1INTRODUCTION
This guide will explain the software and hardware setup of the floor type detection and cliff detection for robotic vacuum applications
using two CH101 or ICU-10201 sensors. Floor type detection is the differentiation between hard floors (hardwood, tile, etc) and soft
floors (carpets). Cliff detection is the detection of a cliff, such as an overhanging ledge, stairs, or other similar risk to a Robotic Vacuum
Cleaner (RVC).
For clarity and simplicity, unless otherwise specified, any information referring to the CH101 in this document will also apply to the
ICU-10201.
1.1 SCOPE
This document will help users set up and run the Cliff and Floor Type Detection Demo and be able to see the correct output and
behavior from the CH101 sensors. This document solely covers the application of using two CH101 sensors to detect both cliff and
floor types. For applications where only floor type detection is needed, refer to AN-000240.
For the cliff and floor type detection algorithms to work properly, the sensors require a specific Acoustic Interface design. The Acoustic
Interface tunes the sensor’s behavior for optimal performance for this application. Users should first implement the reference Acoustic
Interface design highlighted in this document as it is optimized for the default settings in the software algorithms. Custom acoustic
designs will require experimentation from the user and are outside the scope of this document.
1.2 THEORY OF OPERATION
The CH101 is an ultrasonic Time-of-Flight (ToF) transceiver that measures the distance of an object based on how long it takes for
ultrasound transmitted from the sensor to be reflected back and received by the sensor. There is a certain amount of time after
transmission for the sensor to stop vibrating (ringdown) from the transmit pulse before it can accurately receive the reflected ToF
signal. To get around the ringdown issue while operating only a few centimeters from the floor, a second sensor is used as a dedicated
receiver and the two sensors operate in Pitch-Catch mode. In this mode, the receiving sensor does not have to deal with the ringdown
issue and it’s time constraints.
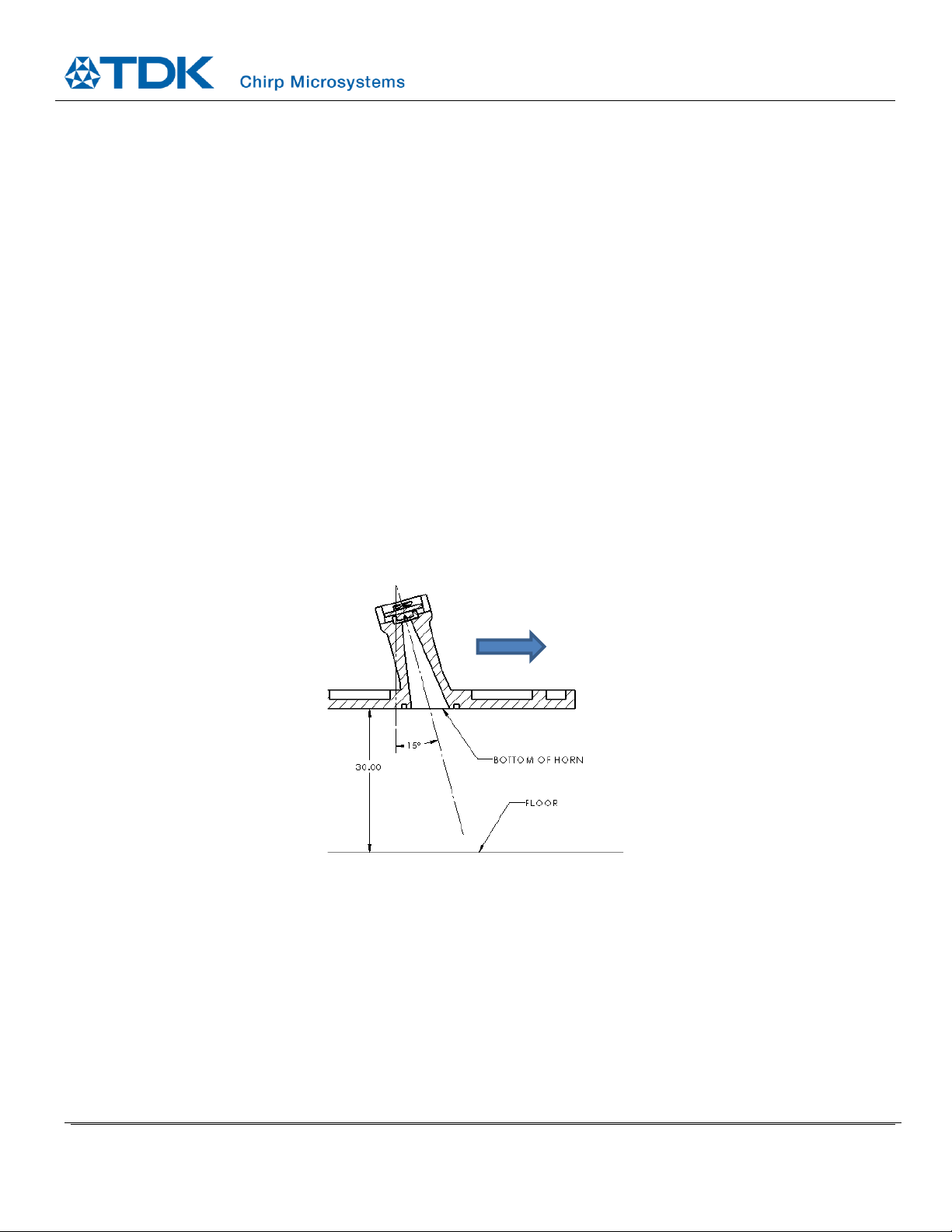
Figure 1. Diagram showing operating principle of the two-sensors in Pitch-Catch for this cliff and floor type detection application.
Different surfaces (floor types) will produce different amplitude reflections, with soft floors reflecting less and producing a lower
amplitude echo, while hard surfaces will produce a higher amplitude echo. The ToF of this echo also indicates how far away the sensor
is from the floor. When the ultrasound echo’s ToF is longer than a specified time duration, it means that there is a large gap between
the sensor and the floor, thus indicating there is a cliff in front of the sensor.