4
Note: During play, only the trajectory can
be changed.
Fill the „ball container” with a sucient quan-
tity of balls (50-60 balls) and then turn the Ball/
min rotary switch to the „0” position before
turning on the power.
After turning on the power, the robot will carry
out a brief self test (approximately 5 seconds)
and the control unit will then automatical-
ly switch to the basic setting. By turning the
„Ball/min” rotary switch to a higher position
the projection motors will start to work and
the robot will start releasing balls.
3. OPERATION
3.1 | STARTING THE ROBOT
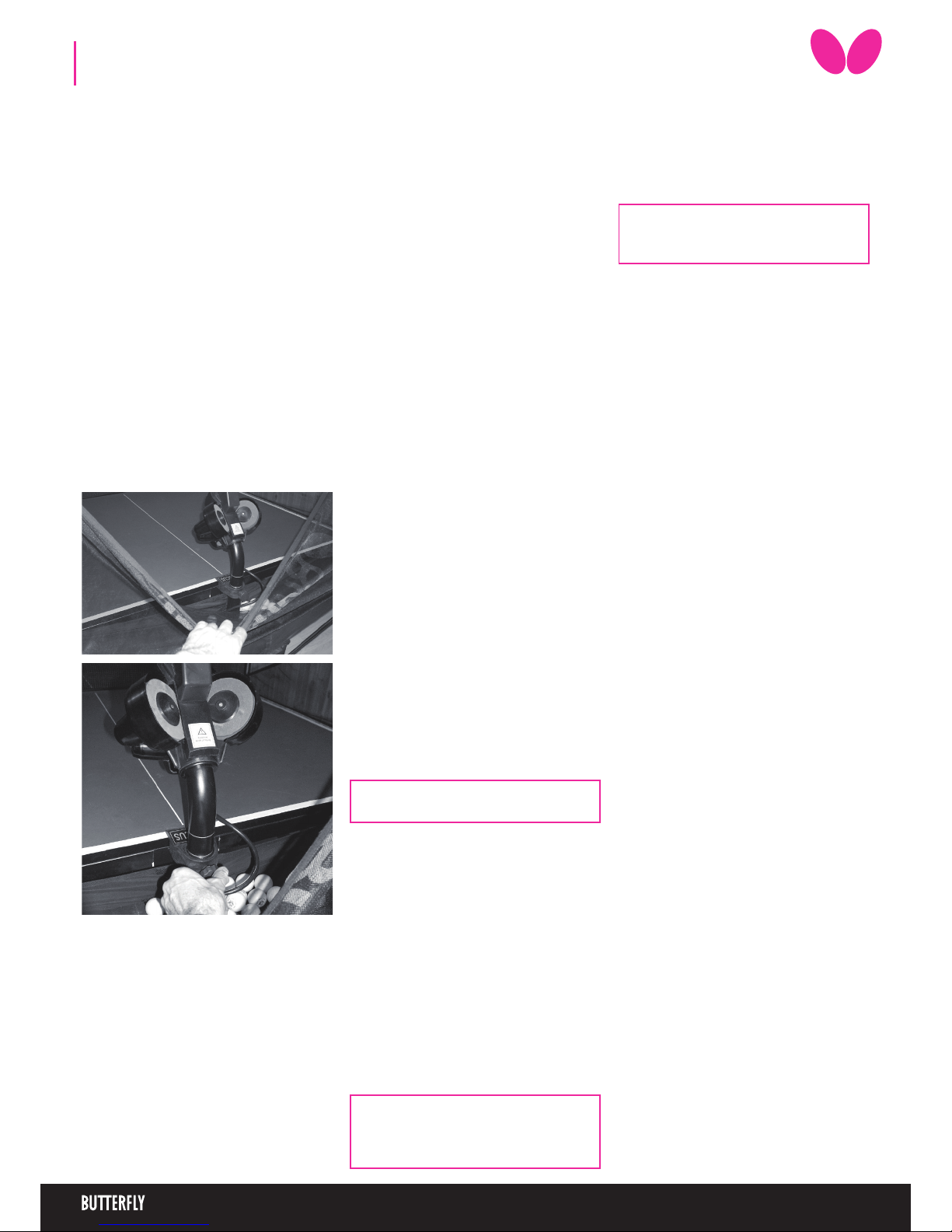
3.2 | THE HEIGHT OF THE PROJECTION
HEAD
As with all the Amicus robots, the height of the
robot head can be adjusted as follows: Loo-
sen the hand screw on the back of the tube
which holds the projection head. The tube can
be moved up and down as required. (Fig. 9.).
Finally adjust to the desired height, ensuring
that the top of the outer tube lines up with
one of the markings on the inner tube then
tighten the hand screw (Fig. 10).
3.3 | BALL PLACEMENT
Note: This function was developed based
on the fact that fast balls are generally re-
turned quickly whilst returns of slow and
shorter balls require more time.
The new “AFC” (Automatic Frequency Control)
function can be selected if there are dierent
types of balls selected within an exercise.
When the AFC function has been selected the
ADVANCE automatically adjusts the time in-
ter-vals between individual balls with varied
spin.
This function takes into consideration whether
the previous ball was delivered fast or slow
and with backspin or topspin. It can therefore
simulate a real match situation by delivering
the next ball earlier or later accordingly.
3.4 | AFC FUNCTION
1. Ball delivery to a specic point on the table
After turning on of the robot, the rst yellow
light is ashing and the control unit will auto-
matically switch-to the basic setting. The para-
meters of this ball (Trajectory, Sidespin, Speed
and Spin) can be changed with the help of the
buttons for setting the trajectory, sidespin,
speed and spin. The landing spot can be con-
tinuously set using the rotary switch for left/
right placement.
Pushing the “Sample” button the machine gi-
ves an actual ball (one that is set momently)
during the setting procedure.
2. Programmed ball delivery to various points
on the table
With Button B„g“, at least two balls (maximum
six) must be selected. Then various targets can
be chosen by means of the corresponding
left/right switches. The ashing LEDs indicate
which ball will be delivered next. By pressing
Button A „f“ the number of balls can be re-
duced. After the end of each “round” the ball
delivery will commence again from the begin-
ning.
3. “rnd”Random ball delivery to various points
around a specic point
In case the rnd is switched on with the But-
ton for random function (RND) then the ro-
bot plays the set rally (described above) but
not exactly to the set places, but to 20 cm big
sur-rounding of those, which is closer to the
real game. Do not set the ball placing to the
edge of the table when using the„rnd”, becau-
se the machine can throw the balls near the
table by reason of the ball spread!
(It is enough the assigned one ball to this fun-
ction.)
4. “RND” Random ball delivery to various
points on the table
In case switching on the Rnd (pushing ones
more the RND button) the machine doesn’t
throw anymore the set balls in their set order,
but in random way, jumping here and there
among the designated balls. Therefore it can
not be foreseen where the robot throws the
next ball. It is sure only the fact that the balls
are thrown to one of the set places.
(There need to be at least 2 assigned balls to
use this function.)
5. Combining„trnd” and „rnd”
The “trnd” and “rnd” functions can be com-
bined by pressing Button RND for a third time.
In this case the set points are chosen at ran-
dom (RND) and the balls will be de-livered ran-
domly within a 20cm diameter circle of the set
points, simulating a real match situation.
9
10
Programming sequences and exercises takes
time. In order not to lose the programmed
exercises after the robot is switched o, AMI-
CUS ADVANCE allows to save up to 22 exerci-
ses that can be played at any time.
Saving exercises in the memory
Turn the “MEMORY place” rotary switch to the
position where you want to save the exercise
on the control unit (places 11-22). Hold down
the “MEMORY Select/save“ button (approx. 2
secs) until the light starts to ash. The ashing
LED means that the exercise has been saved in
the memory.
Retrieving the saved exercise from the memory
First select the program you require by tur-
ning the “MEMORY place” button accordingly.
By quickly pressing the“MEMORY Select/save“
button, the program number will now appe-
ar on the control unit to which the switch is
currently pointing. All the lights will now start
ashing, indicating that the robot is operating
in memory mode and is now ready to play the
exercise from the memory. Turn the„Ball/min”
rotary switch to start the exercise. The only
settings which can now be adjusted are: “Ball
placement”, „Ball/min”, „AFC” and „RND”. It is
not possible to change the parameters of the
other ball settings.
3.5 | MEMORY
Changing programs in the Memory
It is possible to change the ball sequences
in the programs which have previously been
saved by using the „Backstep” button. This
should be activated for the specic ball which
you would like to adjust within the program
which has just been retrieved from the memo-
ry.. After changing a ball´s settings, the pro-
gram can now be saved again in the memory
by pressing the„MEMORY select/save”button.
Ball characteristics
The set Spin, Speed, Side-Spin and trajectory
apply for each programmed ball in the same
way.
Ball-frequency
By turning the „rotary switch for ball-frequen-
cy“ you can adjust the quantity of ejected balls
per minute.
The AMICUS throws more balls out if the fre-
quency is set higher.
Switch o
Disconnect the power supply when the robot
is not used for a longer period of time;
the AMICUS should never be left alone swit-
ched on.
Note: Memory Banks 1-10 contain pre-
saved exercises that should not be over-
written.