Temposonics E Series User manual
E-Series IO-Link
Operation Manual
Magnetostrictive Linear Position Sensors

Temposonics® E-Series IO-Link
Operation Manual
Table of contents
1. Introduction..................................................................................................................................................... 3
1.1 Purpose and use of this manual ................................................................................................................................................................ 3
1.2 Used symbols and warnings ..................................................................................................................................................................... 3
2. Safety instructions............................................................................................................................................. 3
2.1 Intended use.............................................................................................................................................................................................. 3
2.2 Forseeable misuse..................................................................................................................................................................................... 3
2.3 Installation, commissioning and operation................................................................................................................................................ 4
2.4 Safety instructions for use in explosion-hazardous areas.......................................................................................................................... 4
2.5 Warranty.................................................................................................................................................................................................... 4
2.6 Return ....................................................................................................................................................................................................... 4
3. Identification.................................................................................................................................................... 5
3.1 Order code of Temposonics®EH ............................................................................................................................................................... 5
3.2 Order code of Temposonics® EP................................................................................................................................................................ 6
3.3 Order code of Temposonics® EL ................................................................................................................................................................ 7
3.4 Order code of Temposonics® EP2.............................................................................................................................................................. 8
3.5 Order code of Temposonics® ER................................................................................................................................................................ 9
3.6 Nameplate ............................................................................................................................................................................................... 10
3.7 Approvals ................................................................................................................................................................................................ 10
3.8 Scope of delivery..................................................................................................................................................................................... 10
4. Product description and commissioning ..................................................................................................................11
4.1 Functionality and system design ............................................................................................................................................................. 11
4.2 Styles and installation of Temposonics® EH............................................................................................................................................. 12
4.3 Styles and installation of Temposonics® EP............................................................................................................................................. 14
4.4 Styles and installation of Temposonics® EL ............................................................................................................................................. 15
4.5 Styles and installation of Temposonics® EP2........................................................................................................................................... 16
4.6 Styles and installation of Temposonics® ER............................................................................................................................................. 17
4.7 Magnet installation .................................................................................................................................................................................. 18
4.8 Electrical connections.............................................................................................................................................................................. 20
4.9 Frequently ordered accessories............................................................................................................................................................... 21
5. Operation.......................................................................................................................................................23
5.1 Identification parameter........................................................................................................................................................................... 23
5.2 Standard commands ............................................................................................................................................................................... 24
5.3 Measuring parameter .............................................................................................................................................................................. 24
5.4 Offset....................................................................................................................................................................................................... 24
5.5 Switch points........................................................................................................................................................................................... 25
5.6 Set measurement range .......................................................................................................................................................................... 26
5.7 Error / warning messages ....................................................................................................................................................................... 27
5.8 Data storage mechanism......................................................................................................................................................................... 27
5.9 Device Access Lock................................................................................................................................................................................. 28
6. Integration into Automation Studio ........................................................................................................................29
6.1 Introduction of "Automation Studio" ........................................................................................................................................................ 29
6.2 Import IODD files .................................................................................................................................................................................... 29
6.3 Configure process data............................................................................................................................................................................ 30
7. Maintenance and troubleshooting .........................................................................................................................33
7.1 Error conditions, troubleshooting............................................................................................................................................................ 33
7.2 Maintenance............................................................................................................................................................................................ 33
7.3 Repair...................................................................................................................................................................................................... 33
7.4 List of spare parts ................................................................................................................................................................................... 33
7.5 Transport and storage ............................................................................................................................................................................. 33
8. Removal from service / dismantling.......................................................................................................................33
9. Technical data.................................................................................................................................................34
9.1 Technical data of Temposonics® EH......................................................................................................................................................... 34
9.2 Technical data of Temposonics® EP ......................................................................................................................................................... 35
9.3 Technical data of Temposonics® EL ......................................................................................................................................................... 36
9.4 Technical data of Temposonics® EP2 ....................................................................................................................................................... 37
9.5 Technical data of Temposonics® ER......................................................................................................................................................... 38
10. Appendix......................................................................................................................................................39

Temposonics® E-Series IO-Link
Operation Manual
I 3 I
1.2 Used symbols and warnings
Warnings are intended for your personal safety and for avoidance
of damage to the described product or connected devices. In this
documentation safety information and warnings to avoid danger
that might affect the life and health of operating or service personnel
or cause material damage are highlighted by the preceding pictogram
which is defined below.
1. Introduction
1.1 Purpose and use of this manual
Before starting the operation of Temposonics®position sensors,
read this documentation thoroughly and follow the safety
information. Keep the manual for future reference!
Symbol Meaning
NOTICE This symbol is used to point to situations
that may lead to material damage, but not
to personal injury.
1/ The term qualified technical personnel characterizes persons who:
• are familiar with the safety concepts of automation technology applicable
to the particular project,
• are competent in the field of electromagnetic compatibility (EMC),
• have received adequate training for commissioning and service operations
• are familiar with the operation of the device and know the information required
for correct operation provided in the product documentation.
2. Safety instructions
2.1 Intended use
This product may be used only for the applications defined under item
1 and only in conjunction with the third-party devices and components
recommended or approved by 5FNQPTPOJDT. As a prerequisite of
proper and safe operation the product requires correct transport,
storage, mounting and commissioning and must be operated with
utmost care.
1. The sensor systems of all Temposonics®series are intended
exclusively for measurement tasks encountered in industrial,
commercial and laboratory applications. The sensors are
considered as system accessories and must be connected
to suitable evaluation electronics, e.g. a PLC, IPC, indicator
or other electronic control unit.
Foreseeable misuse Consequence
Wrong sensor connection The sensor will not work
properly or can be damaged
Operate the sensor out of the
operating temperature range
No signal output
The sensor can be damaged
Power supply is out of the
defined range
Signal output is wrong /
no signal output /
the sensor can be damaged
Position measurement is
influenced by an external
magnetic field
Signal output is wrong
Cables are damaged
Short circuit – the sensor can
be destroyed / sensor does not
respond
Spacers are missing /
are installed in the wrong order Error in position measurement
Wrong connection
of ground / shield
Signal output is disturbed
The electronics can be damaged
Use of a magnet that is not
certified by 5FNQPTPOJDT Error in position measurement
Do not reprocess the sensor afterwards.
ÎThe sensor might be damaged.
Do not step on the sensor.
ÎThe sensor might be damaged.
2.2 Forseeable misuse
The content of this technical documentation and of its appendix
is intended to provide information on mounting, installation and
commissioning by qualified automation personnel 1or instructed
service technicians who are familiar with the project planning and
dealing with Temposonics®sensors.

Temposonics® E-Series IO-Link
Operation Manual
I 4 I
2.3 Installation, commissioning and operation
The position sensors must be used only in technically safe condition.
To maintain this condition and to ensure safe operation, installation,
connection and service, work may be performed only by qualified
technical personnel.
If danger of injury to persons or of damage to operating equipment
is caused by sensor failure or malfunction, additional safety measures
such as plausibility checks, limit switches, EMERGENCY STOP
systems, protective devices etc. are required. In the event of trouble,
shut down the sensor and protect it against accidental operation.
Safety instructions for commissioning
To maintain the sensor's operability, it is mandatory to follow
the instructions given below.
1. Protect the sensor against mechanical damage during
installation and operation.
2. Do not open or dismantle the sensor.
3. Connect the sensor very carefully and pay attention to the
polarity of connections and power supply.
4. Use only approved power supplies.
5. It is indispensable to ensure that the specified permissible
limit values of the sensor for operating voltage,
environmental conditions, etc. are met.
6. Check the function of the sensor regularly and provide
documentation of the checks.
7. Before applying power, ensure that nobody’s safety
is jeopardized by starting machines.
2.4 Safety instructions for use in explosion-hazardous areas
The sensor is not suitable for operation in explosion-hazardous areas.
2/ See also applicable 5FNQPTPOJDT terms of sales and delivery on
www.UFNQPTPOJDT.com
2.5 Warranty
5FNQPTPOJDT grants a warranty period for the Temposonics®position
sensors and supplied accessories relating to material defects and
faults that occur despite correct use in accordance with the intended
application 2. The 5FNQPTPOJDT obligation is limited to repair or
replacement of any defective part of the unit. No warranty can be
provided for defects that are due to improper use or above average
stress of the product, as well as for wear parts. Under no
circumstances will 5FNQPTPOJDT accept liability in the event of offense
against the warranty rules, no matter if these have been assured or
expected, even in case of fault or negligence of the company.
5FNQPTPOJDT explicitly excludes any further warranties. Neither
the company’s representatives, agents, dealers nor employees are
authorized to increase or change the scope of warranty.
2.6 Return
For diagnostic purposes, the sensor can be returned to 5FNQPTPOJDT
or a repair facility explicitly authorized by 5FNQPTPOJDT. Any shipment
cost is the responsibility of the sender 2.
For a corresponding form, see chapter "10. Appendix" on page 39.
Temposonics® E-Series IO-Link
Operation Manual
I 5 I
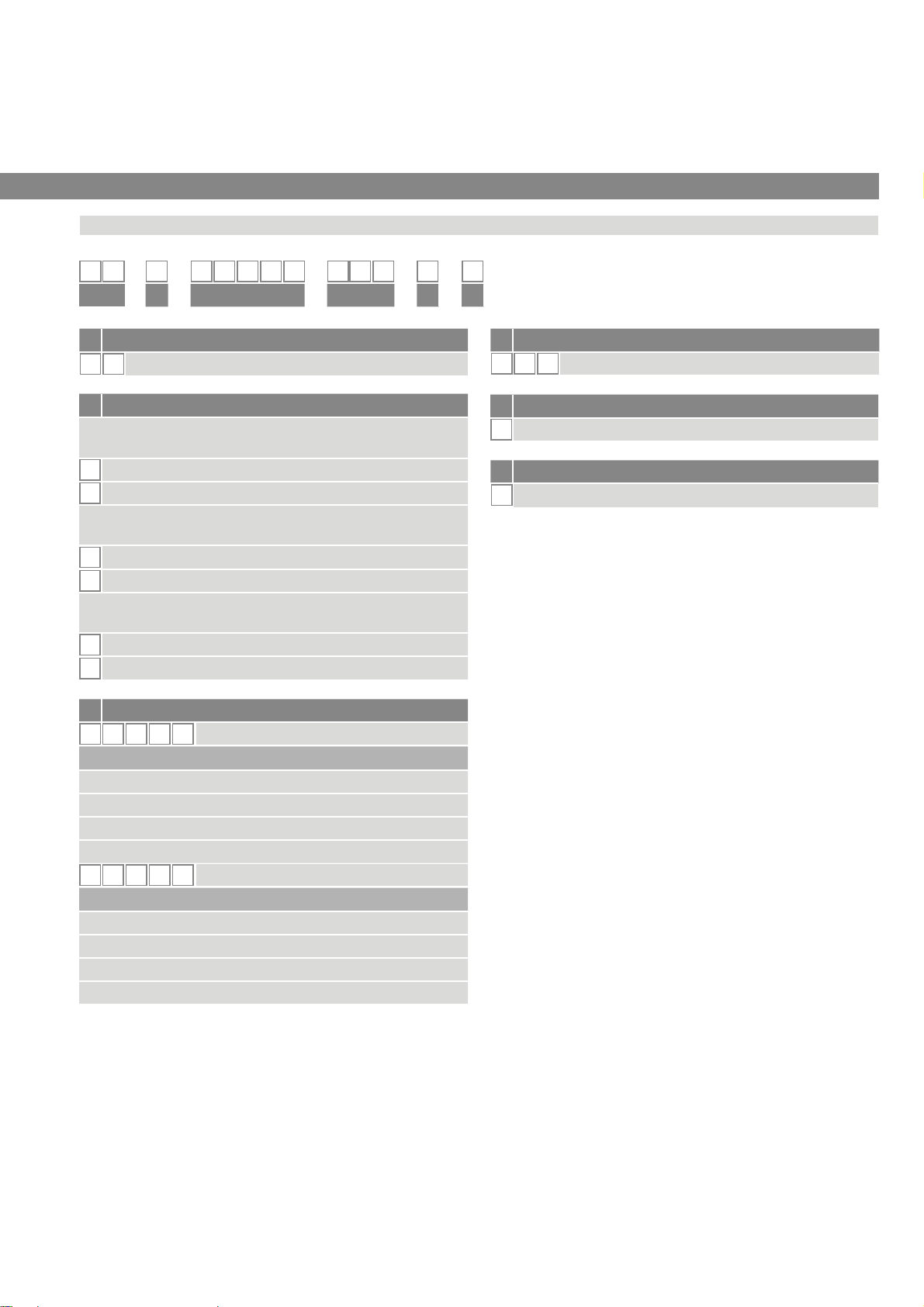
3.1 Order code of Temposonics®EH
*/ Non standard stroke lengths are available; must be encoded in 5 mm / 0.1 in. increments
3. Identification
1 2 3 4 5 6 7 8 9 10 11 12 13
E H D 4 4 1K
ab c d ef
b Design
EH rod-style sensor with housing material 1.4305 (AISI 303)
and rod material 1.4301 (AISI 304)
KFlange M18×1.5-6g, 7 mm rod Ø
LFlange ¾"-16 UNF-3A, 7 mm rod Ø
EH rod-style sensor with housing material 1.4305 (AISI 303)
and rod material 1.4306 (AISI 304L)
MFlange M18×1.5-6g, 10 mm rod Ø
SFlange ¾"-16 UNF-3A, 10 mm rod Ø
EH rod-style sensor with housing material 1.4404 (AISI 316L)
and rod material 1.4404 (AISI 316L)
FFlange ¾"-16 UNF-3A, 10 mm rod Ø
WFlange M18×1.5-6g, 10 mm rod Ø
a Sensor model
E H Rod
d Connection type
D 4 4 M12 (4 pin) male connector
e Operating voltage
1+24 VDC (±25 %)
f Output
KIO-Link
c Stroke length
X X X X M 0050…2540 mm
X X X X U002.0…100.0 in.
.
Standard stroke length (mm*) Ordering steps
50 … 500 mm 5 mm
500 … 750 mm 10 mm
750…1000 mm 25 mm
1000…2540 mm 50 mm
Standard stroke length (in.) Ordering steps
2 … 20 in. 0.2 in.
20 … 30 in. 0.5 in.
30 … 40 in. 1.0 in.
40…100 in. 2.0 in.
Other manuals for E Series
1
Table of contents
Other Temposonics Accessories manuals




















