before working on the system’s hardware.
• No connections should be made when the system is powered as a sudden rush of power may damage sensitive
electronic components.
• If the device is not to be used for a long time, disconnect it from the power supply to avoid damage by transient
over-voltage.
• Always disconnect this device from any AC supply before cleaning.
• While cleaning, use a damp cloth instead of liquid or spray detergents.
• Make sure the device is installed near a power outlet and is easily accessible.
• Keep this device away from humidity.
• Place the device on a solid surface during installation to prevent falls.
• Do not cover the openings on the device to ensure optimal heat dissipation.
• Watch out for high temperatures when the system is running.
• Do not touch the heat sink or heat spreader when the system is running.
• Never pour any liquid into the openings. This could cause fire or electric shock.
• As most electronic components are sensitive to static electrical charge, be sure to ground yourself to prevent static
charge when installing the internal components. Use a grounding wrist strap and contain all electronic components
in any static-shielded containers.
• If any of the following situations arises, please contact our service personnel:
• Damaged power cord or plug
• Liquid intrusion to the device
• Exposure to moisture
• Device is not working as expected or in a manner as described in this manual
• The device is dropped or damaged
• Any obvious signs of damage displayed on the device
• Do not leave this device in an uncontrolled environment with temperatures beyond the device’s permitted
environment with temperatures (see specification) to prevent damage.
• RTC battery warnings
• Use replacement batteries that comply with the recommended battery safeguards, especially for certain types of
lithium batteries.
• Do not dispose of batteries into a fire or oven, or crush them, as this can lead to an explosion.
• Do not leave batteries in extremely hot environments, as this can cause flammable liquids or gases to leak and
ignite.
• Do not subject batteries to extremely low air pressures, as this may cause flammable liquids or gases to leak,
resulting in an explosion.
Safety precautions v

Warranty and RMA
Warranty Period
SmartCow warrants that products will be free from defects in material and workmanship for 2 years (24 months),
beginning on the date of invoice by SmartCow. SmartCow will provide free of charge warranty coverage to all the
products manufactured and sold in case the purchased product is proven defective in material or workmanship under
normal use during the warranty period.
Return Merchandise Authorization (RMA)
• Customers can claim RMA service by requesting “SmartCow RMA Service Form” from the account manager. After
filling out the form, the account manager will reply with a corresponding RMA number.
• Customers must collect all the information about the problems encountered and note anything abnormal or,
print out any on-screen messages, and describe the problems on the “SmartCow RMA Service Form” for the RMA
number application process.
• Customers shall return the RMA to SmartCow within 7 working days after the RMA number was generated and
enclose the “SmartCow RMA Service Form” with the returned packages.
• SmartCow has the right to refuse providing repair services for products no longer in warranty. If SmartCow chooses
to provide repair services, the customer will be charged for the repair fees and component fees. Additionally, the
needed repairing time depends on component acquisition.
• Any products returned by SmartCow to other locations besides the customers’ site will bear an extra charge and will
be billed to the customer.
Warranty and RMA vi

RoHS compliance
SmartCow RoHS environmental policy
SmartCow is a global citizen for building digital infrastructure. We are committed to providing green products and
services, which are compliant with European Union RoHS (Restriction on Use of Hazardous Substance in Electronic
Equipment) directive 2011/65/EU and 2015/863, to be your trusted green partner and to protect our environment.
RoHS restricts the use of Lead (Pb) < 0.1% or 1,000ppm, Mercury (Hg) < 0.1% or 1,000ppm, Cadmium (Cd) < 0.01% or
100 ppm, Hexavalent Chromium (Cr6+) < 0.1% or 1,000ppm, Polybrominated biphenyls (PBB) < 0.1% or 1,000ppm, and
Polybrominated diphenyl Ethers (PBDE) < 0.1% or 1,000ppm.
In order to meet the RoHS compliant directives, SmartCow has established an engineering and manufacturing task force
to implement the introduction of green products. The task force will ensure that we follow the standard SmartCow
development procedure and that all the new RoHS components and new manufacturing processes maintain the highest
industry quality levels for which SmartCow is renowned.
The model selection criteria will be based on market demand. Vendors and suppliers will ensure that all designed
components will be RoHS compliant.
RoHS compliance vii

Contents
Copyright and legal statement.............................................................................................................ii
Acknowledgements..............................................................................................................................iii
Declaration of conformity................................................................................................................... iv
Safety precautions................................................................................................................................ v
Warranty and RMA..............................................................................................................................vi
RoHS compliance................................................................................................................................ vii
Chapter 1: About Uranus......................................................................................................................9
1.1 Features and key benefits of Uranus.................................................................................................................9
1.2 Specifications of Uranus.....................................................................................................................................9
1.3 Block diagram...................................................................................................................................................10
1.4 Layout............................................................................................................................................................... 10
1.5 I/O ports, pins, and switches...........................................................................................................................11
Chapter 2: Ordering information........................................................................................................13
2.1 Uranus package contents.................................................................................................................................13
2.2 Compatible Jetson modules.............................................................................................................................13
Chapter 3: Testing the OLED of Uranus..............................................................................................15
3.1 Downloading the OLED demo files for Uranus................................................................................................15
3.2 Testing the OLED of Nano eMMC-based devices............................................................................................ 15
3.3 Testing the OLED of TX2 NX eMMC-based devices......................................................................................... 16
3.4 Testing the OLED of Xavier NX eMMC-based devices..................................................................................... 17
Chapter 4: Flashing your firmware.....................................................................................................19
4.1 Putting your device into recovery mode......................................................................................................... 19
4.2 Flashing firmware for Nano eMMC................................................................................................................. 19
4.3 Flashing firmware for TX2 NX eMMC.............................................................................................................. 19
4.4 Flashing firmware for Xavier NX eMMC.......................................................................................................... 20
Appendix A: (Optional) Installing the Uranus fan kit......................................................................... 21
Appendix B: (Optional) Installing an mPCIe card into Uranus........................................................... 23
viii
About Uranus 1
Topics:
•Features and key benefits of Uranus
•Specifications of Uranus
•Block diagram
•Layout
•I/O ports, pins, and switches
Uranus is an AI edge fanless embedded system.
It is powered by the NVIDIA® JetsonTM NX, TX2 NX, or Nano modules. Uranus can run multiple neural networks and process
multiple high-resolution images at the same time.
1.1 Features and key benefits of Uranus
• Uranus has a compact and fanless design, so it is easy to deploy indoors and outdoors.
• It has a GPU-accelerated platform that is compatible with a range of modules (Xavier™ NX, TX2 NX, and Nano).
• As a lightweight all-in-one solution, Uranus is easy to deploy with minimal labor costs and fully-integrated hardware
and software.
• It operates multiple neural networks and can process several high-resolution images concurrently.
1.2 Specifications of Uranus
Processor NVIDIA Jetson Xavier NX 16GB/ TX2 NX/ Nano
BSP JetPack
Power input 12V DC input with 2-pin Terminal block
General
Certification CE, FCC
Display 1 x HDMI 2.0 Type A
1 x 0.96” OLED
Ethernet 1 x RJ45 GbE (10/100/1000)
Tact switch 1 x Recovery
1 x Reset
1 x GPIO
USB 2 x USB3.2 Gen1 Type A (5Gbps total)
1 x USB2.0 Type C (OTG only)
SD card 1 x micro SD
4-pin header 1 x fan connector
Physical I/O
Power LED 1 x Power LED indicator
Expansion slot 1 x Mini PCIe (USB2.0/SATA/PCIe) (full size/half size)Expansion
SIM card 1 x Nano SIM slot
Operating temperature −25°C - +60°CEnvironment
Storage temperature –40°C - +85°C
About Uranus 9

Storage humidity 95% @ 40 °C (non-condensing)
Dimension 150 × 110 × 60mm (L x W x H)
Weight 0.9kg
Mechanical
Installation Wall mount
1.3 Block diagram
The following figure show the main components of Uranus.
1.4 Layout
The following figure shows the layout of Uranus from the top, front, and side views.
About Uranus 10
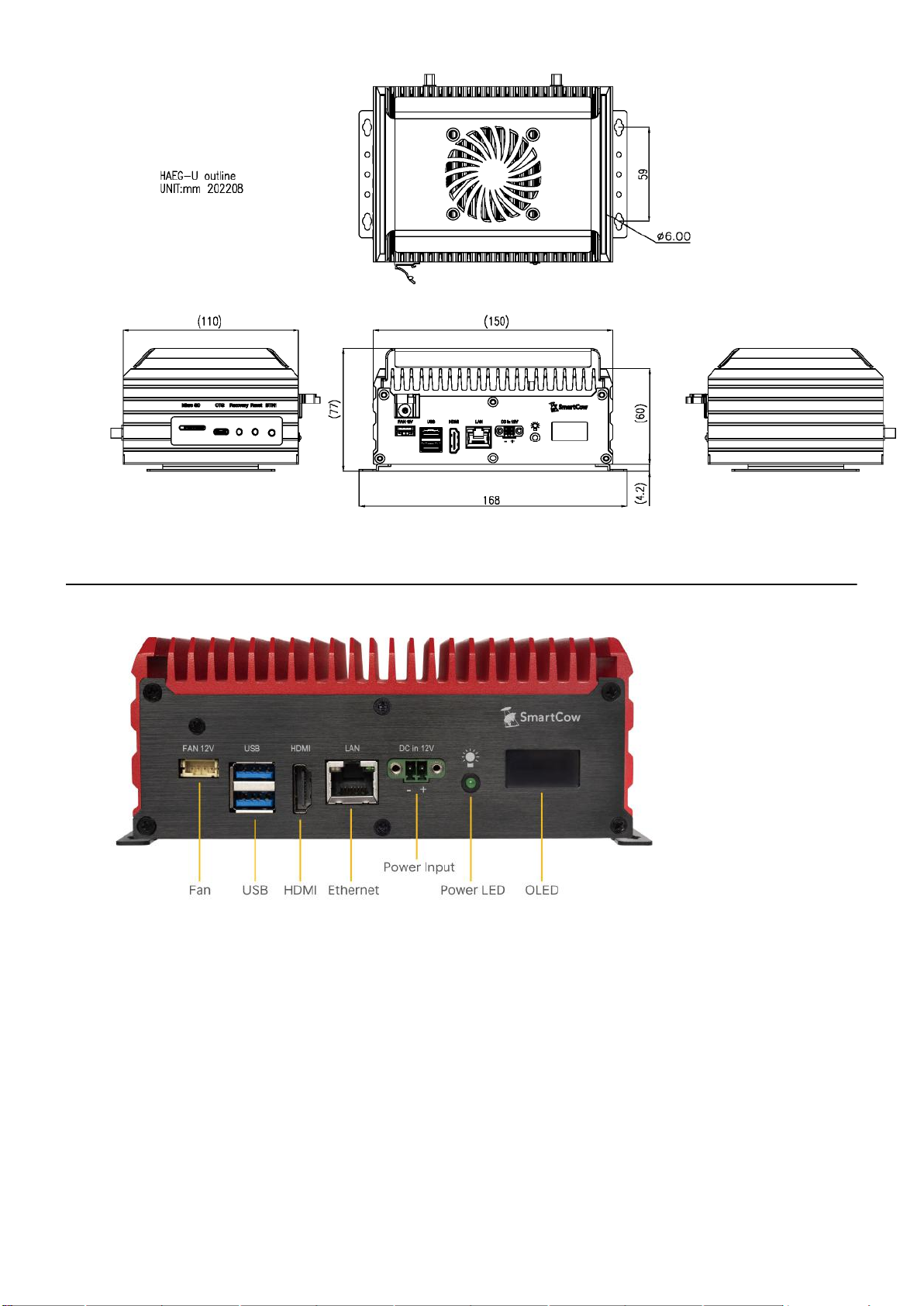
1.5 I/O ports, pins, and switches
The following photographs show where you can find the I/O ports, pins, and switches on Uranus.
Figure 1: Front of Uranus
About Uranus 11

Figure 2: Back of Uranus
Figure 3: Side of Uranus
About Uranus 12
Ordering information 2
Topics:
•Uranus package contents
•Compatible Jetson modules
These are the contents of the Uranus package, as well as the part numbers to use when ordering.
Model name Description
HAEGU-XN16 AI embedded system with Jetson Xavier NX 16G, 12V DC, including 60W 12V adapter
HAEGU-TN04 AI embedded system with Jetson TX2 NX, 12V DC, including 60W 12V adapter
HAEGU-NN04 AI embedded system with Jetson Nano, 12V DC, including 60W 12V adapter
2.1 Uranus package contents
Packaging list
Item Decsription Quantity
HAEGU AI embedded system with NVIDIA Jetson module 1
Power adapter DC 12V/5A, Terminal block 1
Screw Mini PCIe screw 2
Standoff Mini PCIe standoff 2
Wall mount
Uranus comes with a wall mount bracket. To use the wall mount bracket, you need four M3 size screws that are at least
6mm in length. There is no installation height limit.
Accessories list (optional)
Part number Description
1Y0701800200LI US power cord
1Y0701800100LI EU power cord
51-U0000000004 Quectel EP06 Series (LTE Cat.6)
61-UAN00005RAR
1Y0801000010AR
LTE antenna and coaxial cable (Usage: 2)
51-U0000000000 mSATA 128G
51-U0000000005 JJPlus Wi-Fi module
61-UAN00003RAR
1Y0801000000AR
Wi-Fi antenna and coaxial cable (Usage: 2)
Fan kit
2.2 Compatible Jetson modules
These are the Jetson modules that are compatible with Uranus.
Ordering information 13

Xavier NX 16GB TX2 NX Nano
CPU 6-core NVIDIA Carmel
ARM®v8.2 64-bit CPU 6MB
L2 + 4MB L3 processor
Dual-Core NVIDIA Denver 2
64- Bit CPU
Quad-Core Arm® Cortex®-
A57 MPCore processor
Quad-core ARM Cortex-A57
MPCore processor
GPU NVIDIA VoltaTM
architecture with 384
NVIDIA CUDA® cores and
48 Tensor cores
NVIDIA PascalTM
Architecture GPU with 256
CUDA cores
NVIDIA Maxwell
architecture with 128
NVIDIA CUDA cores
Memory 16GB 128-bit LPDDR4x @
59.7GB/s
4GB 128-bit LPDDR4 @
51.2GBs
4GB 64-bit LPDDR4 @
25.6GB/s
Storage 16GB eMMC 5.1
Ordering information 14

Testing the OLED of Uranus 3
Topics:
•Downloading the OLED demo files for Uranus
•Testing the OLED of Nano eMMC-based devices
•Testing the OLED of TX2 NX eMMC-based devices
•Testing the OLED of Xavier NX eMMC-based devices
About this task
3.1 Downloading the OLED demo files for Uranus
About this task
Before you begin OLED testing, download the OLED demo files.
Procedure
1. Download the zip folder contaning the demo files using the following link.
https://smartcow-general-public.s3.us-east-2.amazonaws.com/BSPs/Gaia/oled_test.7z
2. Extract the contents of the folder.
3. Follow the instructions to display an animated gif on your device.
3.2 Testing the OLED of Nano eMMC-based devices
Procedure
1. Download the luma example, and then run the following commands.
cd oled_test
git clone https://github.com/rm-hull/luma.examples.git
git clone --depth 1 --branch 3.8.1 https://github.com/rm-hull/luma.oled.git
git clone --depth 1 --branch 2.3.1 https://github.com/rm-hull/luma.core.git
sudo cp -r luma.oled/luma/ luma.examples/examples/
sudo cp -r luma.core/luma/core/ luma.examples/examples/luma/
sudo rm -r luma.oled/ luma.core/
Testing the OLED of Uranus 15

2. Install the dependency by running the following commands.
sudo sed -i "s/#deb/deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
sudo apt update
sudo apt install python3-pip
sudo apt-get install libjpeg-dev zlib1g-dev libfreetype6-dev libavformat-dev libavdevice-dev
python3 -m pip install --upgrade setuptools
python3 -m pip install -r requirements.txt
sudo sed -i "s/deb/#deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
3. Change the settings by running these commands.
sudo cp animated_gif_sc.py luma.examples/examples/
sudo cp OLED-Welcome.gif luma.examples/examples/images/
sudo sed -i "/(128, 64): dict(multiplex=0x3F, displayclockdiv=0x80, compins=0x12),/a\ (128,
40): dict(multiplex=0x27, displayclockdiv=0x80, compins=0x12)," luma.examples/examples/luma/
oled/device/__init__.py
4. Run the OLED.
cd luma.examples/
sudo python3 examples/animated_gif_sc.py --spi-port 1 --spi-device 1 --interface spi --gpio
Jetson.GPIO --gpio-mode Jetson.GPIO.BOARD --gpio-data-command 32 --gpio-reset 31 --gpio-reset-
hold-time 0.1 --width 128 --height 40
Note: To run scripts from the examples folder, you may need to manually install their dependencies.
3.3 Testing the OLED of TX2 NX eMMC-based devices
Procedure
1. Download the luma example using the following commands.
cd oled_test
git clone https://github.com/rm-hull/luma.examples.git
git clone --depth 1 --branch 3.8.1 https://github.com/rm-hull/luma.oled.git
git clone --depth 1 --branch 2.3.1 https://github.com/rm-hull/luma.core.git
sudo cp -r luma.oled/luma/ luma.examples/examples/
sudo cp -r luma.core/luma/core/ luma.examples/examples/luma/
sudo rm -r luma.oled/ luma.core/
Testing the OLED of Uranus 16
2. Install the dependency.
sudo sed -i "s/#deb/deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
sudo apt update
sudo apt install python3-pip
sudo apt-get install libjpeg-dev zlib1g-dev libfreetype6-dev libavformat-dev libavdevice-dev
python3 -m pip install --upgrade setuptools
python3 -m pip install -r requirements.txt
sudo sed -i "s/deb/#deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
3. Change the settings.
sudo cp animated_gif_sc.py luma.examples/examples/
sudo cp OLED-Welcome.gif luma.examples/examples/images/
sudo sed -i "/(128, 64): dict(multiplex=0x3F, displayclockdiv=0x80, compins=0x12),/a\ (128,
40): dict(multiplex=0x27, displayclockdiv=0x80, compins=0x12)," luma.examples/examples/luma/
oled/device/__init__.py
4. Run the OLED.
cd luma.examples/
sudo python3 examples/animated_gif_sc.py --spi-port 1 --spi-device 0 --interface spi --gpio
Jetson.GPIO --gpio-mode Jetson.GPIO.BOARD --gpio-data-command 32 --gpio-reset 31 --gpio-reset-
hold-time 0.1 --width 128 --height 40
Note: To run scripts from the examples folder, you may need to manually install their dependencies.
3.4 Testing the OLED of Xavier NX eMMC-based devices
Procedure
1. Download the luma example using the following commands.
cd oled_test
git clone https://github.com/rm-hull/luma.examples.git
git clone --depth 1 --branch 3.8.1 https://github.com/rm-hull/luma.oled.git
git clone --depth 1 --branch 2.3.1 https://github.com/rm-hull/luma.core.git
sudo cp -r luma.oled/luma/ luma.examples/examples/
sudo cp -r luma.core/luma/core/ luma.examples/examples/luma/
sudo rm -r luma.oled/ luma.core/
Testing the OLED of Uranus 17

2. Install the dependency.
sudo sed -i "s/#deb/deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
sudo apt update
sudo apt install python3-pip
sudo apt-get install libjpeg-dev zlib1g-dev libfreetype6-dev libavformat-dev libavdevice-dev
python3 -m pip install --upgrade setuptools
python3 -m pip install -r requirements.txt
sudo sed -i "s/deb/#deb/g" /etc/apt/sources.list.d/nvidia-l4t-apt-source.list
3. Change the settings.
sudo cp animated_gif_sc.py luma.examples/examples/
sudo cp OLED-Welcome.gif luma.examples/examples/images/
sudo sed -i "/(128, 64): dict(multiplex=0x3F, displayclockdiv=0x80, compins=0x12),/a\ (128,
40): dict(multiplex=0x27, displayclockdiv=0x80, compins=0x12)," luma.examples/examples/luma/
oled/device/__init__.py
4. Run OLED.
cd luma.examples/
sudo python3 examples/animated_gif_sc.py --spi-port 2 --spi-device 0 --interface spi --gpio
Jetson.GPIO --gpio-mode Jetson.GPIO.BOARD --gpio-data-command 32 --gpio-reset 31 --gpio-reset-
hold-time 0.1 --width 128 --height 40
Note: To run scripts from the examples folder, you may need to manually install their dependencies.
Testing the OLED of Uranus 18

Flashing your firmware 4
Topics:
•Putting your device into recovery mode
•Flashing firmware for Nano eMMC
•Flashing firmware for TX2 NX eMMC
•Flashing firmware for Xavier NX eMMC
4.1 Putting your device into recovery mode
There are two ways to set Uranus to recovery mode.
Before you begin
• Prepare one available PC that can meet the basic Ubuntu 18.04 hardware requirements.
• Use a USB type A to USB type C cable to connect the USB-C socket on device and connect the USB-A to PC.
Procedure
You can use one of the following methods to put your device into recovery mode.
• When the device is powered on, follow these steps.
a. Keep pressing the recovery button.
b. Press the reset button and then release it.
c. Release the recovery button.
• When the device is powered off, follow these steps.
a. Keep pressing the recovery button.
b. Power on the device.
c. Release the recovery button.
4.2 Flashing firmware for Nano eMMC
Follow these steps to flash the firmware for Nano eMMC-based devices.
Procedure
1. Extract the SmartCow Board Support Package (BSP) image.
tar xvjf <SmartCow_BSP_image_file_name>
2. Change the current working directory to the directory named mfi_jetson-nano-devkit-emmc.
cd mfi_jetson-nano-devkit-emmc
3. Connect the Jetson board to a host computer and enter the RCM mode on that board.
4. Flash the firmware of the Jetson device running the following command.
sudo ./nvmflash.sh
4.3 Flashing firmware for TX2 NX eMMC
Follow these steps to flash the firmware for TX2 NX eMMC-based devices.
Flashing your firmware 19
Procedure
1. Extract the SmartCow Board Support Package (BSP) image.
tar xvjf <SmartCow_BSP_image_file_name>
2. Change the current working directory to the directory named mfi_jetson-xavier-nx-devkit-tx2-nx.
cd mfi_jetson-xavier-nx-devkit-tx2-nx
3. Connect the Jetson board to a host computer and enter the RCM mode on that board.
4. Flash the firmware of the Jetson device running the following command.
sudo ./nvmflash.sh
4.4 Flashing firmware for Xavier NX eMMC
Follow these steps to flash the firmware for Xavier NX eMMC-based devices.
Procedure
1. Extract the SmartCow Board Support Package (BSP) image.
tar xvjf <SmartCow_BSP_image_file_name>
2. Change the current working directory to the directory named mfi_jetson-xavier-nx-devkit-emmc.
cd mfi_jetson-xavier-nx-devkit-emmc
3. Connect the Jetson board to a host computer and enter the RCM mode on that board.
4. Flash the firmware of the Jetson device running the following command.
sudo ./nvmflash.sh
Flashing your firmware 20
Table of contents
Popular Industrial PC manuals by other brands













Dell
Dell Embedded Box PC 5000 Installation and operation manual

IBASE Technology
IBASE Technology ASB200-918 Series user manual

Lenovo
Lenovo ThinkCentre M90q Hardware Maintenance Manual

IXXAT
IXXAT Econ 100 Hardware manual

Kontron
Kontron KBox A-151-TGL user guide

AXIOMTEK
AXIOMTEK ICO500-518 Series user manual