9
cause the follower drive to increase in speed.
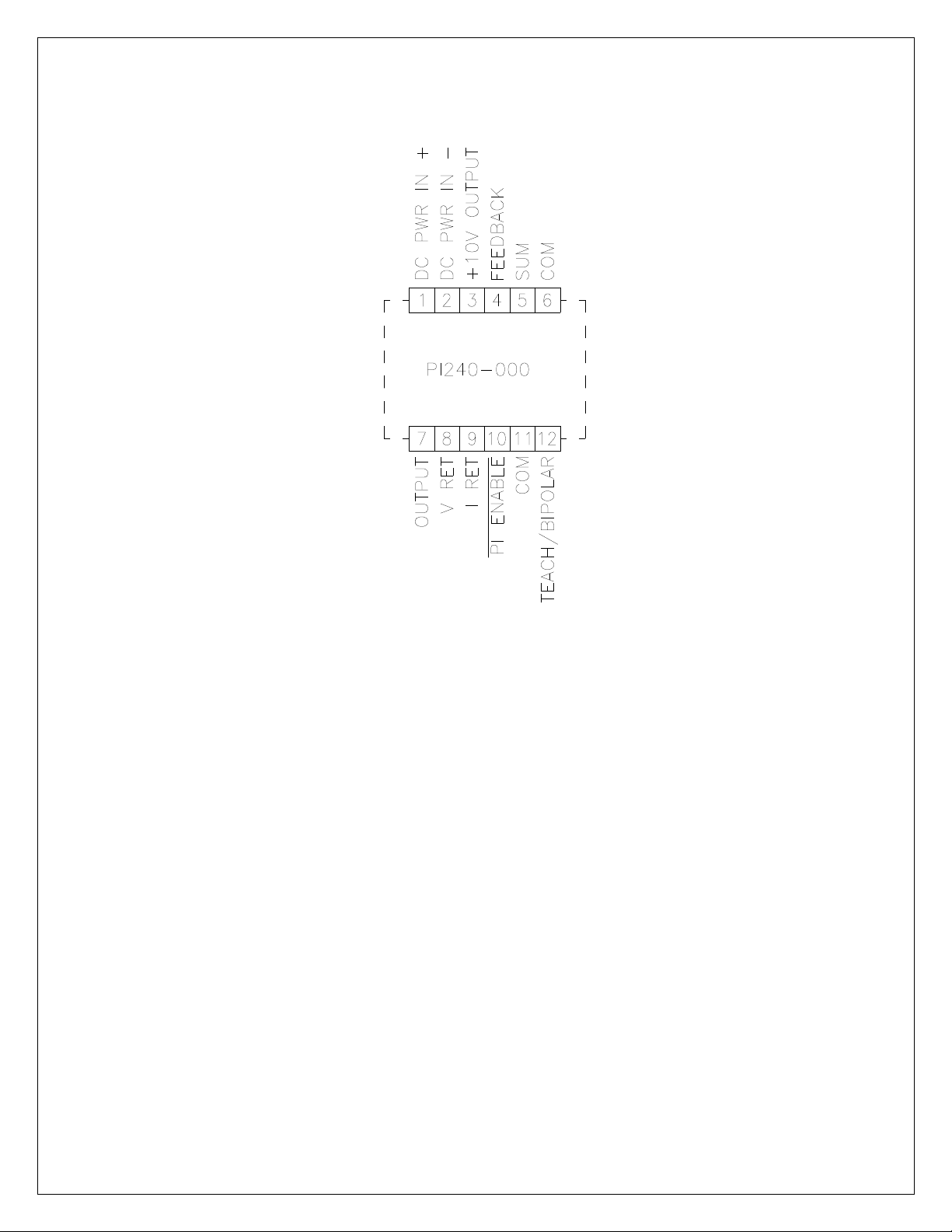
3. Apply power to the PI240-000 Module. Within one minute, connect the Teach
input (terminal 12) to circuit common (terminal 11).
4. For Dancer systems, position the dancer at the other extreme position that should
force the follower drive to decrease in speed. For Loadcell systems, apply the
other extreme signal (either no load of full load) that should cause the follower
drive to decrease in speed.
5. Disconnect the Teach input (terminal 12) from circuit common (terminal 11).
Step 5: Select Bipolar Integral
1
1. Wait at least one minute after applying power to the module and place a jumper
from the Teach input (terminal 12) to circuit common (terminal 11).
Step 6: Speed Match
1. Ensure the enable contact between terminals 10 & 11 is open.
2. Enable the lead and follower drives. Run the lead drive up to maximum desired
speed. The line speed reference signal that is connected to the Summing Input
on terminal 5 should be scaled to a maximum of approx. 8 volts (this allows an
additional 2 volts for the PI component).
3. Since any signal present on the Summing Input is also present on the output, the
follower drive should also be running. Using a handheld tachometer, adjust the
speed of the follower drive until its surface speed matches the lead drive. The
follower drive speed would typically be scaled by using its Max Speed or Analog
Input Gain adjustment.
Step 6: PI Trim
1. Manually force the dancer or loadcell feedback sensor so it is in the “speed up”
state.
2. Enable the PI loop by closing the contact across terminals 10 & 11. Verify that the
module output increases and causes the follower drive to increase in speed.
3. Likewise, manually force the dancer or loadcell feedback sensor so it is in the
“slow down” position and verify that the follower drive decreases in speed.
4. If the module exhibits opposite logic (i.e. increases speed when it should decrease
speed), then repeat Step 4 teaching the feedback levels in the opposite order.
5. With the feedback sensor in the “speed up” state, wait until the PI output saturates
(stops increasing) and adjust the PI Trim potentiometer until the follower drive
achieves the desired overspeed level (typically about 10%).
6. Stop all drives.
Step 7: Tune
1. Set Prop Gain potentiometer approx 8 turns clockwise.
2. Load material and run machine. For dancer systems, adjust the Setpoint
potentiometer to set the desired operating position of the dancer. For loadcell
systems, adjust the Setpoint potentiometer until the desired tension level is
achieved.
3. If necessary, adjust the Prop Gain and Integral Time potentiometers if any
instability is noticed or response time is sluggish.
1
NOTE! An alternate setup to the above would be to configure the PI module for unipolar operation. This
would then only allow the PI to add to the summed Line Speed signal. In this case, the follower drive speed
scaling performed in step 6 should be set slightly slower (5-10%) than the lead drive instead of a speed
match.