CANFDNET-400U
High-Performance Four-Channel CANFD Bus-to-Ethernet Converter User Manual
©2021 Guangzhou ZLG Electronics Technology Co.,Ltd.
1
Contents
1. Functions .....................................................................................................1
1.1 Overview.................................................................................................................1
1.2 Features..................................................................................................................2
1.2.1 Powerful hardware.......................................................................................2
1.2.2 Perfect functions ..........................................................................................2
1.3 Specifications .........................................................................................................3
1.3.1 LAN...............................................................................................................3
1.3.2 CAN..............................................................................................................3
1.3.3 Software Features........................................................................................3
1.3.4 EMC Characteristics ....................................................................................3
1.3.5 Electrical Parameters...................................................................................3
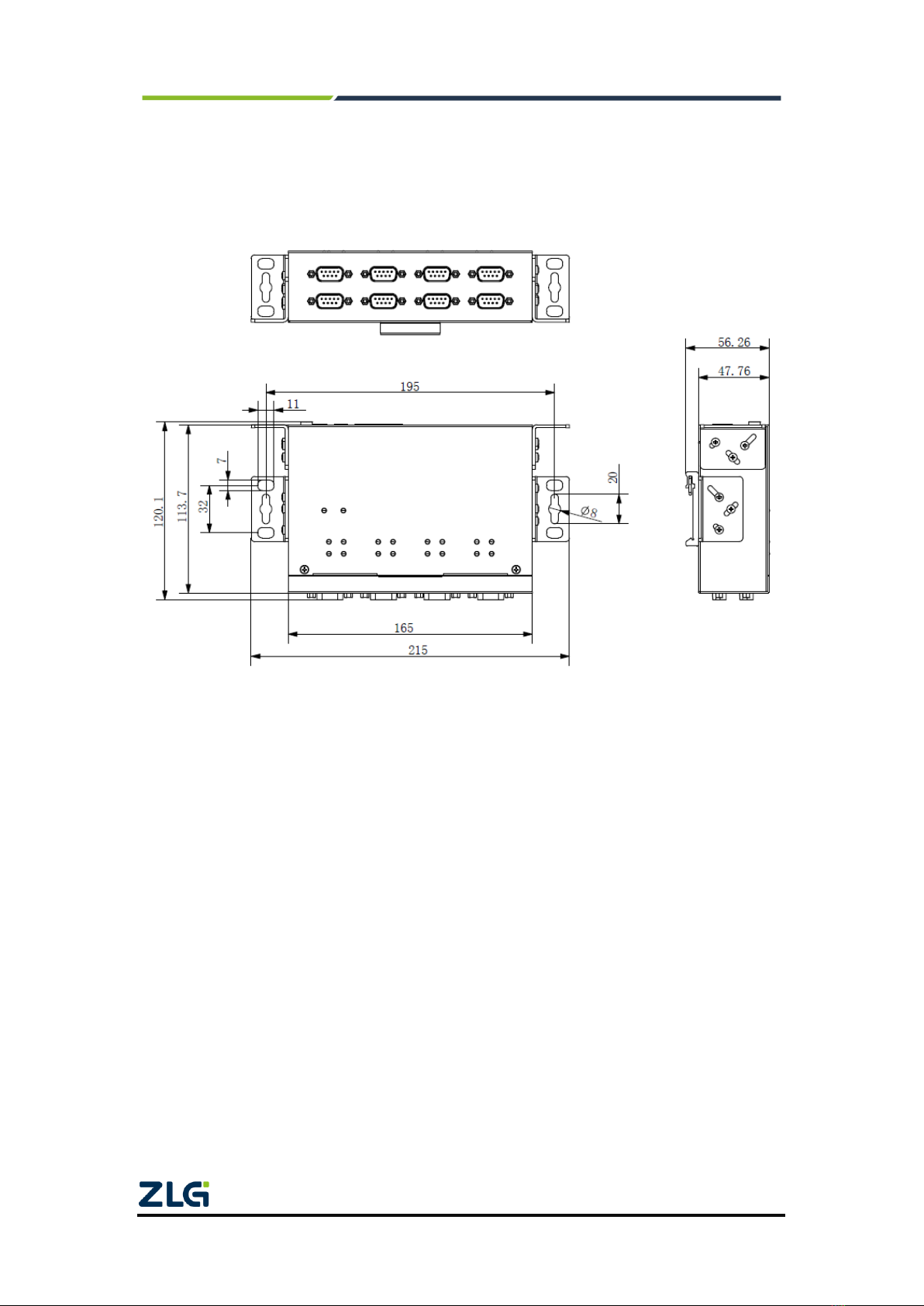
1.4 Mechanical Dimensions .........................................................................................5
2. Hardware Interfaces.....................................................................................6
2.1 Appearance ............................................................................................................6
2.2 Power Interfaces.....................................................................................................7
2.3 Ethernet Interface...................................................................................................7
2.4 Device Restart and Default Restoration.................................................................7
2.5 Terminal Resistance DIP Switch ............................................................................8
2.6 CAN Communication Interface...............................................................................9
2.7 Signal Indicators...................................................................................................10
3. Hardware Connection................................................................................11
4. Working Modes..........................................................................................12
4.1 TCP Server Mode.................................................................................................12
4.2 TCP Client Mode ..................................................................................................13
4.3 UDP Mode............................................................................................................14
5. Quick Instructions ......................................................................................15
5.1 Default Settings of the Device IPAddress ...........................................................15
5.2 Obtaining the Device IPAddress..........................................................................15
5.3 PC and Device Network Segment Detection.......................................................17
5.3.1 Windows98/ME Network Settings..............................................................17
5.3.2 Windows 2000/XP Network Settings .........................................................19
5.4 CANET-8E-U and USBCAN Interface Card Communication...............................22
6. ZNetCom Software Configuration..............................................................27
6.1 Installing Configuration Software .........................................................................27
6.2 Obtaining Device Configurations..........................................................................28
6.3 Modifying Device Configurations..........................................................................31
6.4 Configuration Parameters ....................................................................................31
6.5 Saving Restored Settings.....................................................................................38
6.5.1 Saving Settings..........................................................................................38
6.5.2 Restoring Settings......................................................................................38
6.6 Upgrading Firmware.............................................................................................39