Chengdu Ebyte Electronic Technology Co.,Ltd. ECAN-401 User Manual
Copyright ©2012–2022,Chengdu Ebyte Electronic Technology Co.,Ltd.
CONTENTS
1. PRODUCT OVERVIEW......................................................................................................................................................................... 4
1.1 BRIEF INTRODUCTION..................................................................................................................................................................... 4
1.2 FEATURE.............................................................................................................................................................................................. 4
1.3 APPLICATION...................................................................................................................................................................................... 5
2. PRODUCT SPECIFICATIONS AND CHARACTERISTICS................................................................................................................6
2.1 BASIC PARAMETERS.......................................................................................................................................................6
2.2 FACTORY DEFAULT PARAMETERS................................................................................................................................... 6
3. HARDWARE PARAMETER DESIGN INTRODUCTION................................................................................................................... 7
3.1 DESIGN INTRODUCTION................................................................................................................................................. 7
3.2 DIMENSIONS.................................................................................................................................................................. 8
3.3 CONNECTION METHOD...................................................................................................................................................9
3.3.1 RS485 connection method......................................................................................................................................
9
3.3.2 RS422 connection method......................................................................................................................................
9
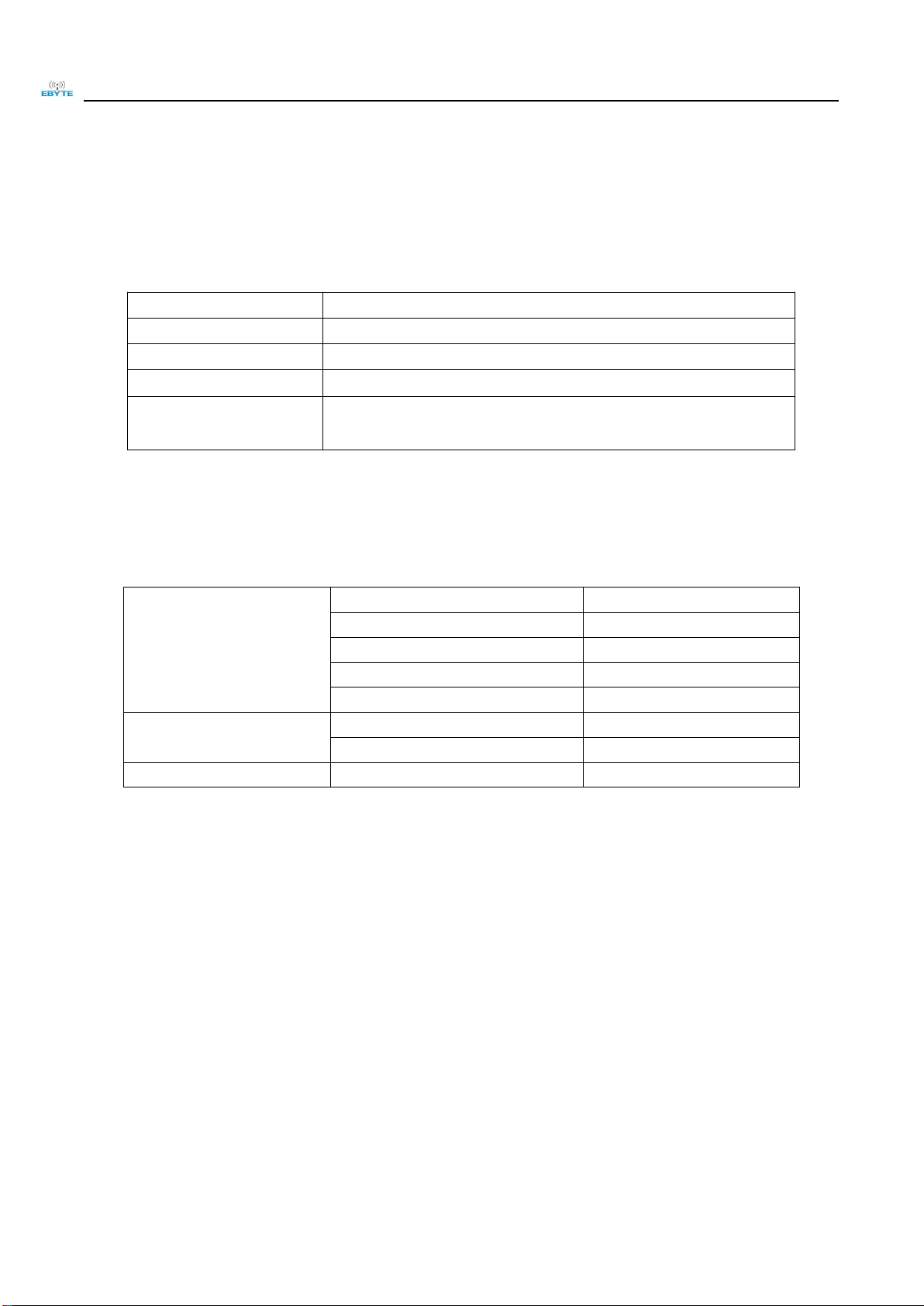
3.3.3 RS232 connection method....................................................................................................................................
10
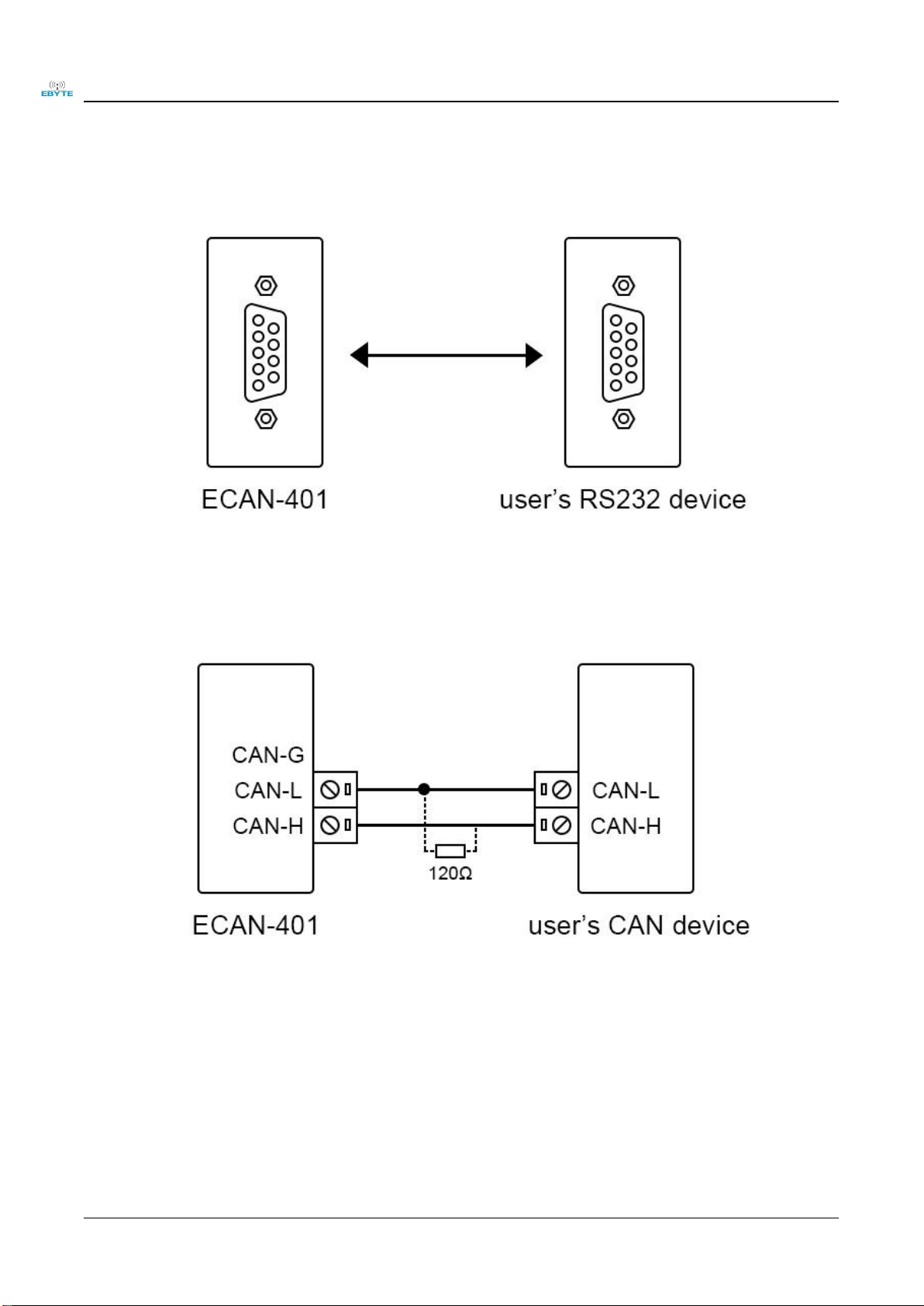
3.3.4 CAN connection method.......................................................................................................................................
10
4. MODE DESCRIPTION......................................................................................................................................................................... 11
4.1 DATA CONVERSION METHOD........................................................................................................................................11
4.1.1 Transparent conversion mode..............................................................................................................................
11
4.1.2 Transparent transmission with logo mode...........................................................................................................
14
4.1.3 Protocol mode......................................................................................................................................................
16
4.1.4 Modbus mode.......................................................................................................................................................
18
4.1.5 Custom protocol mode..........................................................................................................................................
20
5. AT COMMAND.....................................................................................................................................................................................23
5.1 ENTER AT COMMAND.................................................................................................................................................. 23
5.2 EXIT AT COMMAND..................................................................................................................................................... 23
5.3 QUERY VERSION.......................................................................................................................................................... 24
5.4 RESTORE DEFAULT PARAMETERS................................................................................................................................. 24
5.5 ECHO SETTINGS........................................................................................................................................................... 24
5.6 SERIAL PORT PARAMETERS.......................................................................................................................................... 25
5.7 SETTING/QUERYING CAN INFORMATION.................................................................................................................... 26
5.8 SETTING/QUERYING MODULE CONVERSION MODE....................................................................................................26
5.9 SET/QUERY THE FILTERING MODE OF THE CAN BUS...................................................................................................27
5.10 SET/QUERY FRAME HEADER AND FRAME END DATA..................................................................................................27
5.11 SETTING/QUERYING IDENTIFICATION PARAMETERS.................................................................................................. 27
5.12 SETTING/QUERYING IDENTIFICATION PARAMETERS..................................................................................................28
5.13 SET/QUERY TRANSMISSION DIRECTION......................................................................................................................28
5.14 SETTING/QUERYING FILTER PARAMETERS................................................................................................................ 29
5.15 DELETE THE FILTER PARAMETERS THAT HAVE BEEN SET........................................................................................... 29
6. REVISION HISTORY........................................................................................................................................................................... 30
ABOUT US................................................................................................................................................................................................30