1Product Overview ..................................................................................................3
2Installing and connecting the controller.................................................................3
2.1 Safety...............................................................................................................3
2.2 Overview.........................................................................................................4
2.2.1 Connecting the FFC ribbon cables...........................................................4
2.2.2 Basic installation overview –LP12 .........................................................5
2.2.3 Configuration menu and tuning software ................................................6
2.2.4 Configuration menus and parameters - introduction ...............................7
2.2.5 Setup Menu - item entry ..........................................................................7
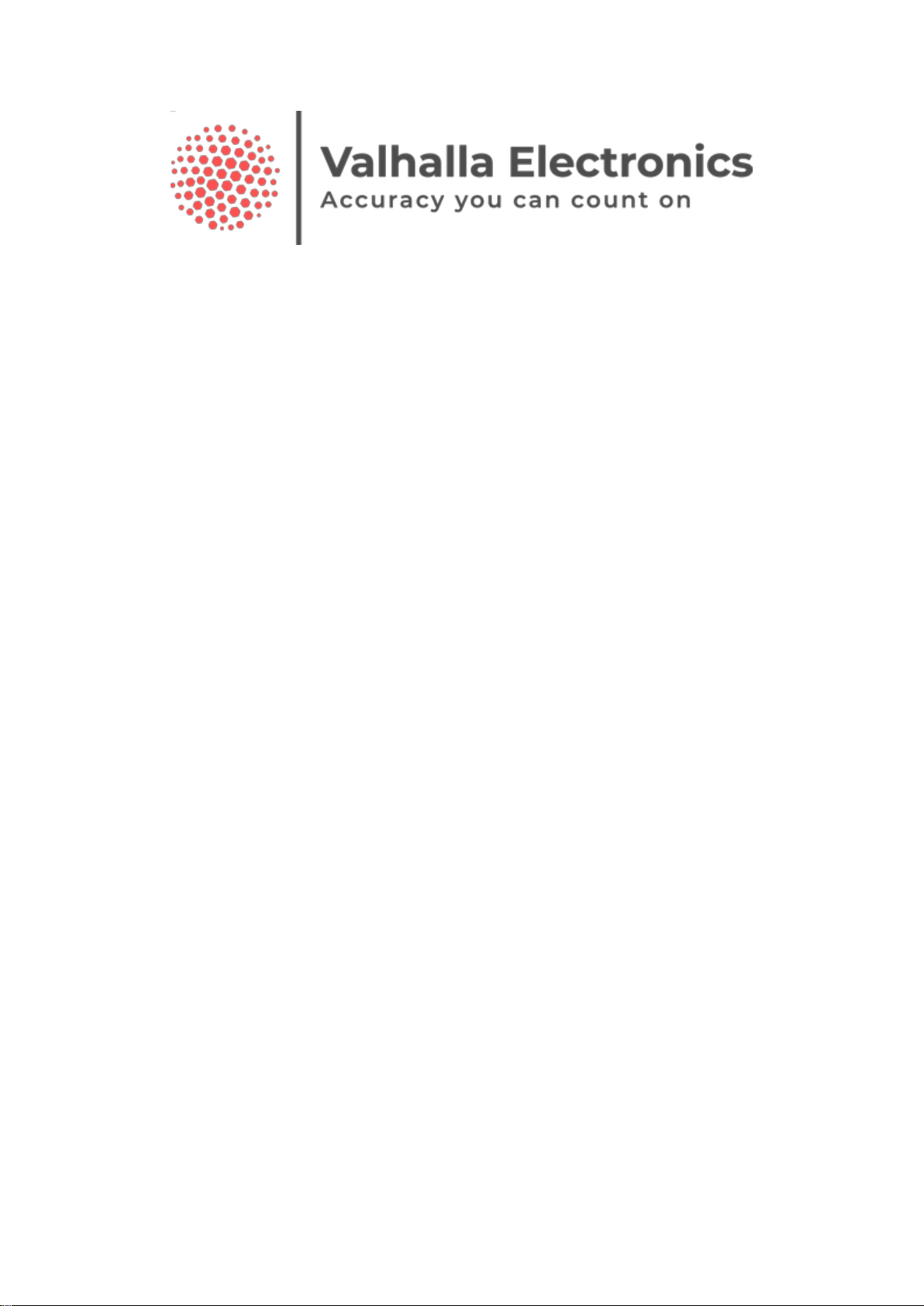
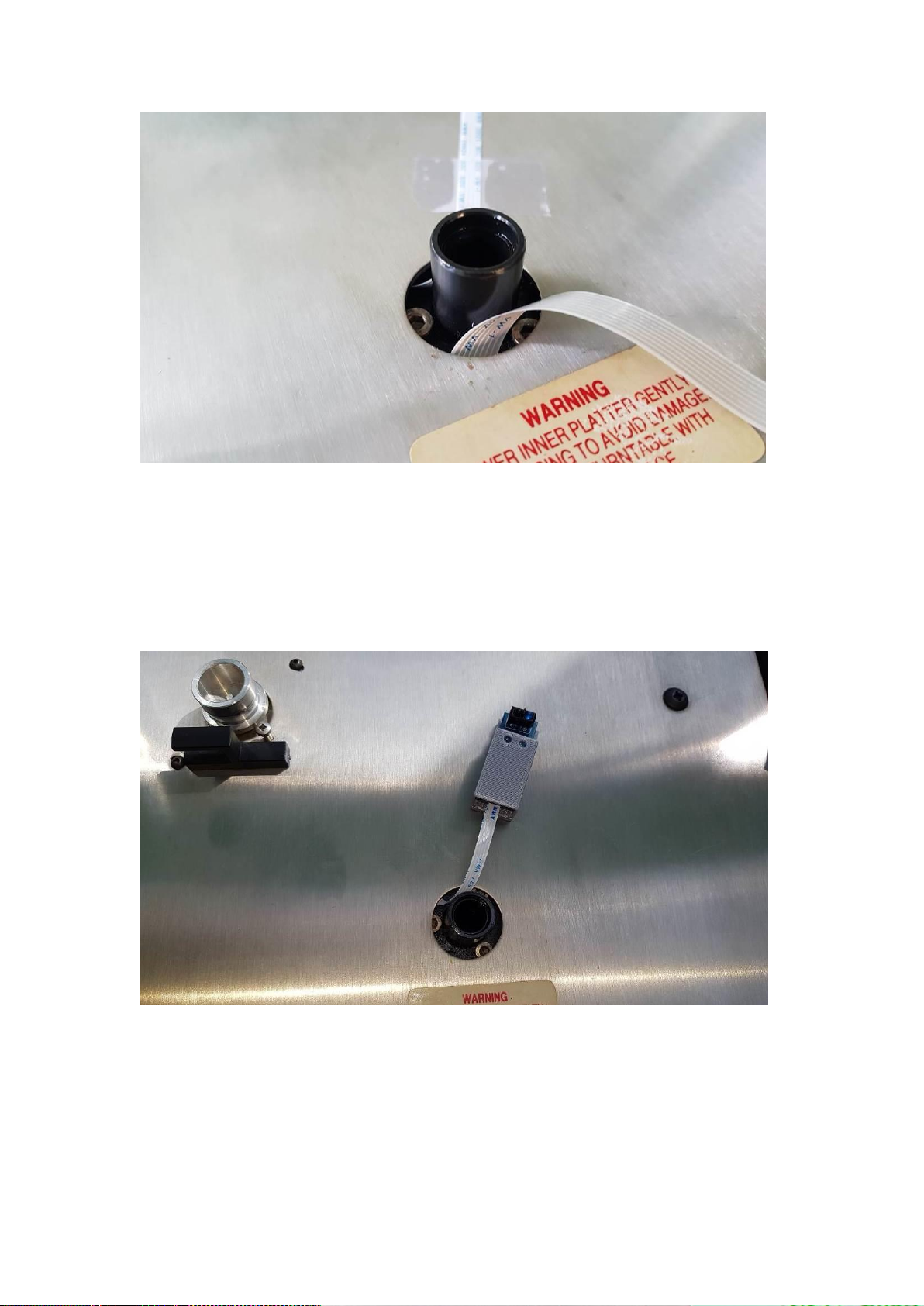
2.3 Mounting the platter internal IR sensor –LP12..............................................7
2.4 Mounting OLED Display –LP12 .................................................................10
2.5 Adaptive Speed Control –PID......................................................................12
2.5.1 Turntable PID values .............................................................................12
2.5.2 Final installation note.............................................................................13
3Configuration menus and parameters ..................................................................14
3.1.1 Setup Menu - item entry ........................................................................14
3.1.2 System Parameters.................................................................................14
3.1.3 Motor Parameters...................................................................................16
3.1.4 PID Control parameters .........................................................................16
3.1.5 Test platter Sensor Trigger.....................................................................17
3.1.6 RequestedvsProgrammed Values...........................................................17
3.1.7 Write to eeprom .....................................................................................17
3.1.8 Motor ON/OFF ......................................................................................17
3.2 PID Tuning - Theory.....................................................................................18
3.3 Step response.................................................................................................19
3.4 Stability in the time domain..........................................................................19
3.4.1 Analysing step response plots................................................................20
3.5 Tutorial –Manually tuning from scratch ......................................................22
4Appendix - MAC Users.......................................................................................26
5Specifications.......................................................................................................28
6Manufacturer Details ...........................................................................................28