Chengdu Ebyte Electronic Technology Co., Ltd. ECAN-101 User Manual
Copyright ©2012–2023,Chengdu Ebyte Electronic Technology Co., Ltd.
1. Overview
1.1 Introduction
ECAN-101 is a small intelligent protocol conversion product independently developed by Chengdu Ebyte Electronic Technology Co., Ltd. The
product uses a wide voltage power supply of 8V ~ 28V and integrates 1 CAN-BUS interface and 1 RS485 interface, which can realize bidirectional
conversion between CAN and RS485 different protocol data. This product supports serial port AT command configuration and host computer
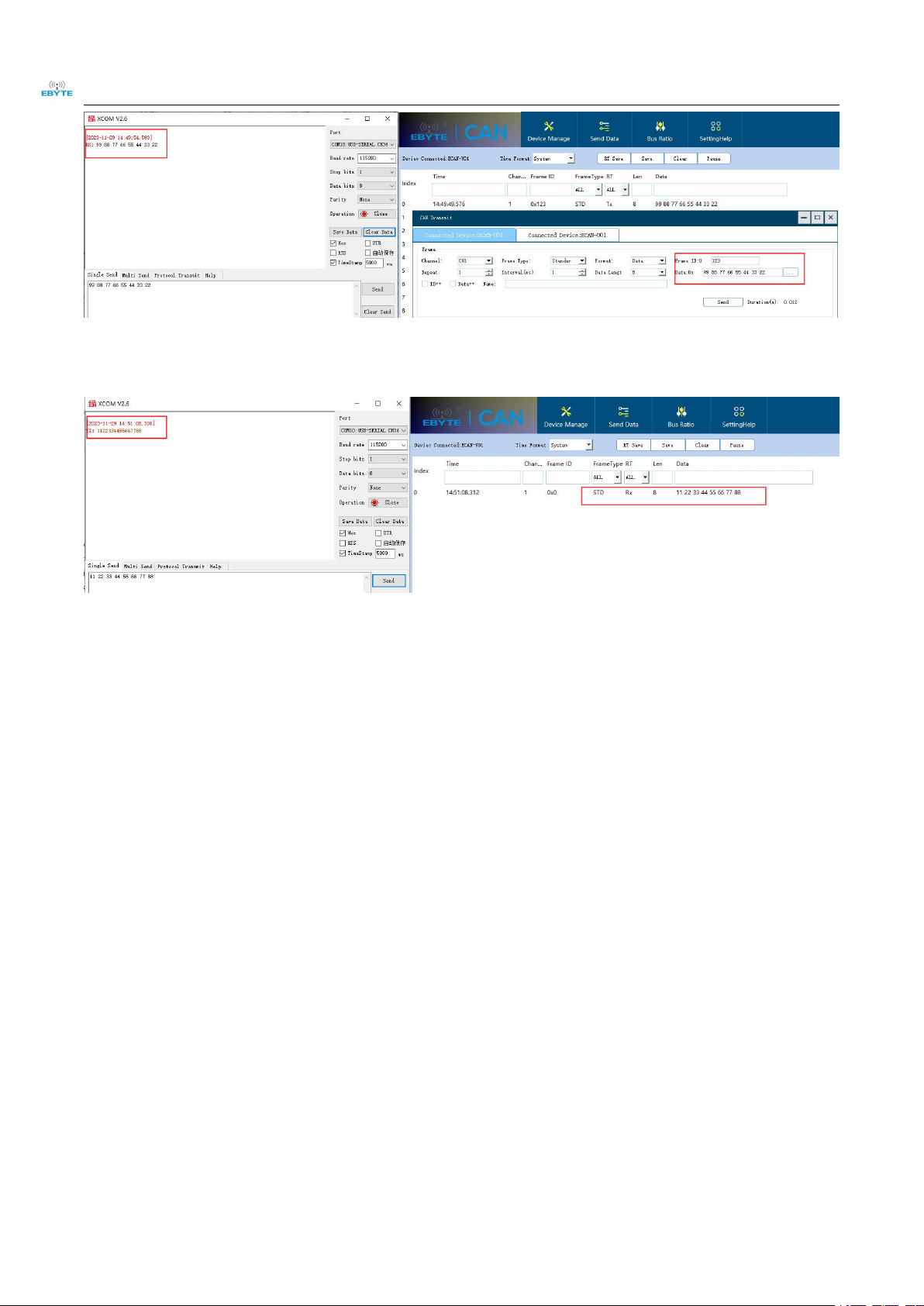
configuration of device parameters and working modes. It supports five data conversion modes: transparent conversion, transparent conversion with
logo, protocol conversion, Modbus RTU conversion, and customization (user). In MODBUS mode, It can play the role of a single CAN interface
replacing multiple 485 lines. At the same time, the ECAN-101 intelligent protocol converter has the characteristics of compact size and easy installation.
It has extremely high cost performance in CAN-BUS product development and data analysis applications. It is a reliable assistant for engineering
applications, project debugging and product development.
1.2 Features and functions
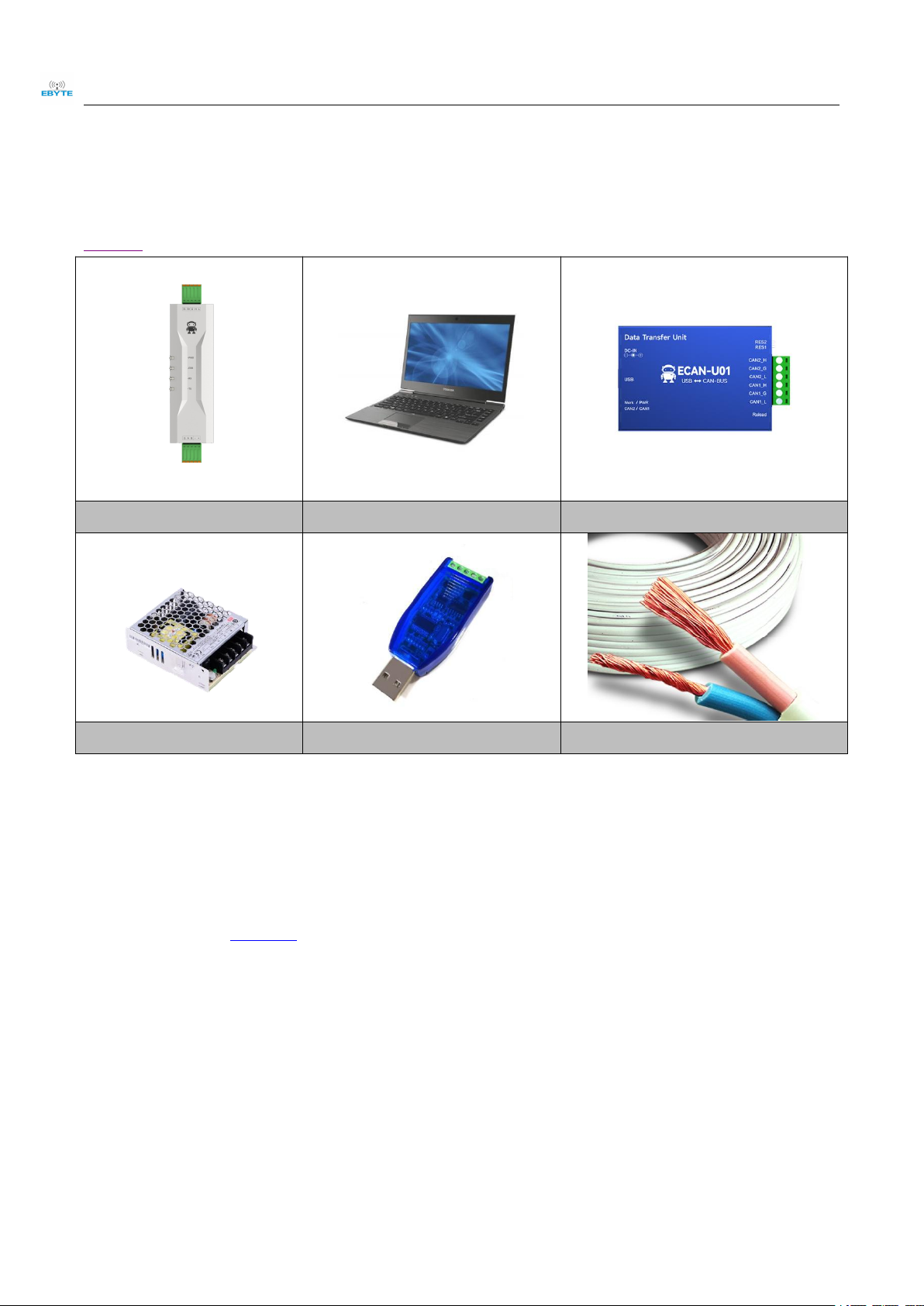
Bidirectional conversion between CAN and RS485 protocol data;
Support transparent conversion, transparent tape identification conversion, protocol conversion, Modbus RTU conversion, and custom
protocol conversion;
Support RS485 interface parameter configuration;
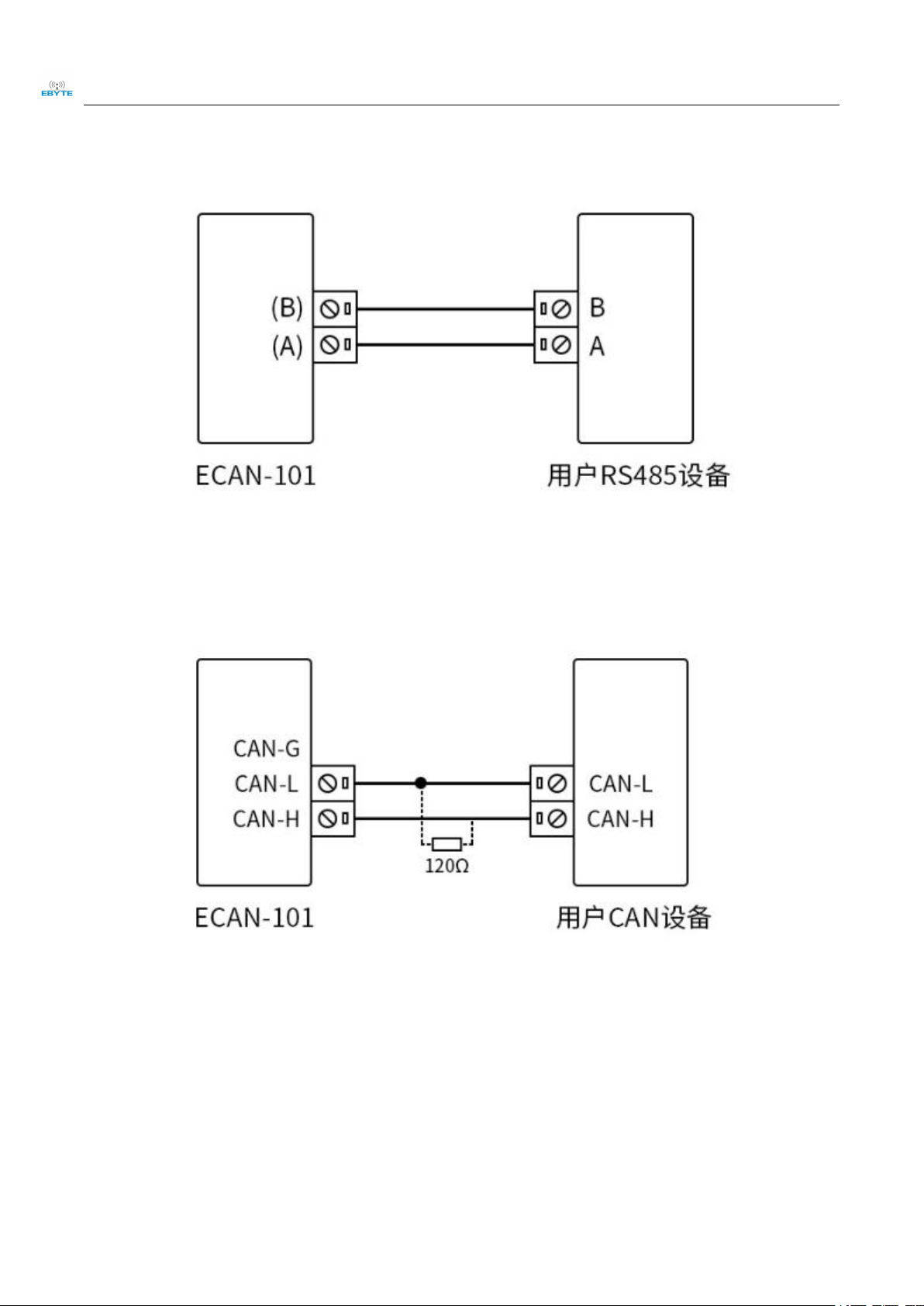
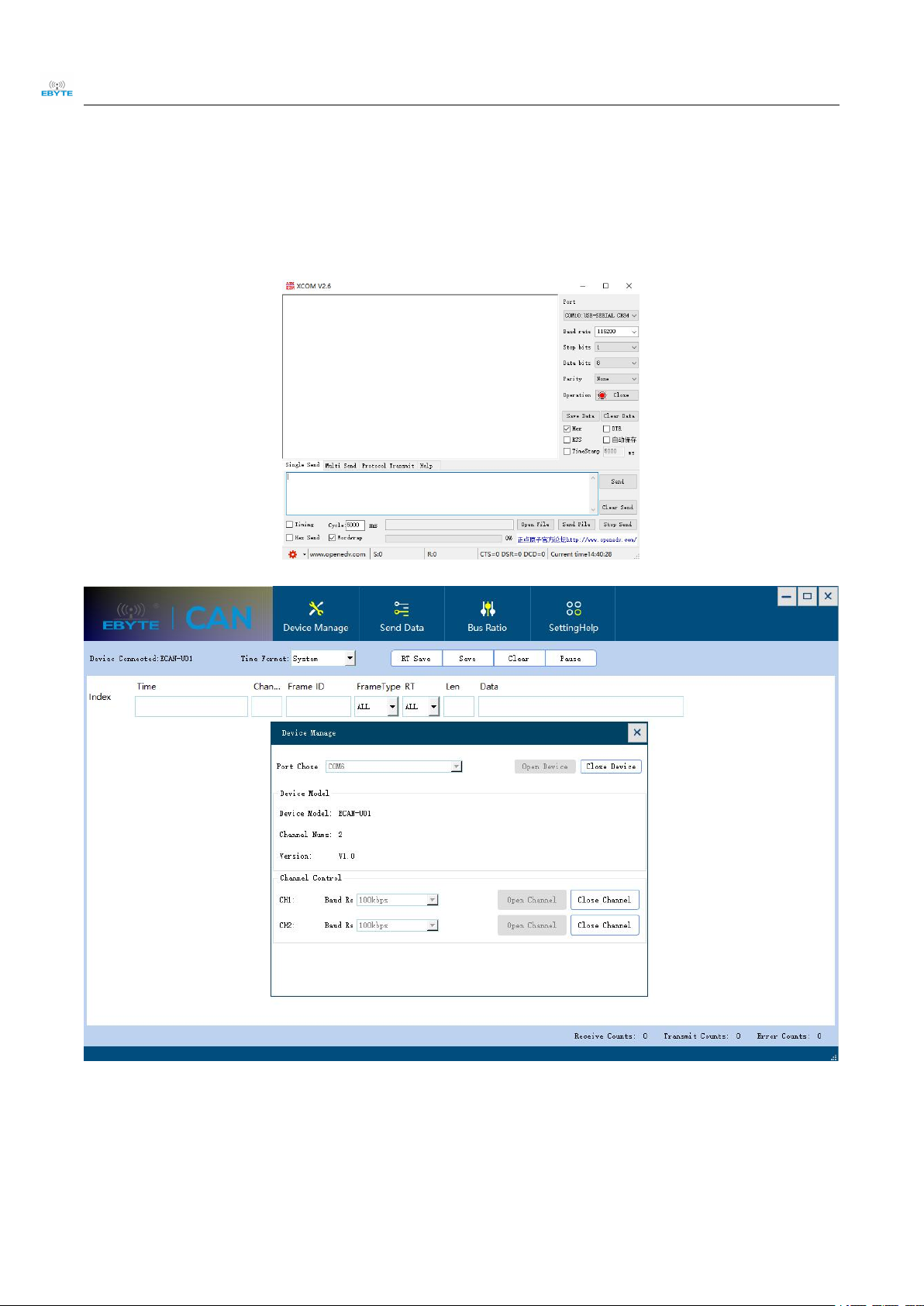
Support the configuration of AT command parameters;
Support the configuration of upper computer parameters;
Support AT commands, upper computer, and button recovery to factory settings;
Equipped with various status indicators such as power indicator light and status indicator light;
Multi master and multi slave function, replacing multi-channel 485 with a single CAN interface;
Equipped with a 120 ohm terminal resistor;
1.3 Application Scenario
Industrial control and other CAN-BUS networks
Networking of Automobile and Railway Equipment
Security and fire protection network
Underground remote communication
Public Address System
Parking lot equipment control
Smart home and smart building