3/24
TABLE OF CONTENTS
1Before operation 4
1.1 Precautions ............................................................................................................ 4
1.1.1 Put the Safety First ..................................................................................................... 4
1.1.2 Operation..................................................................................................................... 5
1.1.3 Check and Repair ........................................................................................................ 5
2Drive Specification and Dimension 6
2.1 Specifications of Drive............................................................................................ 6
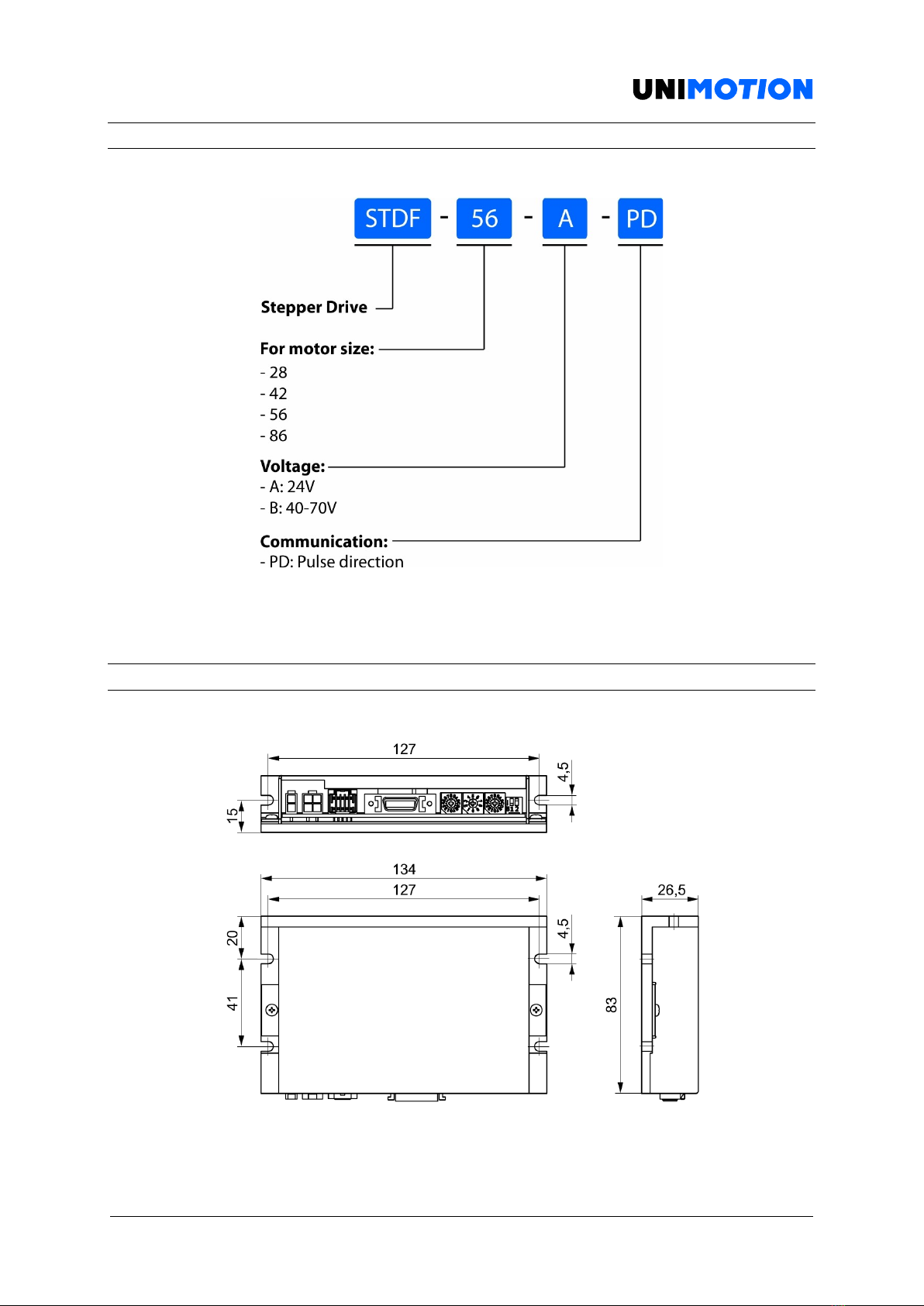
2.2 Model naming......................................................................................................... 7
2.3 Product dimensions................................................................................................ 7
3Installation 8
3.1 Precautions of installation ...................................................................................... 8
3.2 Appearance and part name ..................................................................................... 8
4Brake Operation Timing Chart 9
5Settings and Operation 10
5.1 Drive Status LED ................................................................................................... 10
5.2 Pulse Input Setting Switch (SW1.1) ....................................................................... 11
5.3 Rotational Direction Setting Switch (SW1.2) .......................................................... 12
5.4 Resolution Setting Switch (SW3)........................................................................... 12
5.5 Position Controller Gain Setting Switch (SW2)....................................................... 13
5.6 In-Position Value Setting Switch (SW4)................................................................. 14
5.7 Encoder Connector (CN2) ..................................................................................... 15
5.8 Input/Output Signal Connector (CN1) .................................................................... 15
5.9 Motor Connector (CN3)......................................................................................... 16
5.10 Power Connector (CN4)..................................................................................... 16
6System Configuration 17
6.1 External Wiring Diagram........................................................................................ 18
7Control Signal Input/Output Description 19
7.1 Input Signal .......................................................................................................... 19
7.2 CW, CCW Input ..................................................................................................... 19
7.3 Servo On/Off Input................................................................................................ 20
7.4 Alarm Reset Input ................................................................................................. 20
7.5 Output signal ........................................................................................................ 21
7.6 Alarm Output ........................................................................................................ 21
7.7 In-Position Output ................................................................................................ 22
7.8 Encoder Signal Output .......................................................................................... 22