sparkfun JetBot AI Kit User manual

Assembly Guide for SparkFun JetBot AI Kit
Introduction
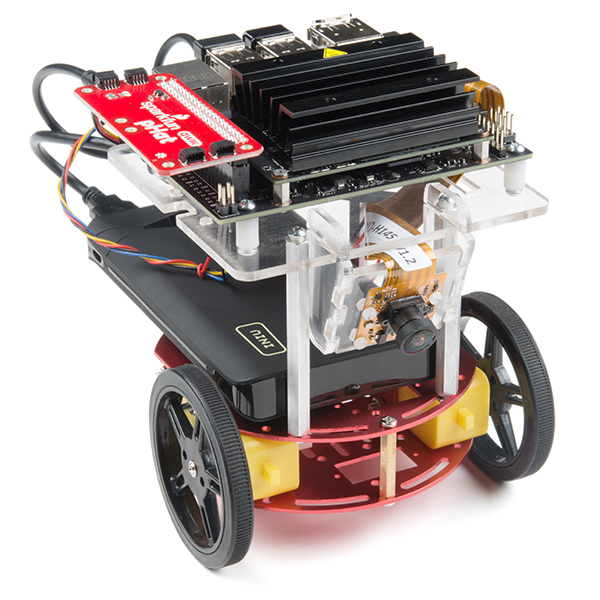
SparkFun’s version of the JetBot merges the industry leading machine learning capabilities of the NVIDIA Jetson
Nano with the vast SparkFun ecosystem of sensors and accessories. Packaged as a ready to assemble robotics
platform, the SparkFun JetBot Kit requires no additional components or 3D printing to get started - just assemble
the robot, boot up the Jetson Nano, connect to WiFi and start using the JetBot immediately. This combination of
advanced technologies in a ready-to-assemble package makes the SparkFun JetBot Kit a standout, delivering one
of the strongest robotics platforms on the market. This guide serves as hardware assembly instructions for the two
kits that SparkFun sells; Jetbot including Jetson Nano & the Jetbot add-on kit without the NVIDIA Jetson Nano.
The SparkFun JetBot comes with a pre-flashed micro SD card image that includes the Nvidia JetBot base image
with additional installations of the SparkFun Qwiic Python library, Edimax WiFi driver, Amazon Greengrass, and
the JetBot ROS. Users only need to plug in the SD card and set up the WiFi connection to get started.
Note: We recommend that you read all of the directions first, before building your Jetbot. However, we
empathize if you are just here for the pictures & a general feel for the SparkFun Jetbot. We are also those
people who on occasion void warranties & recycle unopened instructions manuals. However, SparkFun can
only provide support for the instructions laid out in the following pages.

Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules
installed (including the sample machine learning models needed for the collision avoidance and object
following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the
Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please
DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto
the card.
If you accidentally make this mistake, don't worry. You can find instructions for re-flashing our image back
onto the SD card in the software section of the guide
The Jetson Nano Developer Kit offers extensibility through an industry standard GPIO header and associated
programming capabilities like the Jetson GPIO Python library. Building off this capability, the SparkFun kit includes
the SparkFun Qwiic pHat for Raspberry Pi, enabling immediate access to the extensive SparkFun Qwiic
ecosystem from within the Jetson Nano environment, which makes it easy to integrate more than 30 sensors (no
soldering and daisy-chainable).
The SparkFun Qwiic Connect System is an ecosystem of I C sensors, actuators, shields and cables that make
prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST
connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up
wrong.
Materials
The SparkFun Jetbot Kit contains the following pieces; roughly top to bottom, left to right.
Part Qty
Circular Robotics Chassis Kit (Two-Layer) 1
Lithium Ion Battery Pack - 10Ah (3A/1A USB Ports) 1
2

Ball Caster Metal - 3/8" 1
Edimax 2-in-1 WiFi and Bluetooth 4.0 Adapter 1
Header - male - PTH - 40 pin – straight 1
2 in - 22 gauge solid core hookup wire (red) 1
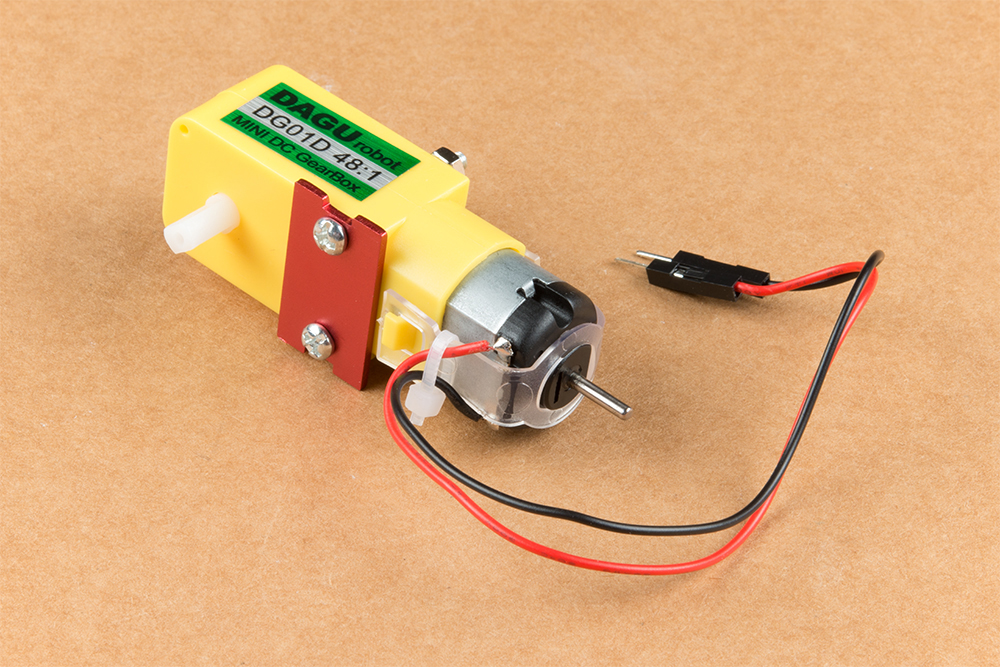
Shadow Chassis Motor (pair) 1
Jetson Dev Kit (Optional) 1
SparkFun JetBot Acrylic Mounting Plate 1
SparkFun Jetbot image (Pre Flashed) 1
Leopard Imaging 145 FOV Camera 1
Screw Terminals 2.54mm Pitch (2-Pin) 2
SparkFun Micro OLED Breakout (Qwiic) 1
SparkFun microB USB Breakout 1
SparkFun Serial Controlled Motor Driver 1
Breadboard Mini Self-Adhesive Red 1
SparkFun Qwiic HAT for Raspberry Pi 1
SparkFun JetBot Acrylic sidewall for camera mount 2
SparkFun JetBot Acrylic Camera mount & 4x nylon mounting hardware 1
Qwiic Cable - 100mm 1
Qwiic Cable - Female Jumper (4-pin) 1
Wheels & Tires - included as part of circular robotics chassis 2
USB Micro-B Cable - 6" 2
Dual Lock Velcro 1

The SparkFun Jetbot Kit contains the following hardware; roughly top to bottom, left to right.
Part Qty
Hex Standoff #4-40 Alum 2-3/8" 3
Standoff - Nylon (4-40; 3/8in.) 10
1/4" Phillips Screw with 4-40 Thread 20
Machine Screw Nut - 4-40 10
Circular Robotics Chassis Kit (Two-Layer) Hardware 1
Recommended Tools
We did not include any tools in this kit because if you are like us you are looking for an excuse to use the tools you
have more than needing new tools to work on your projects. That said, the following tools will be required to
assemble your SparkFun Jetbot.
Small phillips & small flat head head screwdriver will be needed for chassis assembly & to tighten the screw
terminal connections for each motor. We reccomend the Pocket Screwdriver Set; TOL-12268.
Pair of scissors will be needed to cut the adhesive Dual Lock Velcro strap to desired size; recommended,
but not essential..
Soldering kit for assembly & configuration of the SparkFun Serial Controlled Motor Driver - example TOL-
14681
Optional- adjustable wrench or pliers to hold small components (nuts & standoffs) in place while tightening
screws; your finger grip is usually enough to hold these in place while tightening screws & helps to ensure
nothing is over tightened.
A Note About Directions
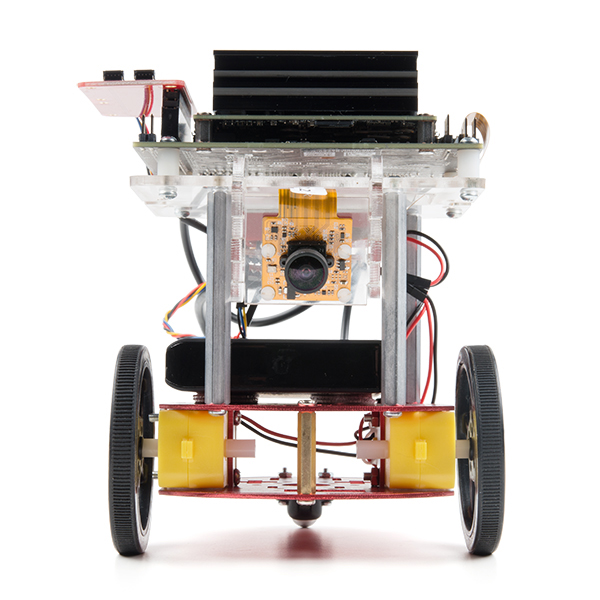
When we talk about the "front," or "forward" of the JetBot, we are referring to direction the camera is pointed when
the Jetbot is fully assembled. "Left" and "Right" will be from the perspective of the SparkFun Jetbot.

1. Circular Robotics Chassis Kit (Two-Layer) Assembly
If you prefer to follow along with a video, check out this feature from the chassis product page. You do not need to
use the included ball caster as a larger option has been provided for smoother operation.
Start by attaching the chassis motor mount tabs to each of the "Shadow Chassis Motors (pair)" using the long
threaded machine screws & nuts included with the Circular Robotics Chassis Kit.
Product Showcase: Circular Robotics Chassis AssemblyProduct Showcase: Circular Robotics Chassis Assembly

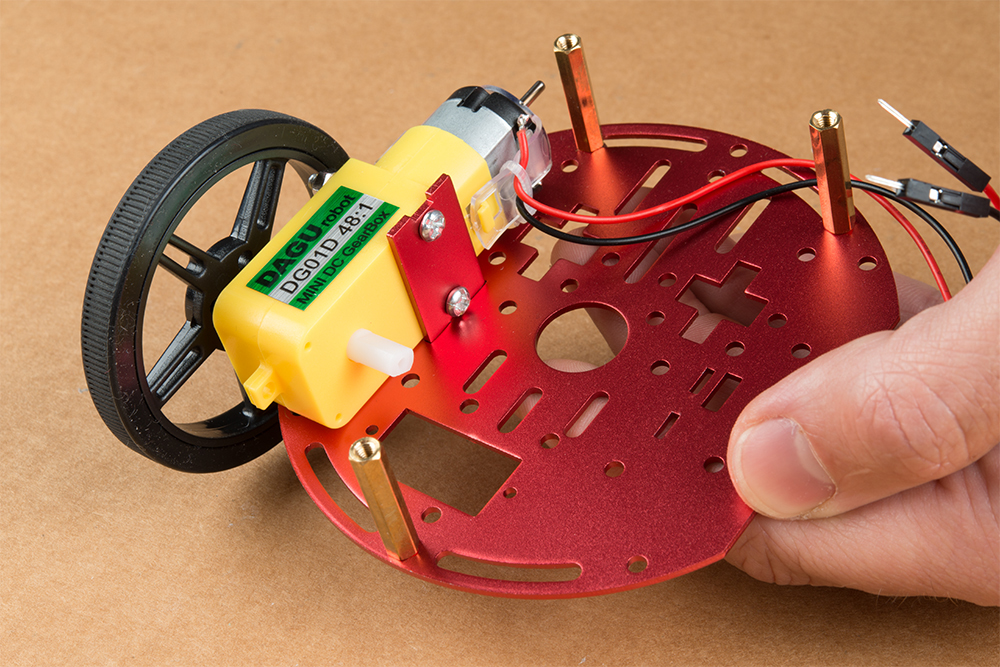
Fit the rubber wheels onto the hubs, install the wheel onto each motor, & fix them into position using the self
tapping screws included with the Circular Robotics Chassis Kit.
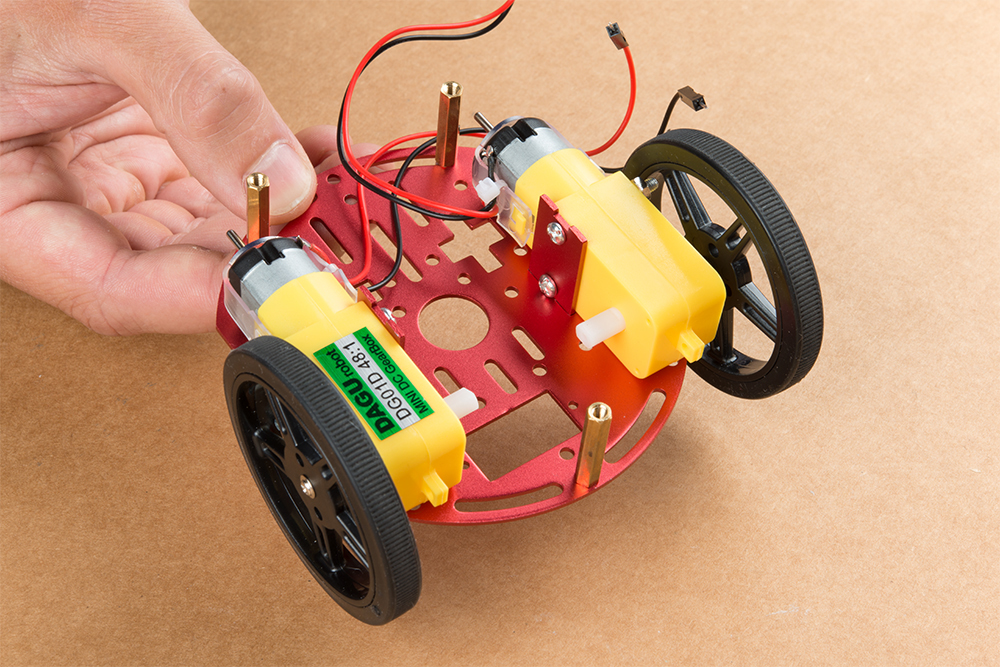
Install the brass colored standoffs included with the Circular Robotics Chassis Kit; two in the rear and one in the
front. The rear of the SparkFun Jetbot will be on the side of the plate with the two "+" sign cut outs. The rear of the
motor will be opposite the wheel where the spindle extends. This orientation ensures the widest base & most
stable set up for your Jetbot.
The motor mounts fit into two mirrored inlets in each base plate as shown. Install the motors opposite of one
another.

Depending on how you install the motor mounts to each motor will dictate how the motor can be installed on the
base plate. Note: Do not worry about the motor orientation as you will determine proper motor operation in
how you connect the motor leads to the SparkFun Serial Controlled Motor Driver. Notice how in the picture
below one motor has the label facing up, while the other has the label facing down.
Place the other circular robot chassis plate on top of and align the two "+" and the motor mount tab recesses. Hold
the sandwiched chassis together with one hand and install the remaining Phillips head screws included with the
Circular Robotics Chassis Kit through the top plate & into the threaded standoffs.
Your main chassis is now assembled! The Circular Robotics Chassis Kit also contains a very small caster wheel
assembly, but we have included a larger metal caster ball to increase the stability of the SparkFun Jetbot. We will
cover the installation of this caster ball later in the tutorial.
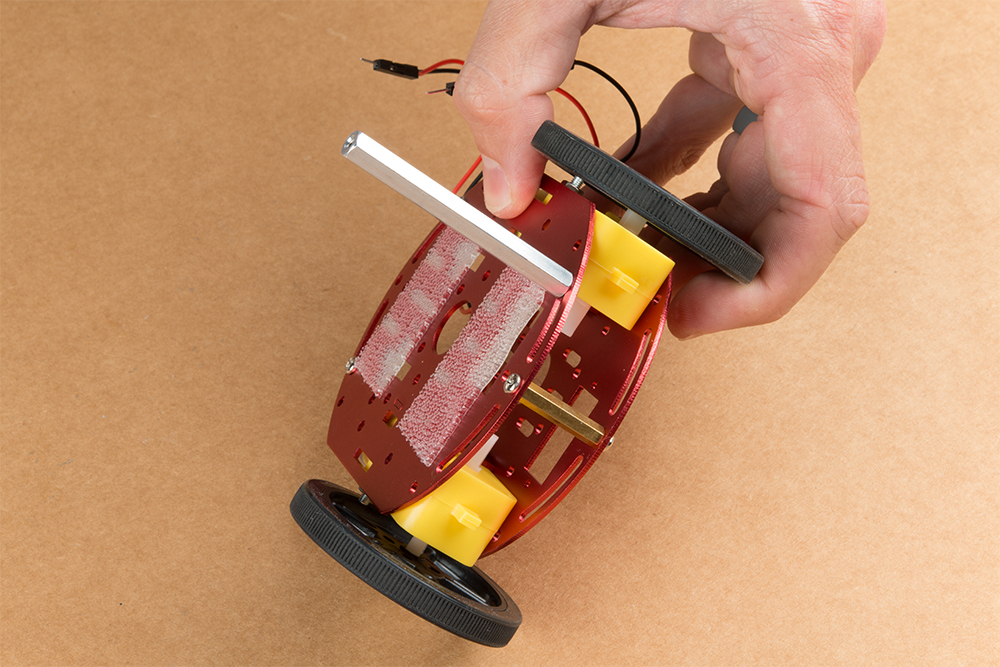
Utilize three of the included 1/4 in 4-40 Phillips Screws through the top chassis plate with threads facing up &
install the 2-3/8 in #4-40 Aluminum Hex Standoff until they are finger tight.

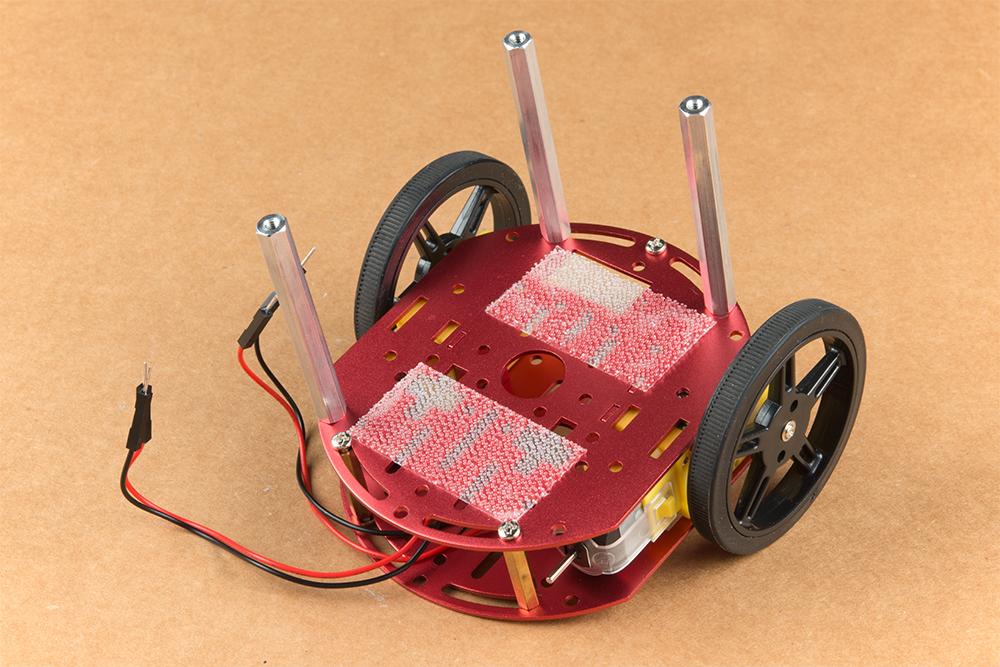
The aluminum stand offs should be pointing up as shown below.
The SparkFun JetBot acrylic mounting plate is designed to have two of these aluminum standoffs in the front &
one in the rear. We recommend the rear standoff on the left side of the chassis (as shown) so the 6 in microB usb
cables that will be installed later can more easily span the gap needed to power the JetBot.
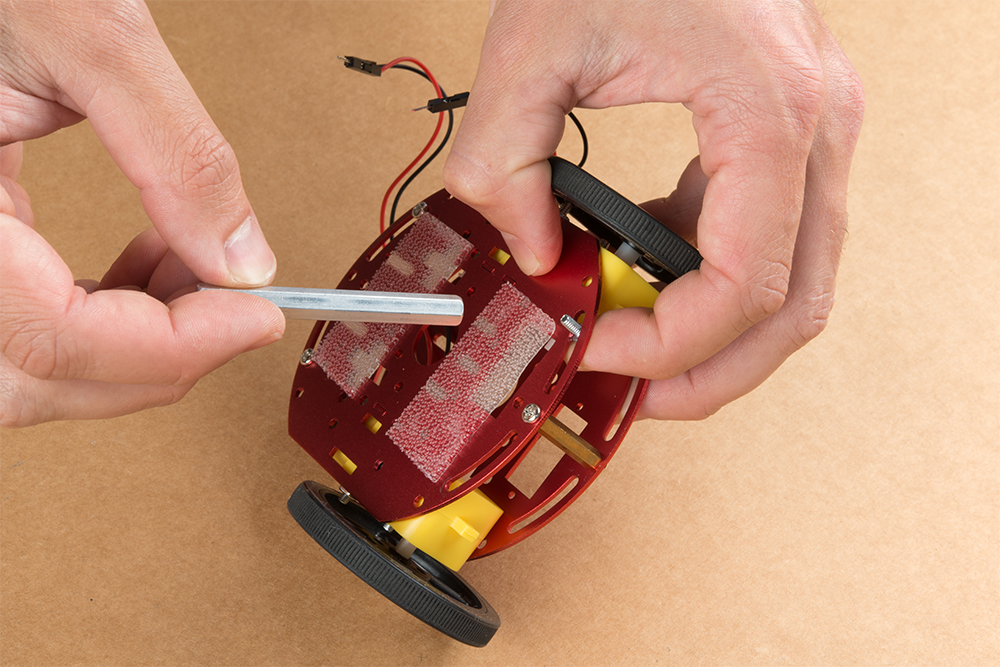
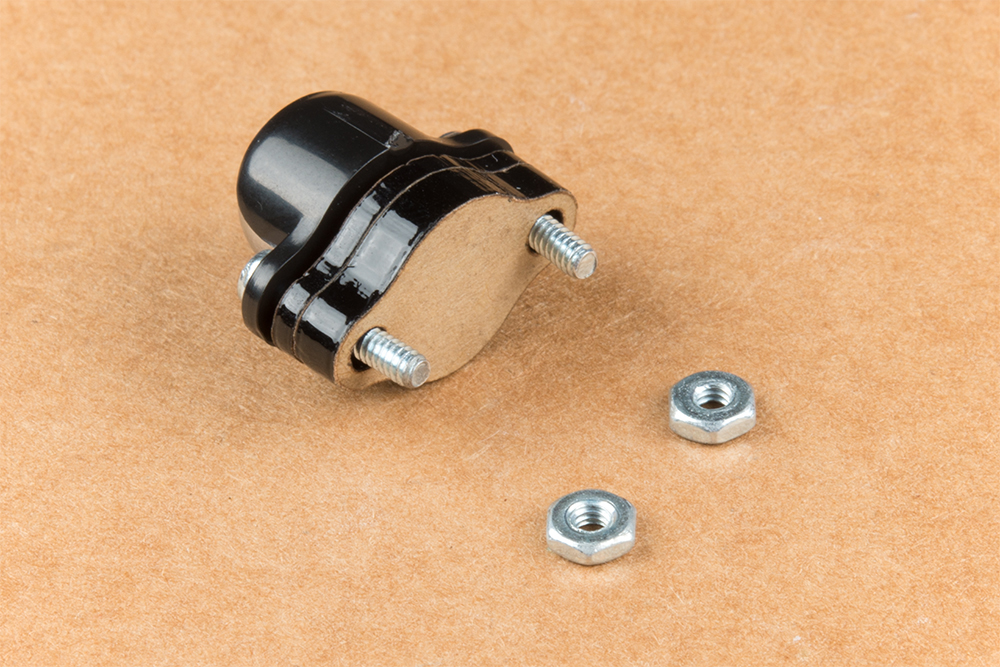
Un-package the 3/8 in Metal Caster Ball and thread the mounting screws through all pieces as shown. Note the
full stack height will help balance the Jetbot in a stable position.

Install the caster wheel using the Phillips head screws and nuts included with the 3/8 in caster ball assembly. The
holes on the caster assembly are spaced to fit snug on the innermost segment of the angular slots near the rear of
the lower plate on the JetBot chassis. Again, hand tight is just fine. Note: if you over tighten these screws it will
prevent the ball from easily rotating in the plastic assembly. However, too loose and it may un-thread; go
for what feels right
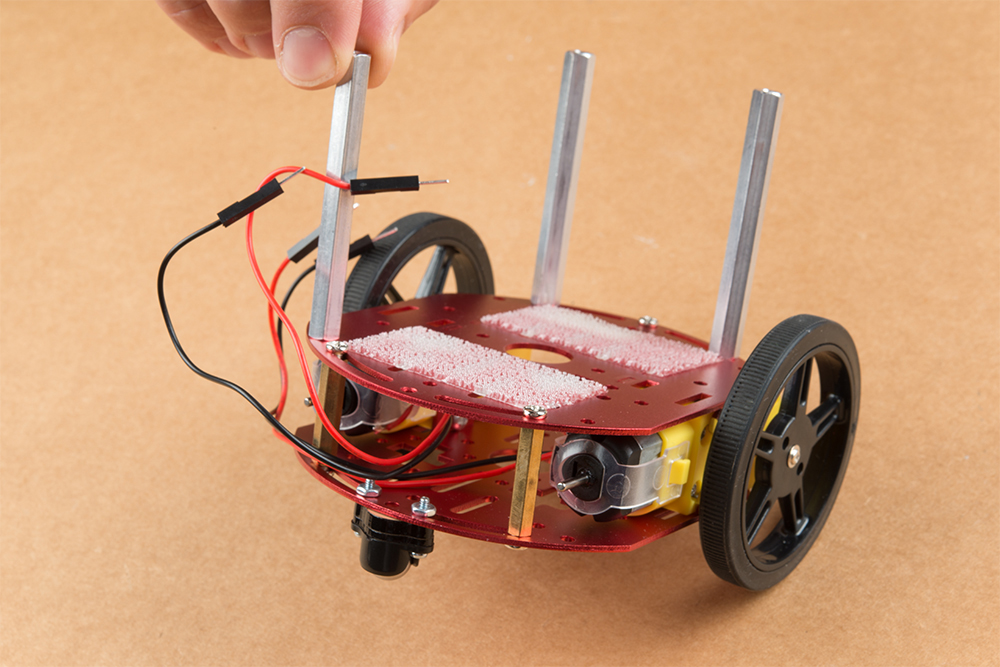
After you have installed the caster & aluminum standoffs, thread the motor wires through the back of the chassis
standoffs for use later.
2. Camera Assembly & Installation
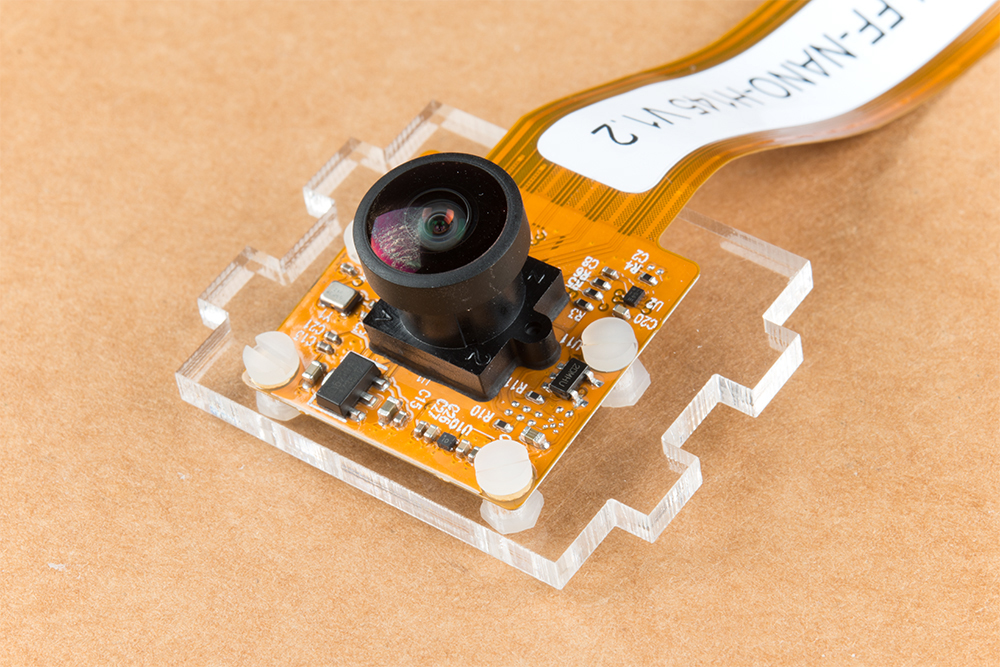
Unpackage the Leopard Imaging camera & align the four holes in the acrylic mounting plate with those on the
camera.
Note: ensure that the ribbon cable is extending over the acrylic plate on the edge that does not have
mounting holes near the edge; as shown below.

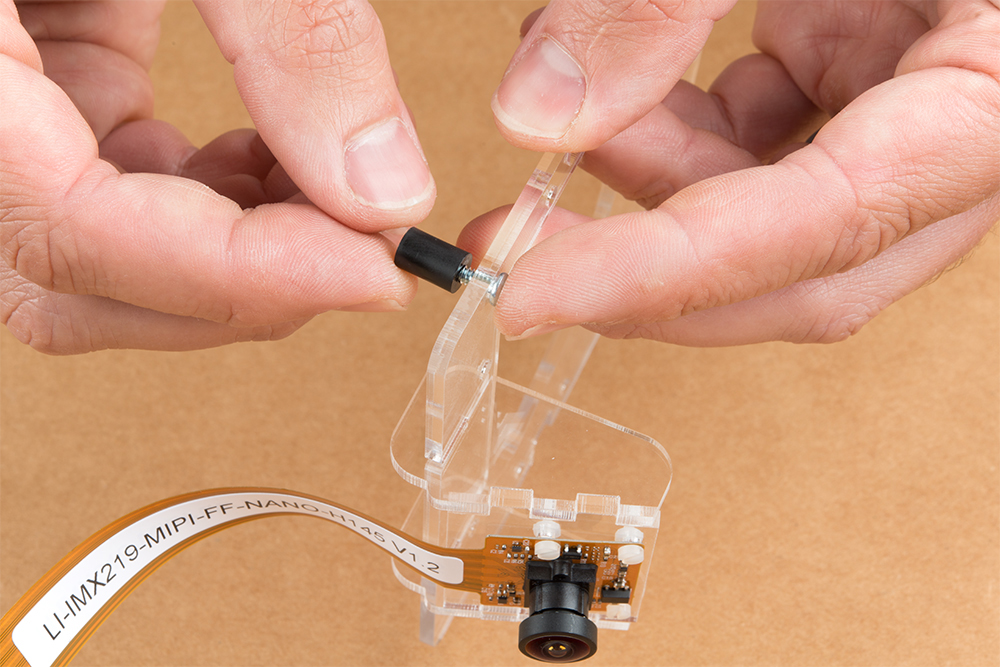
Place all four nylon flathead screws through the camera & acrylic mounting plate prior to fully tightening the nylon
nuts. This will ensure equal alignment across all four screws. Tighten the screws while holding the nuts with finger
pressure in a rotating criss cross pattern; similar to how you tighten lug nuts on a car rim.
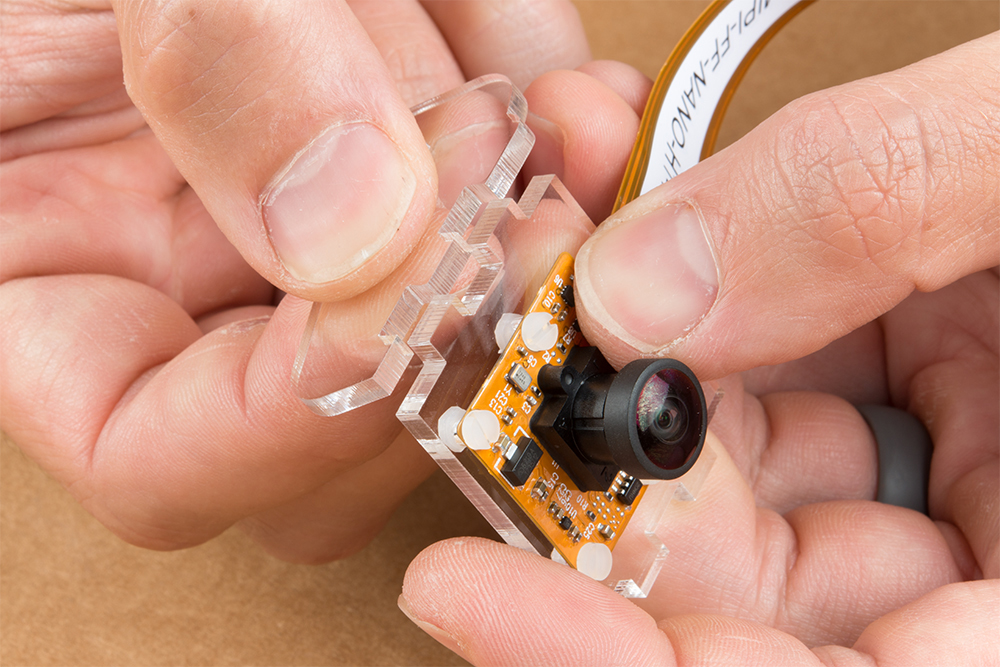
Align one acrylic sidewall with the camera mounting plate as shown below ensuring that the widest section of the
sidewall is oriented to the top of the camera mount where the ribbon cable extends.
Apply even pressure on each piece until they fit together. Note: these pieces are designed to have an
interference fit and will have a nice, satisfying "click" when they fit together.
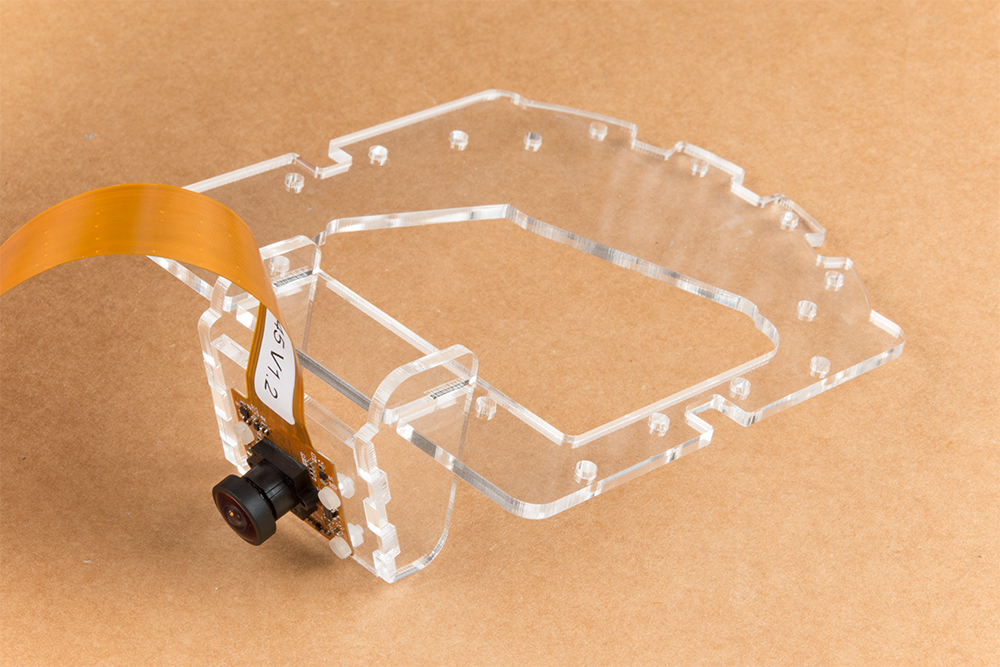
Repeat this process on the other side to fully assemble the camera mount.

The camera mount should now be installed to the SparkFun Jetbot acrylic mounting plate using the overlapping
groove joints. Ensure that the cut out on the acrylic mounting plate is facing towards the front/right of the Jetbot as
shown. This will ensure that there is plenty of room for the camera ribbon cable to pass around the assembly and
up to the Jetson nano camera connector.
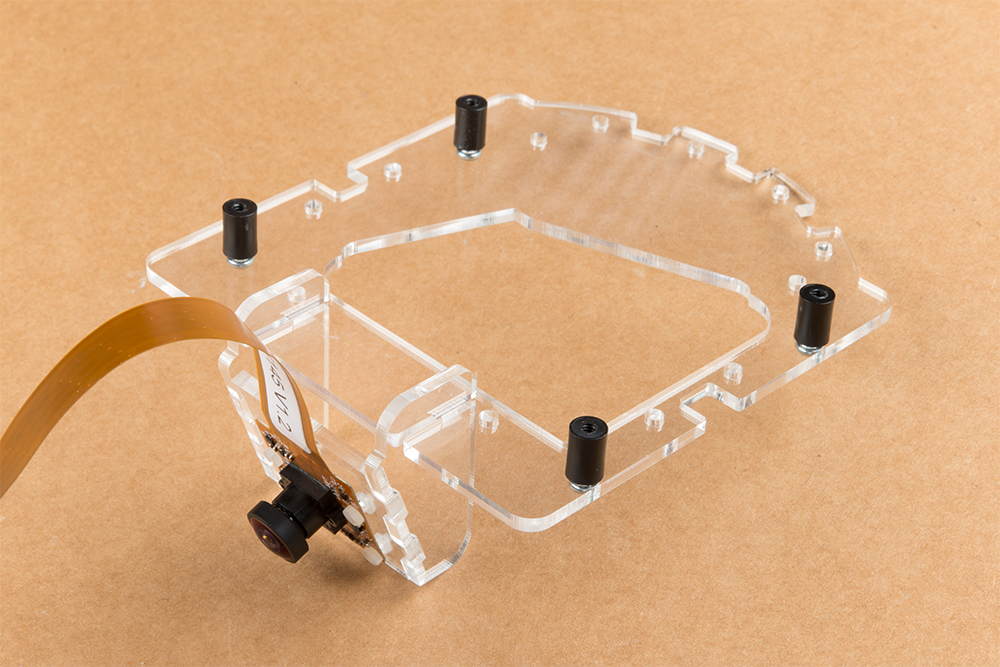
Install four of the nylon standoffs to the top of the SparkFun Jetbot acrylic mounting plate using four of the included
1/4 in 4-40 Phillips head screws as shown below.

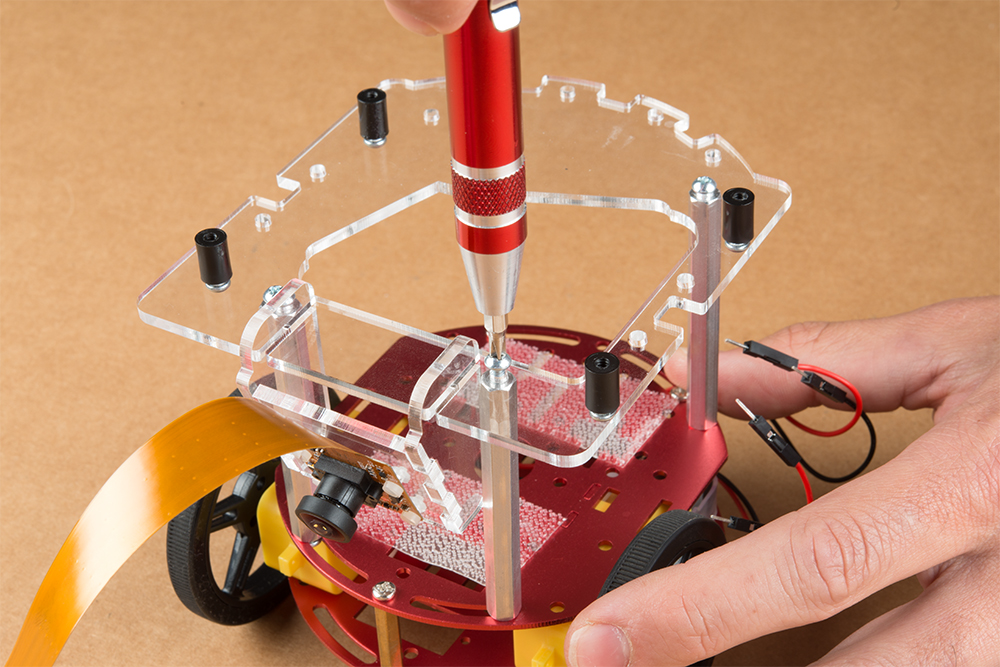
Utilize three more of the 1/4 in 4-40 Phillips head screws to install the SparkFun Jetbot acrylic mounting plate to
the aluminum standoffs extending from the Two-layer circular robotics chassis as shown below.
3. Motor Driver Assembly & Configuration
To get started, make sure that you are familiar with the SparkFun Serial Controlled Motor Driver Hookup Guide.
We also recommend a detailed review of the Hardware Overview of the SparkFun Serial Controlled Motor Driver
Here.
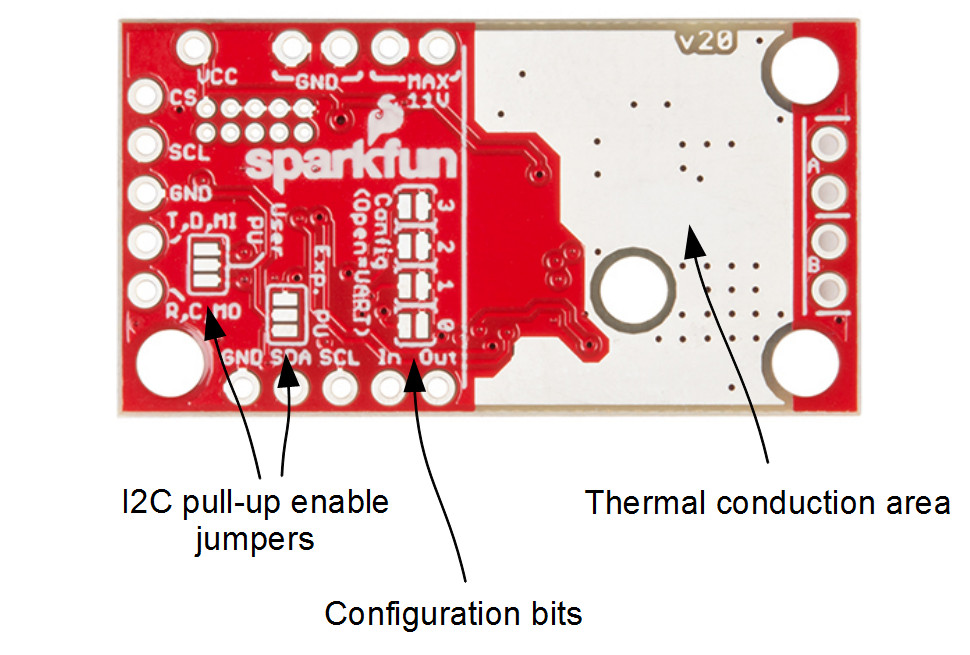
You will need to solder both triple jumpers labeled below as "I2C pull-up enable jumpers" as the SparkFun pHat
utilizes the I2C protocol. The default I2C address that is used by the pre-flashed SparkFun Jetbot image is 0x5D
which is equavalent to soldering pad #3 noted as "configuration bits" on the back of the SparkFun serial controlled
motor driver; see below. You will need to create a solder jumper on pad #3 only for the SparkFun Jetbot Image to
work properly.

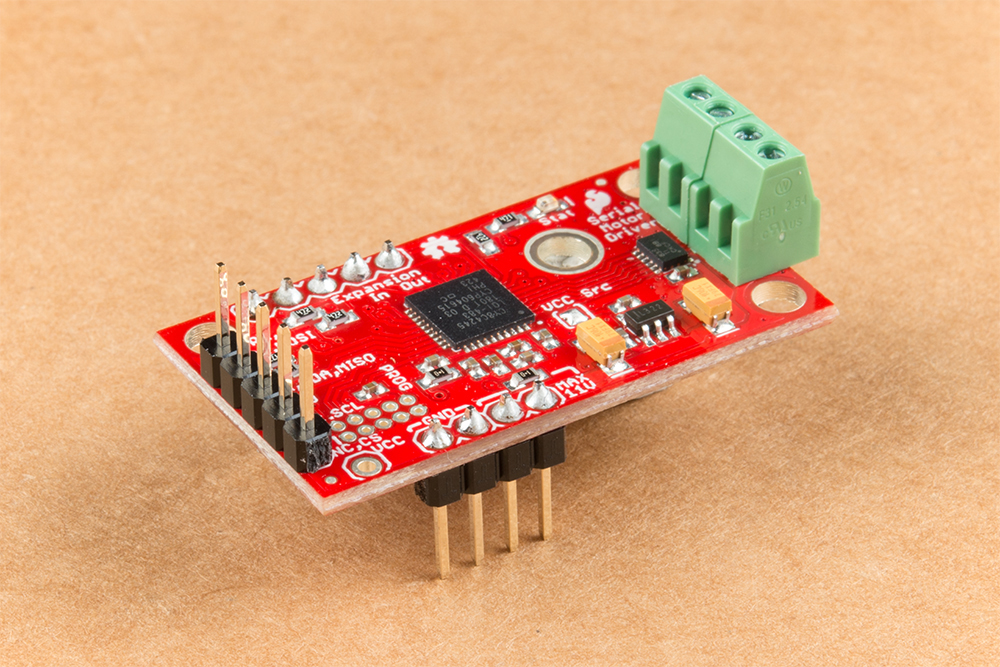
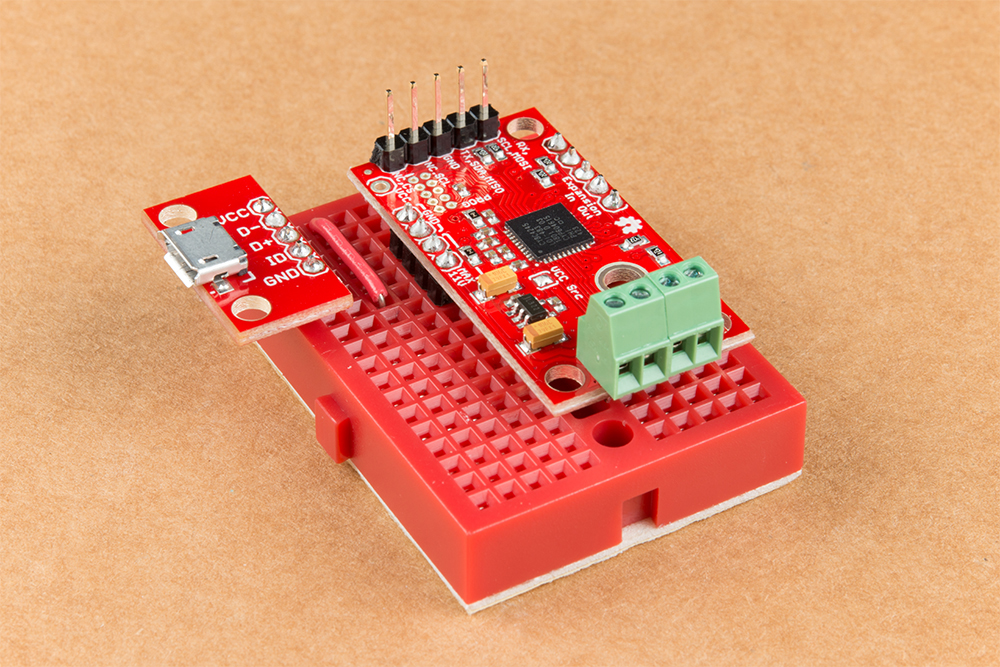
Your completed Serial Controlled motor drive should look somewhat similar to the board shown below.
The 2-pin screw terminals are soldered to the "Motor Connections."
Break off 4 Male PTH straight headers and solder into the "Power (VIN) connection" points.
Break off 5 Male PTH straight headers and solder into the "Expansion port" points. These will not be used,
but will provide additional board stability when installed into the mini breadboard.
Break off 5 Male PTH straight headers and solder into the "User port" points for connection into the included
Female Jumper Qwiic cables.
Break off 5 Male PTH straight headers and solder into the breakout points on the SparkFun microB USB Breakout.
Install both the SparkFun Serial Controlled Motor Driver & the SparkFun microB Breakout board on the included
mini breadboard so the "GRD" terminals for each unit share a bridge on one side of the breadboard.
Utilize the included 2 in - 22 gauge solid core hookup wire (red) to bridge the "VCC" pin for the SparkFun microB
Breakout to either (VIN) connection point on the SparkFun Serial Controlled Motor Driver as shown below.
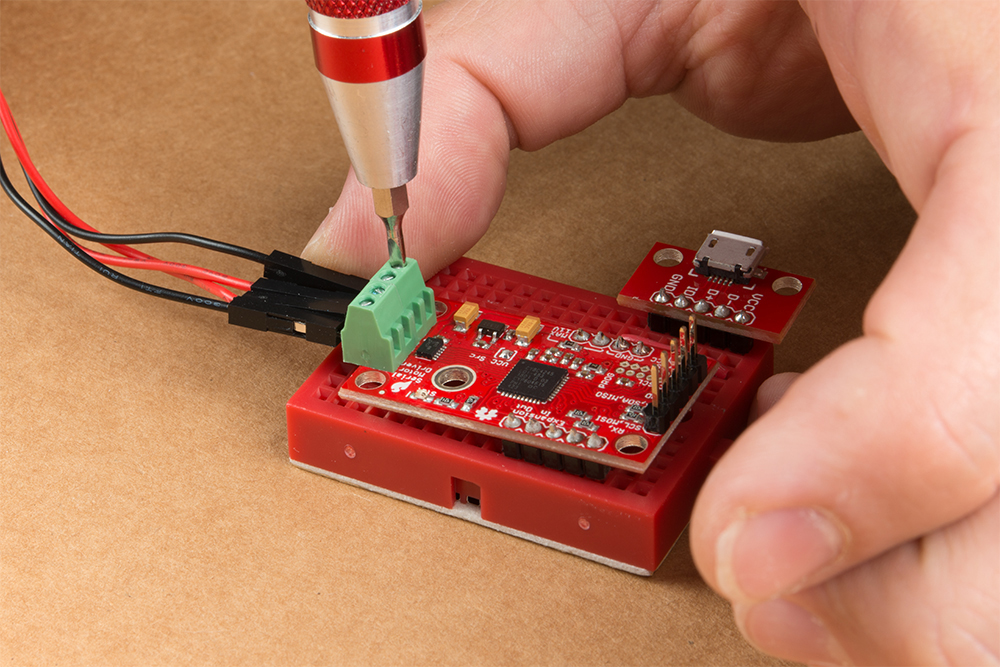
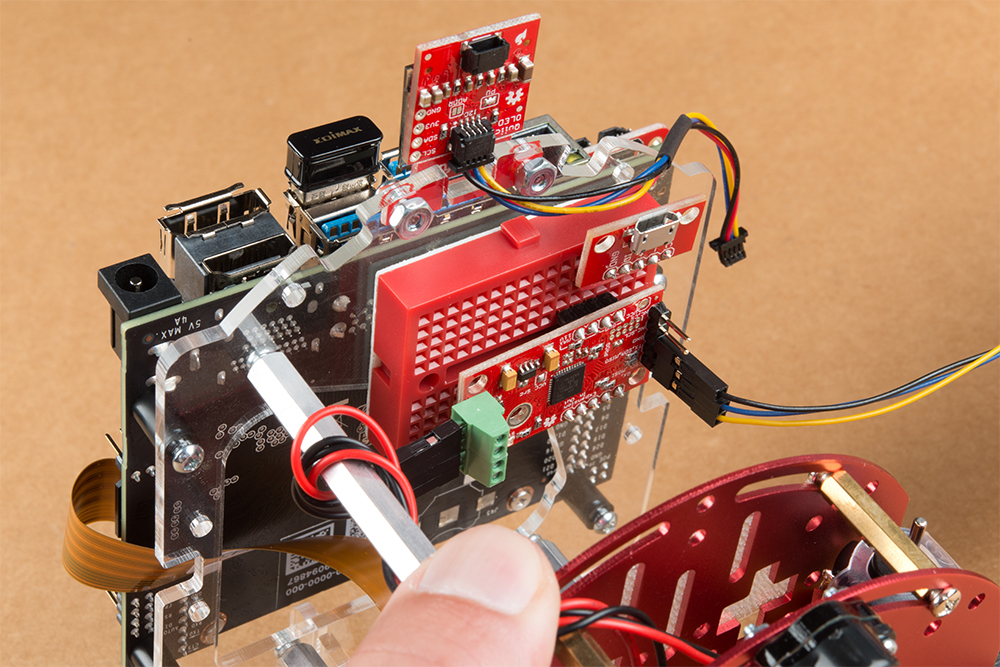
Utilize a small flat head screwdriver to loosen the four connection points on the screw terminals. When inserting
the motor connection wires, note the desired output given the caution noted in section #1 of this assembly guide.

Note from section #1: Do not worry about the motor orientation as you will determine proper motor
operation in how you connect the motor leads to the SparkFun Serial Controlled Motor Driver.
These connection points can be corrected when testing the robot functionality. If your Jetbot goes straight when
you expect Jetbot to turn or vice versa, your leads need to be corrected.
Set this assembly aside for full installation later.
4. Accessory Installation to Main Chassis
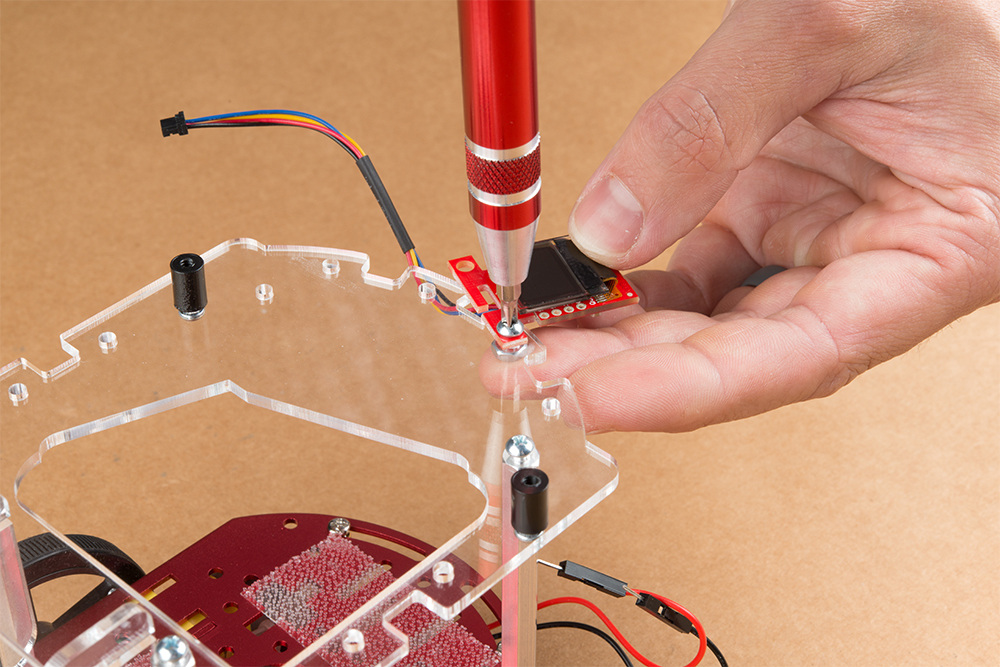
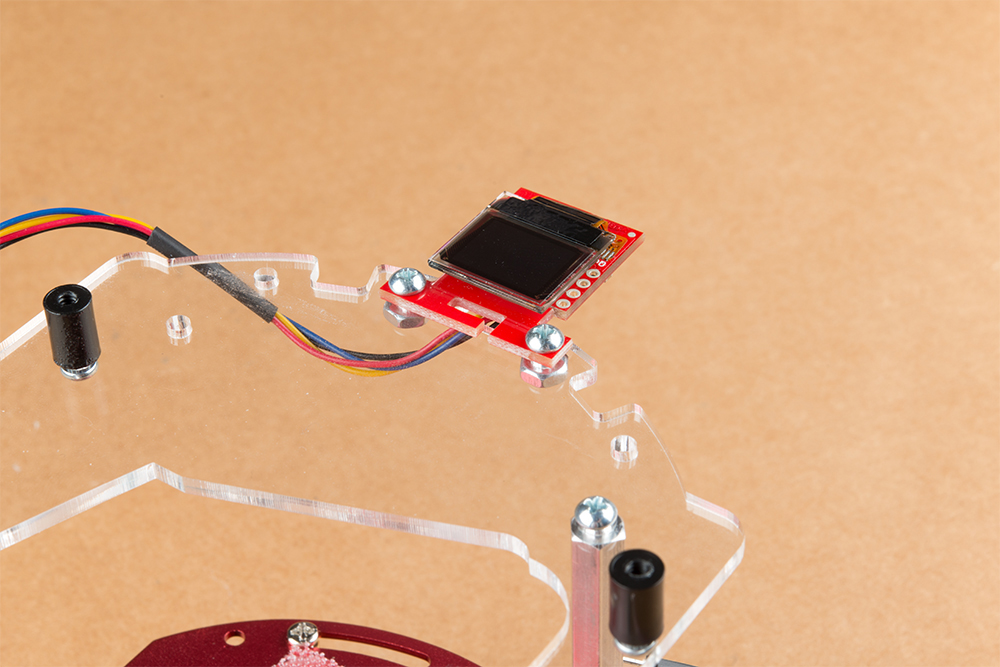
Align the mounting holes on the SparkFun Micro OLED (Qwiic) with those on the back of the SparkFun Jetbot
acrylic mounting plate. Install the Micro OLED using two 1/4 in 4-40 Phillips head screws and two 4-40 machine
screw nuts.
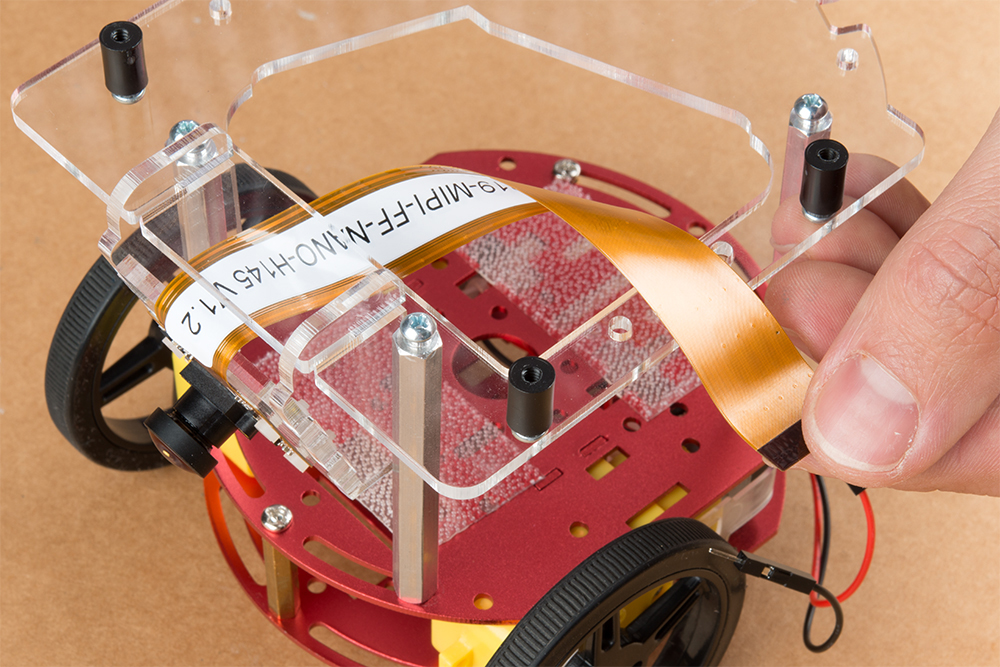
Thread the ribbon cable of the Leopard imaging camera back through the acrylic mounting plate and half-helix
towards the left side of the Jetbot.

Install the Jetson Nano Dev kit to the nylon standoffs using four 1/4 in 4-40 Phillips head screws. Tighten each
screw slightly in a criss-cross pattern to ensure the through holes do not bind during install until finger tight. Make
sure you can still access the camera ribbon cable.
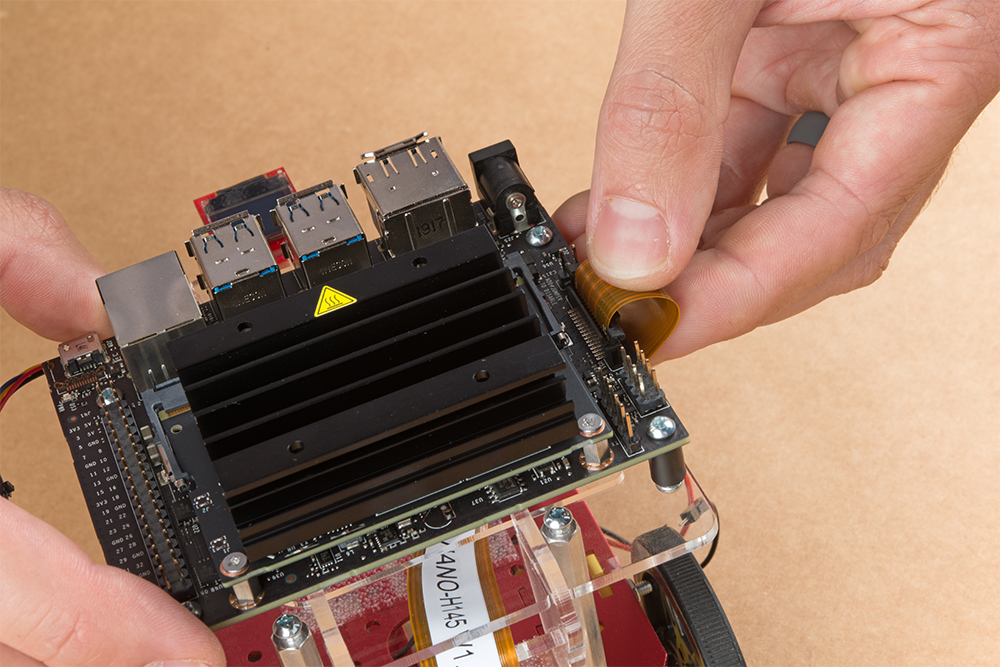
Note: the camera connector is made from small plastic components & can break easier than you think.
Please be careful with this next step.
Loosen the camera connector with a fingernail or small flathead screwdriver. Fit the ribbon cable into this
connector and depress the plastic press fit piece of the connector to hold the ribbon cable in place.
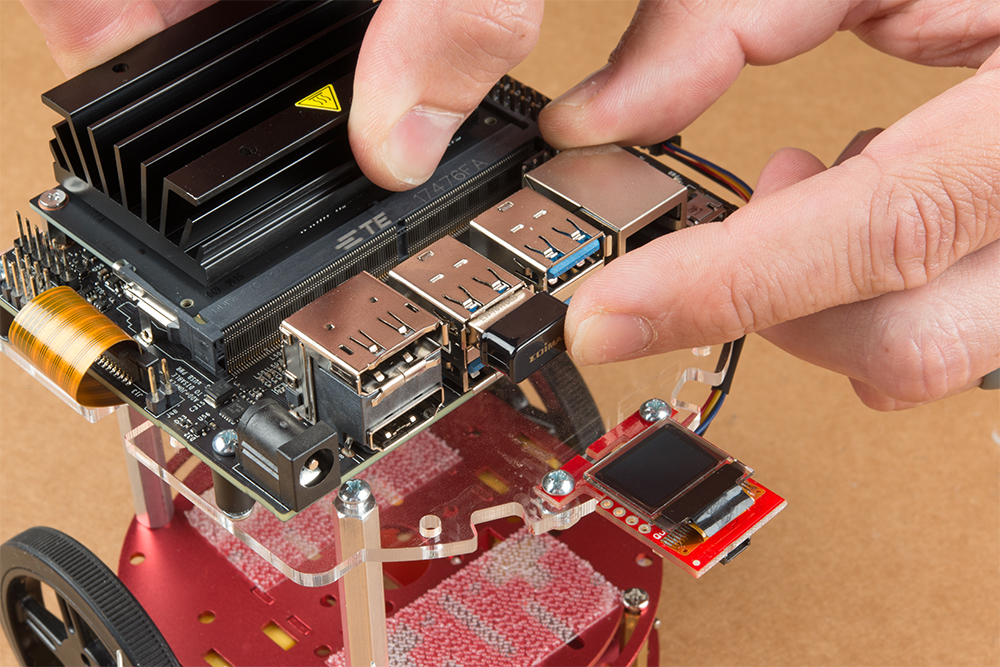
Unpackage & install the USB Wifi adaptor into one of the USB ports on the Jetson nano Dev Kit. The drivers for
this Wifi adaptor are pre-installed on the SparkFun Jetbot image. If you are making your own image, you will need
to ensure you get these from Edimax.

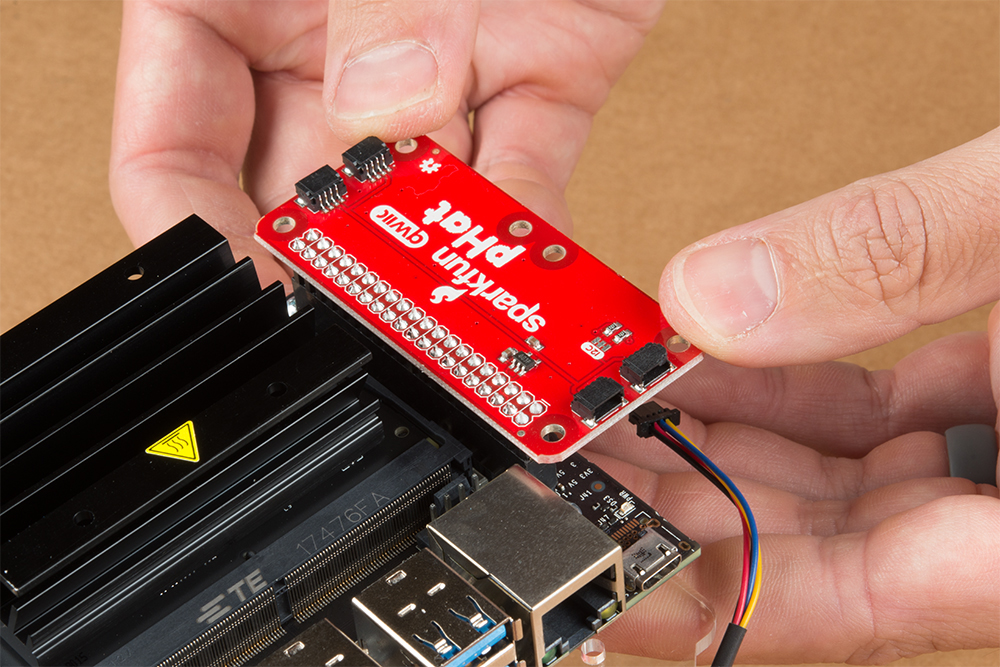
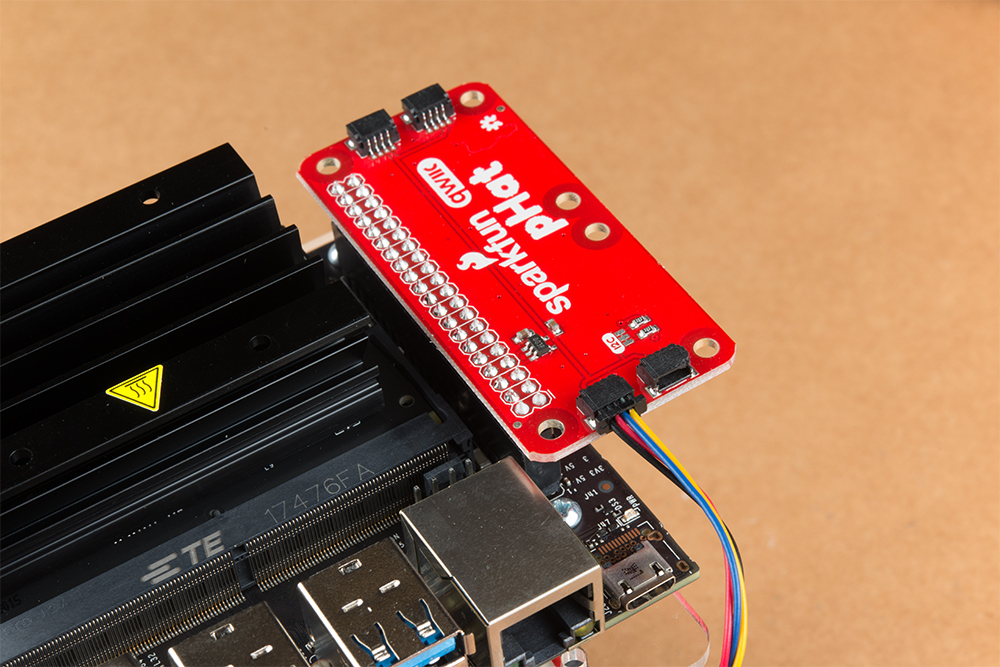
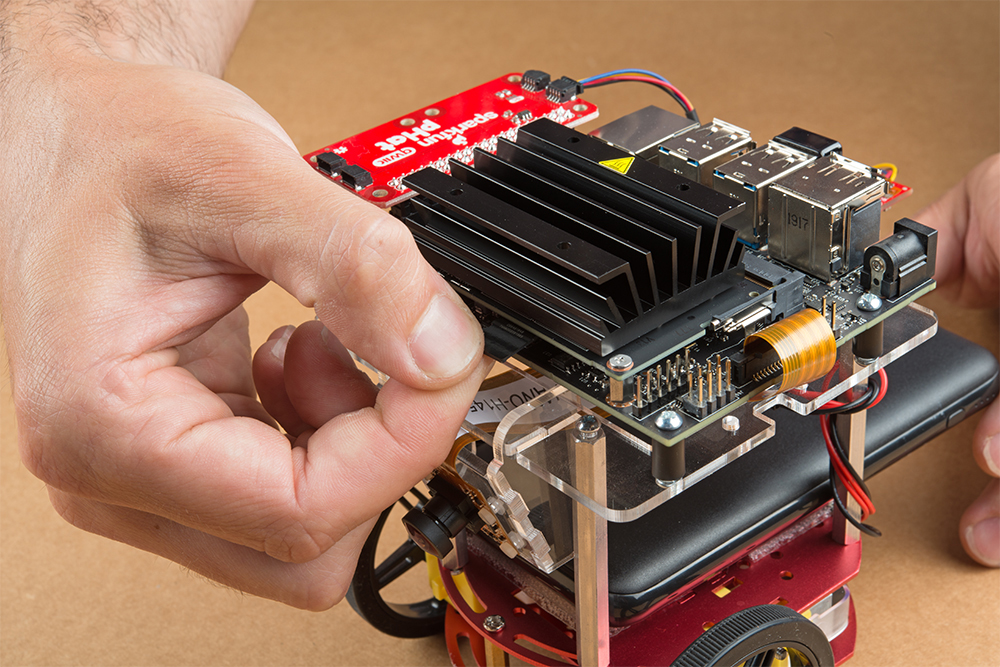
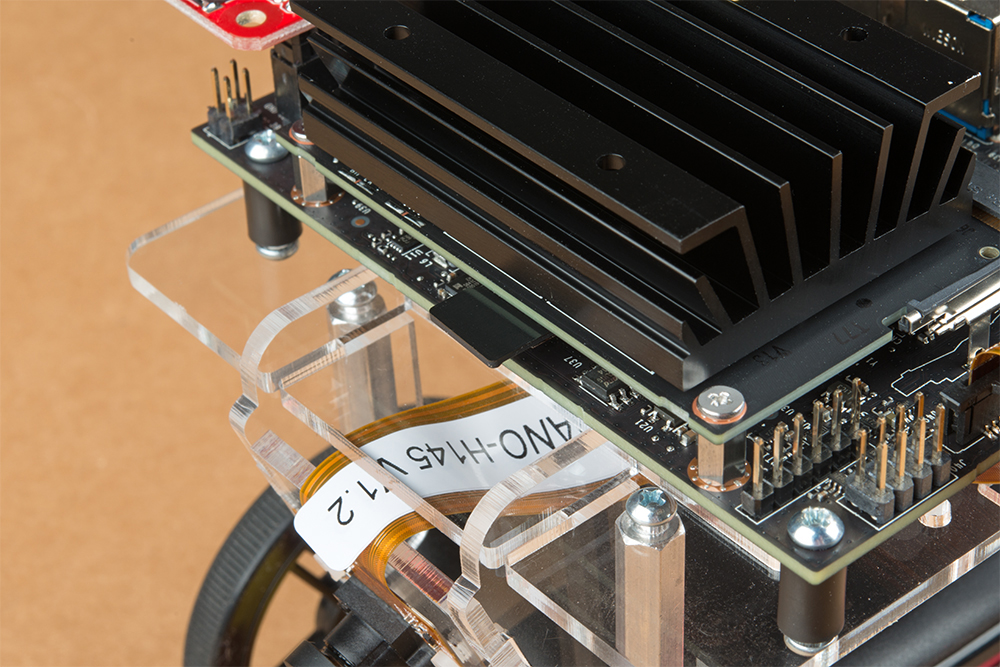
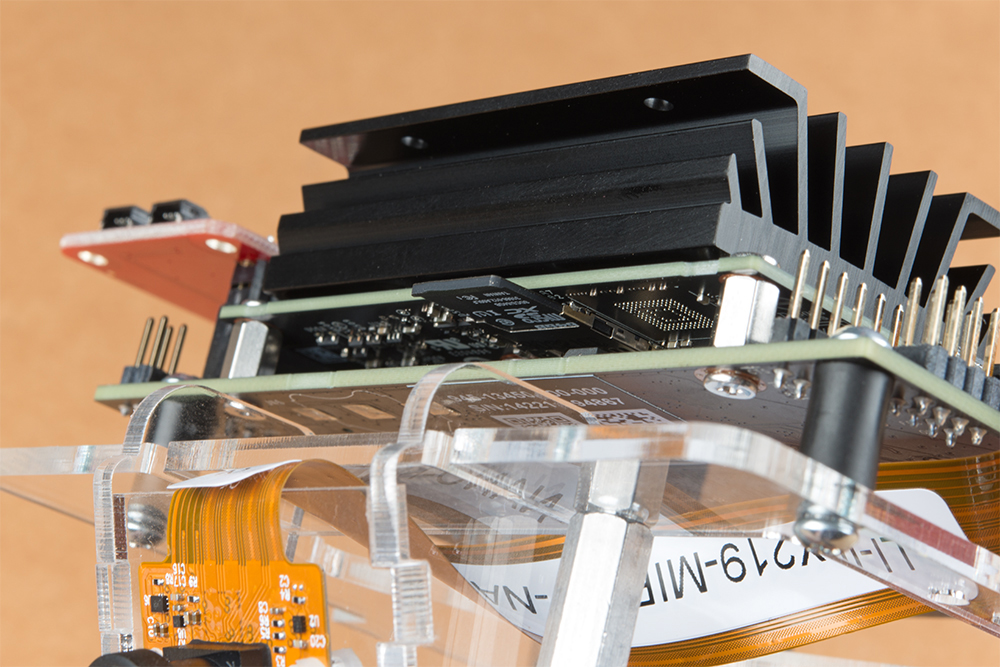
Align the SparkFun pHat with the GPIO headers on the Jetson Nano Dev Kit so that the pHat overhangs the right
hand side of the Jetbot. For additional information on hardware assembly of the SparkFun pHat, please reference
the hookup guide here.
Note: The heatsink on the Jetson Nano Dev Kit will only allow for one orientation of the SparkFun pHat.
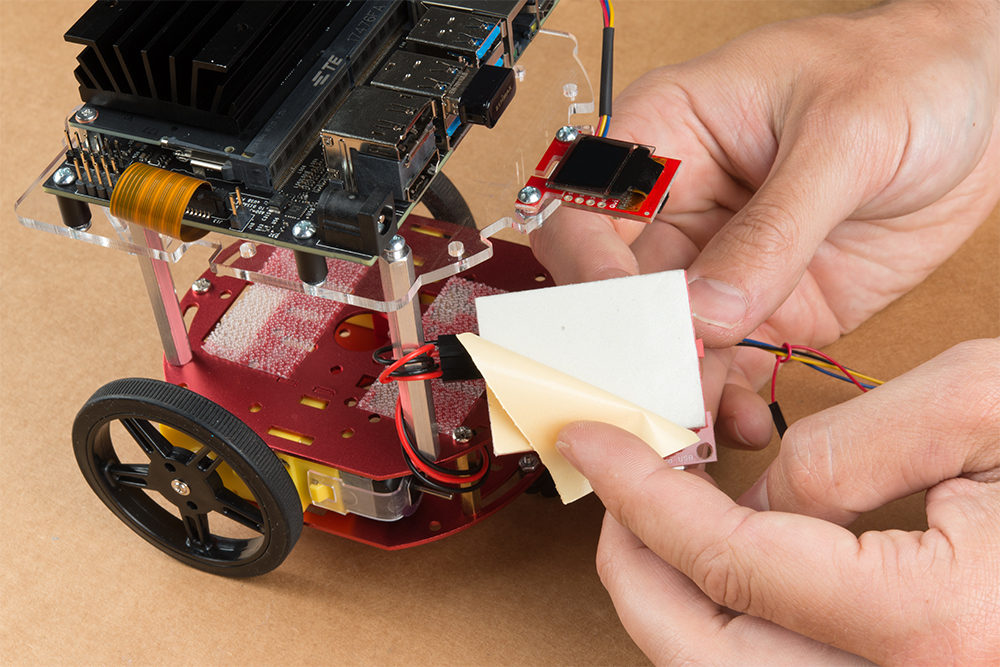
Wrap the motor wires around the rear/left standoff to take up some of the slack; one or two passes should do. Peel
the cover off the self adhesive backing on the mini breadboard you set aside at the end of section #3.
Place the breadboard near the back of the Jetbot Acrylic mounting plate where there is good adhesion & access to
all the components. Attach the (4-pin) Female Jumper Qwiic cable to the SparkFun Serial Controlled Motor Driver
pins as shown. Yellow to "SCL," Blue to "SDA," Black to "GND."

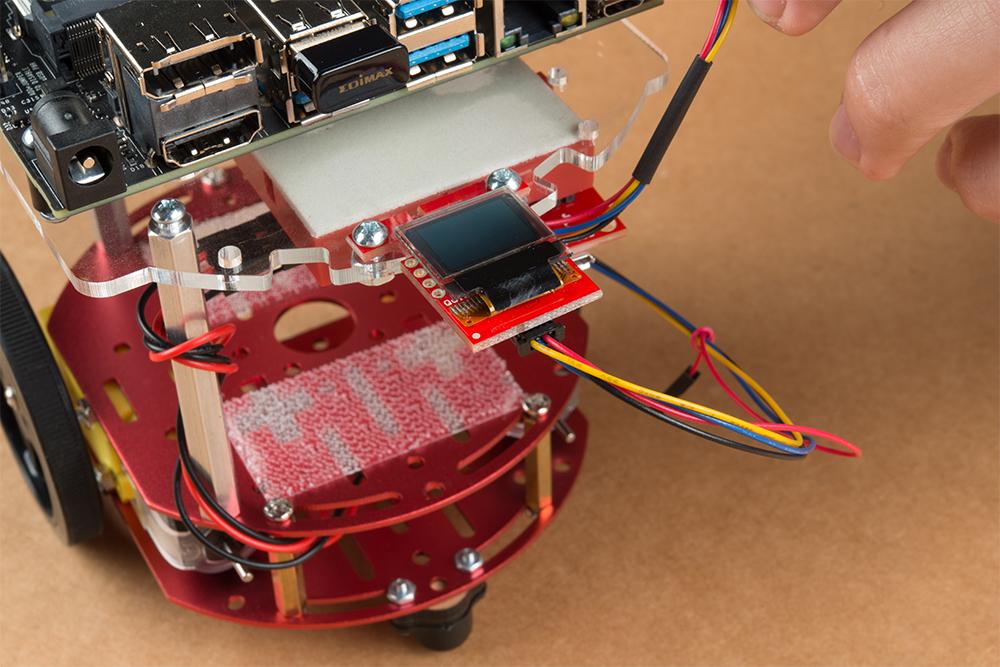
Daisy chain the polarized Qwiic connector on the other end of the (4-pin) Female Jumper Qwiic cable into the back
of the SparkFun Micro OLED (Qwiic).
Using the 100mm Qwiic Cable attach the SparkFun Micro OLED front Qwiic connector to the SparkFun pHat as
shown.
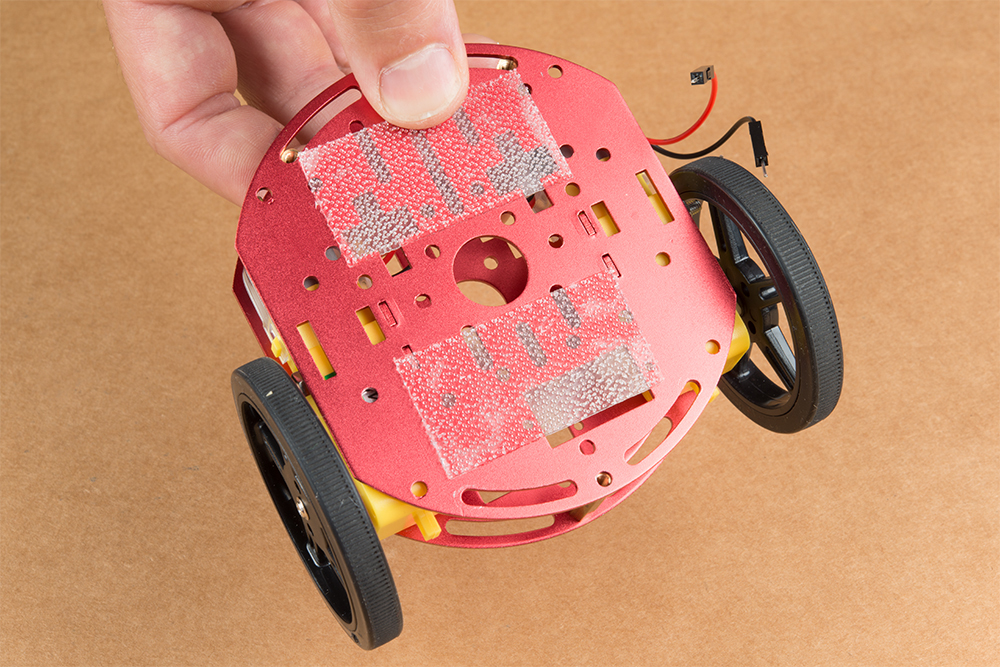
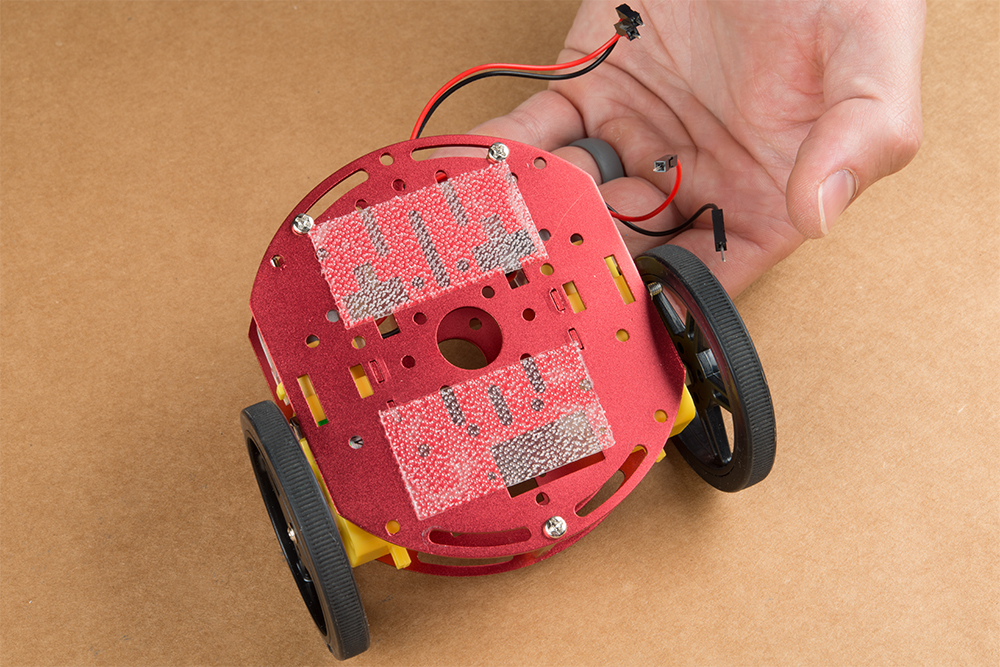
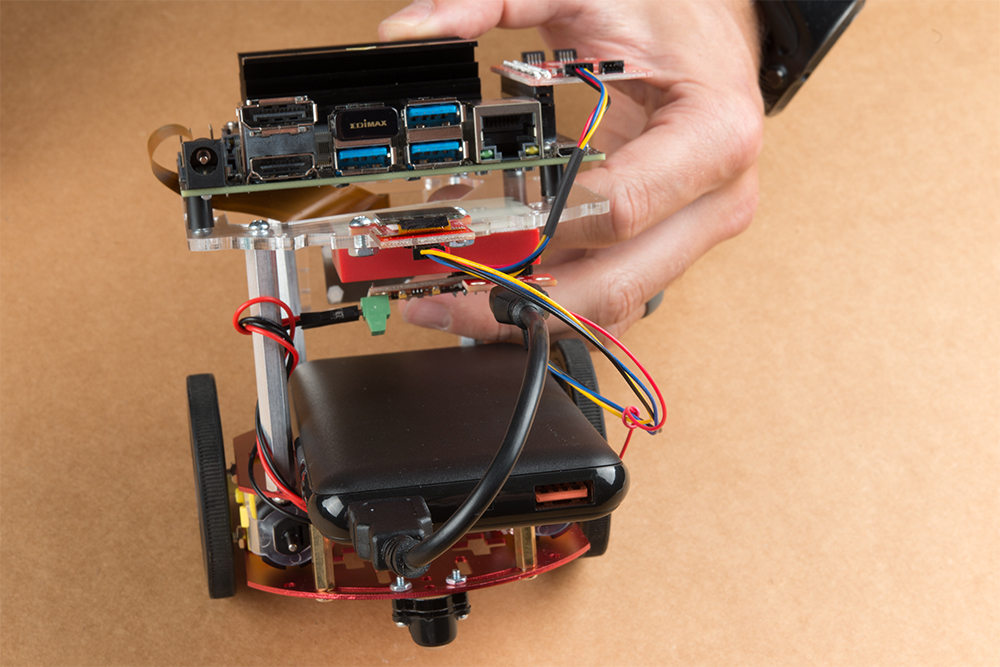
Cut the Dual Lock Velcro into two pieces and align them on the 10Ah battery & top plate of the Two-Layer Circular
Robotics Chassis as shown below. Ensure that the USB ports on the battery pack are pointing out the back of the
Jetbot. Additionally, the orange port (3A) will need to power the Jetson Nano Dev Kit & therefore will need to be on
the right side of the Jetbot.

Apply firm pressure to the battery pack to attach to the Jetbot chassis via the Dual Lock Velcro.
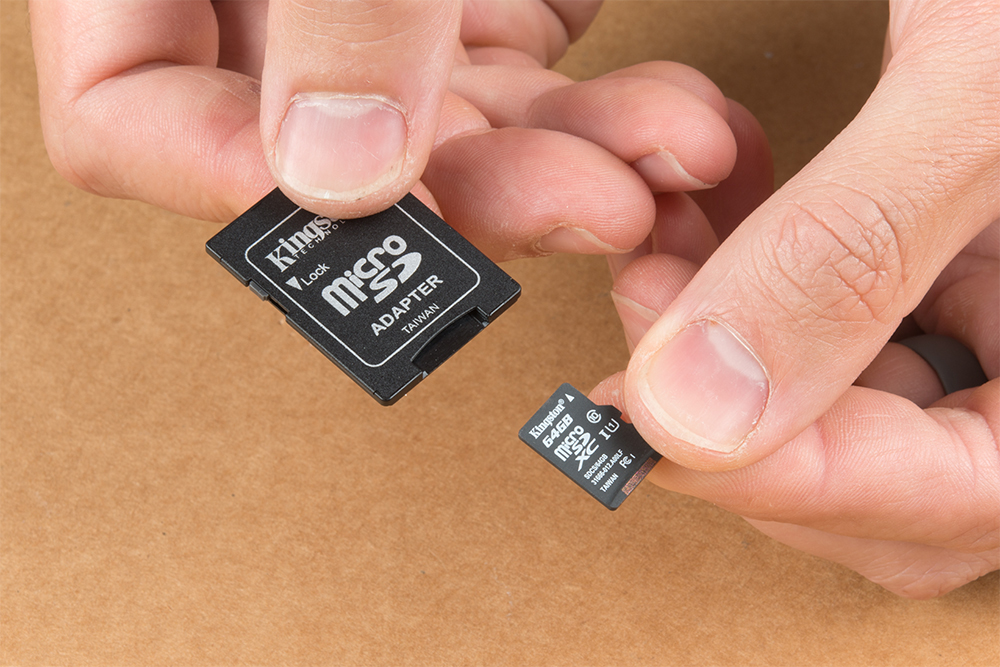
Remove the micro SD card from the SD card adapter.
Insert the micro SD card facing down into the micro SD card slot on the front of the Jetson Nano Dev Kit. Please
see the next three pictures for additional details.


Note: Once you plug the Jetson Nano Dev Kit into the 3A power port, this will "Boot Jetson Nano" which is
not covered in detail until the links in section #5 of this assembly guide. Do not proceed unless you are
ready to move forward with the software setup & examples provided by NVIDIA.
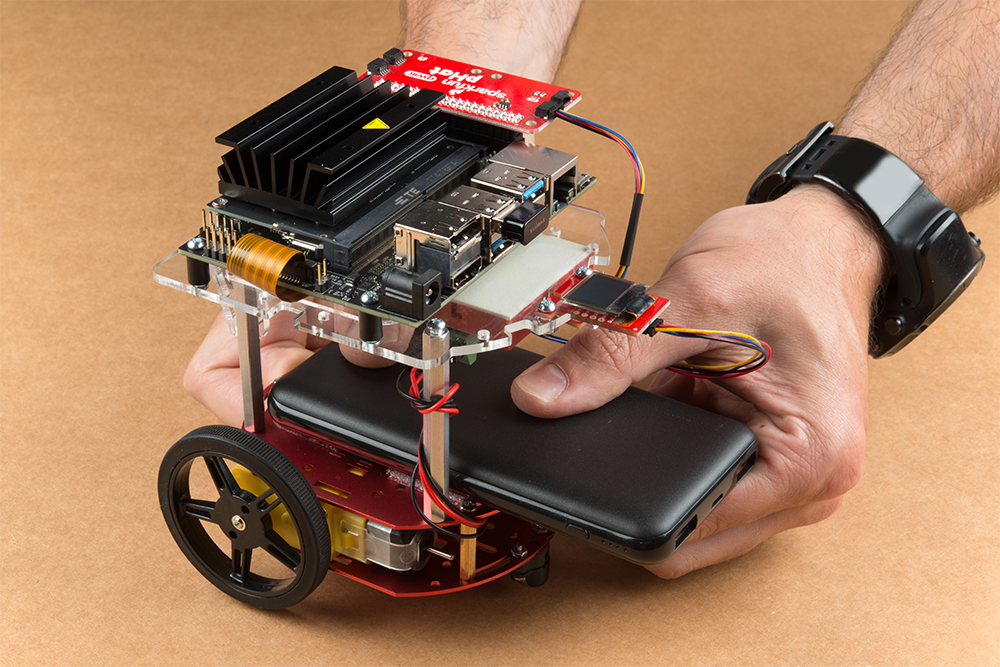
The orange port (3A) is used to power the Jetson Nano Dev Kit. Utilize the remaining 6 in micro-B USB cable to
supply power to the Jetson Nano Dev Kit.
Congratulations! You have fully assembled your SparkFun JetBot AI Kit!
5. Software Setup Guide from NVIDIA
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules
installed (including the sample machine learning models needed for the collision avoidance and object
following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the
Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please
DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto
the card (instructions below).
Your SparkFun Jetbot comes with a Pre-Flashed micro SD card. Users only need to plug in the SD card and set
up the WiFi connection to get started.
The default password on everything (i.e. login/user, jupyter notebook, and superuser) is "jetbot".
We recommend that users change their passwords after initial setup. These are typically covered on the first
boot of your Jetson Nano as detailed in the NVIDIA Getting Started with Jetson Nano walkthrough
Software Setup
Table of contents
Other sparkfun Robotics manuals




Popular Robotics manuals by other brands







RoboBuilder
RoboBuilder RQ-110 quick start guide

neobotix
neobotix MPO-500 manual

ADEEPT
ADEEPT Hexapod 6 Legs Spider Robot manual

Makeblock
Makeblock mScara-Laser Version user guide

ROKAE
ROKAE xMate SR3 Hardware installation manual

Innovation First
Innovation First HEXBUG BATTLE GROUND BUNKER 409-5121 instructions






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}