TM Page 5
1 ASTECH ROTARY TELEMETRY SYSTEMS - GENERAL DESCRIPTION
Astech Rotary Telemetry Systems enable the measurement of physical quantities – torque, strain,
temperature or vibration for example, on rotating or moving components, by means of non-contacting radial
data transmission. In addition to providing a wire-free method of transferring the measurement data to a
stationary pickup, the systems incorporate signal conditioning for the component mounted transducers, and
outputs in either analogue or digital serial formats.
The telemetry system is based around the RE3D Demodulator. This is a highly sophisticated unit that can output digital and
analogue data collected from a variety of transmitter types. The built in microcontrollers allow onboard computation of
strain and power directly from mechanical parameters entered into the unit from the front panel or using a PC/laptop via a
USB interface. Circuitry and hardware comprising of a demodulator, pcm decoder and analogue output conditioning circuitry
– digital zero and output level trimmers, signal status indicators etc., are contained within a compact extruded aluminium
enclosure type RE. An inductive power supply oscillator, which replaces batteries as the transmitter power source, is also
incorporated. This can be disabled allowing battery powered transmitters to be used. The power supply is highly flexible
allowing the unit to be powered by either a 9-30VDC source at 1A or a 90-260VAC mains voltage.
Output conditioning circuitry provides filtering, zero adjustment and output level adjustment. Maximum output levels are ±
10V. A tachometer input allows shaft RPM to be displayed. Valid data reception is indicated by the presence of a front
panel red ‘Error’ LED. Depending on the transmitter type various signals can be output. For example, using a TX34D or
TX35D allows the display and output of strain, power, and transmitter power supply voltage and transmitter temperature.
The new programmable transmitters, eg TX34D/TX35D, allow the RE3D to be used to set the gain, offset and calibration.
This is done by sending commands via the inductive power supply to the microcontroller on the transmitter. This allows the
gain offset and calibration to be controlled whilst the transmitter is installed.
The received data is decoded into analogue
voltage outputs, or alternatively converted to
serial data for input into a PC. Various types
of demodulator/readout hardware are
available, including benchtop, industrial and
compact versions for in-vehicle use.
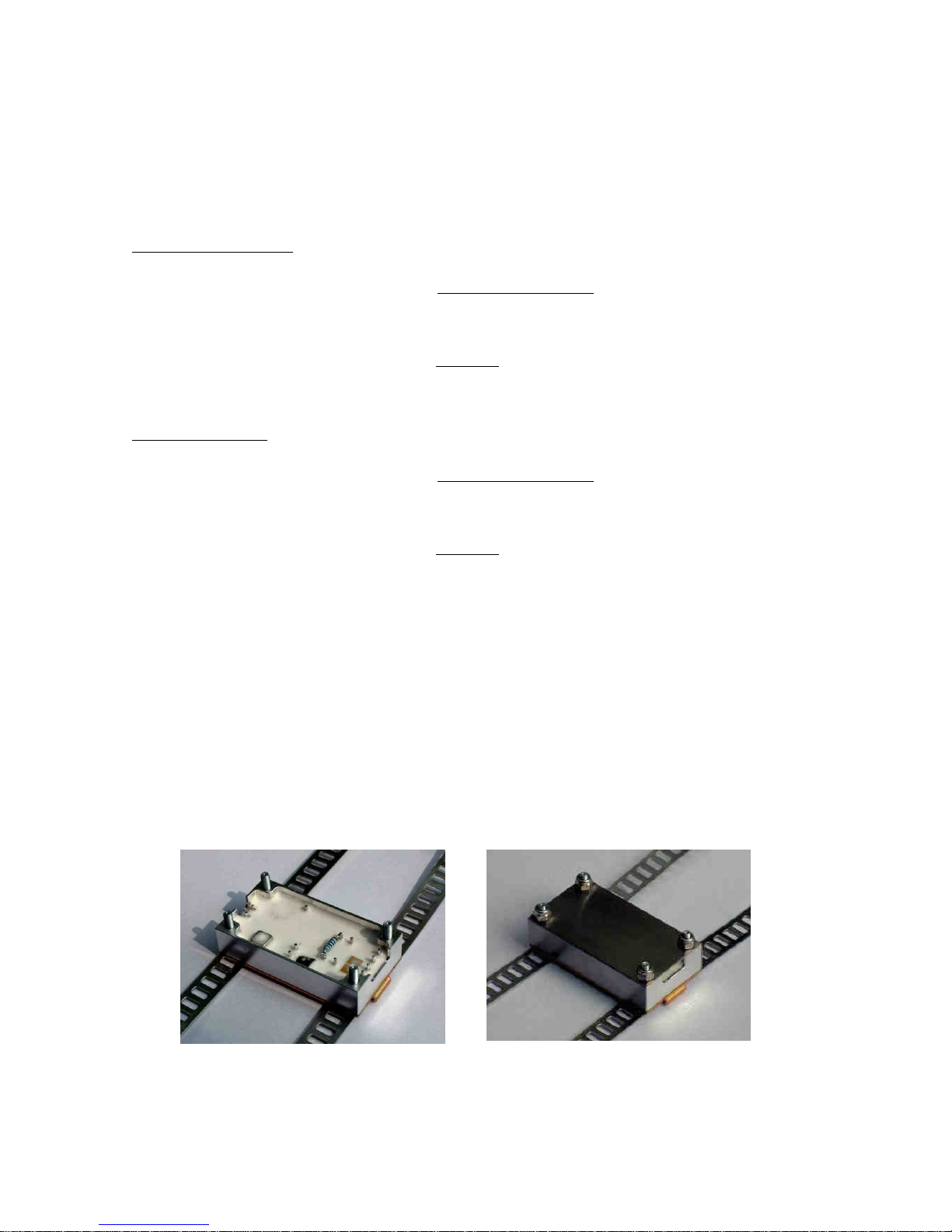
A miniature transmitter and power pickup
loop or battery pack are attached to the
rotating shaft or component. The
transmitter converts the transducer
outputs into a frequency modulated signal,
enabling transfer from the rotating shaft to
a stationary pickup. The standard
transmission method is by inductive-
coupling, but alternatives including infra-
red, radio and capacitive coupling are also
available for special applications.
A pickup, combined with an
energising head in the case of
inductively powered systems,
collects the data and re-
transmits via cable to the system
demodulator and readout
hardware.