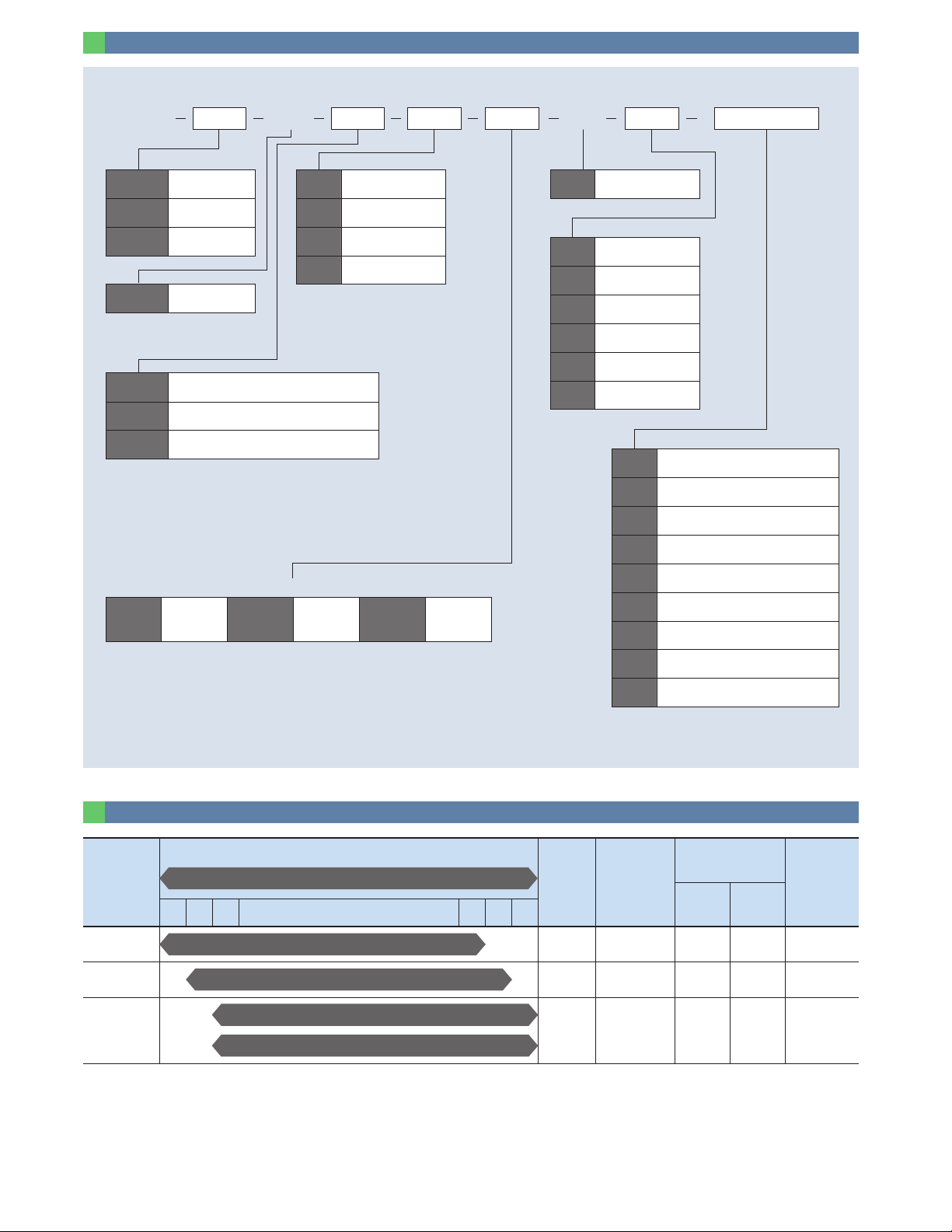
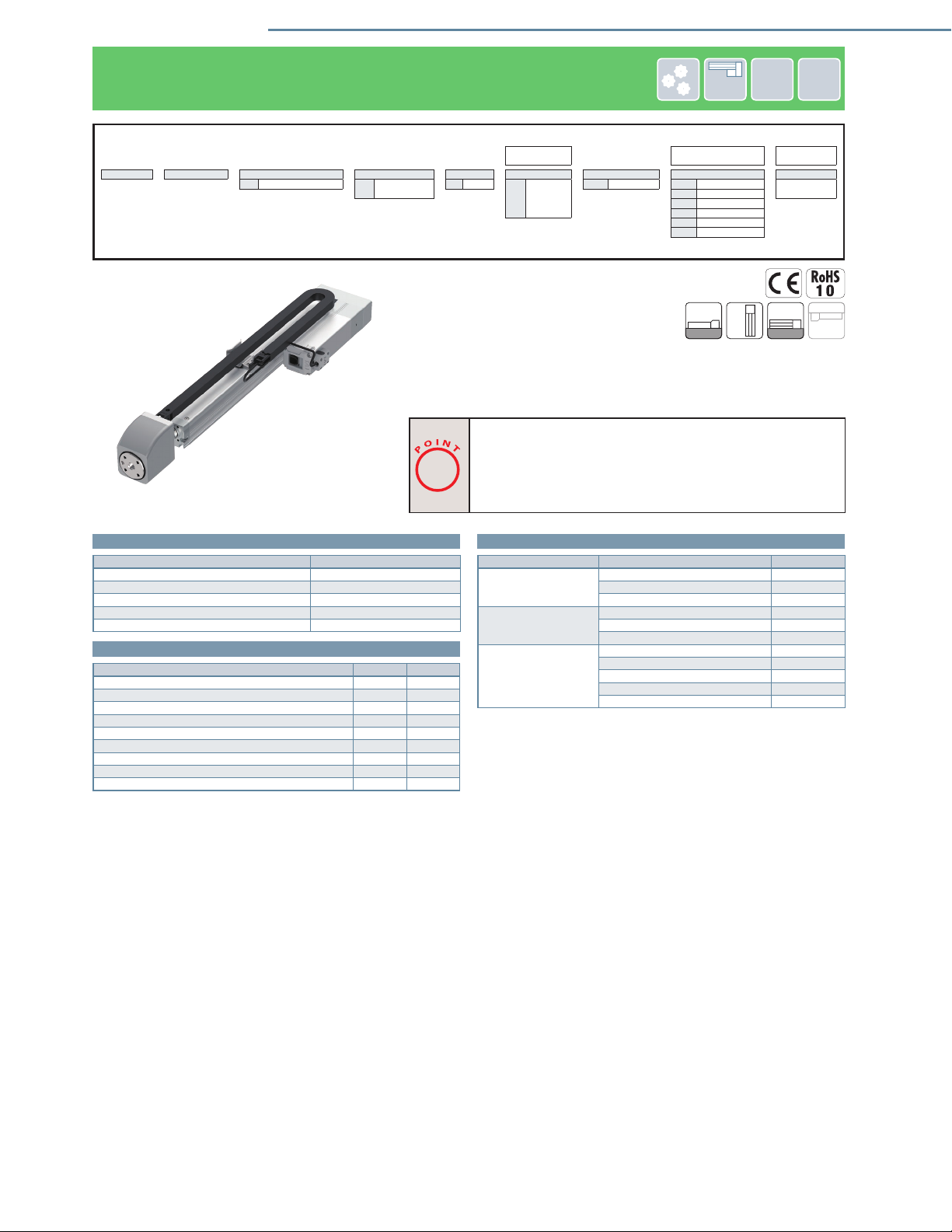
RCP6 ROBO Cylinder®
Item Description
Lead Ball screw lead (mm) 2.5
Horizontal
Payload
Maximum payload (kg)
(high-output enabled) 3
Maximum payload (kg)
(high-output disabled) 3
Speed /
acceleration/
deceleration
Max. speed (mm/s) 200
Rated acceleration/deceleration (G)
0.5
Max. acceleration/deceleration (G)
0.5
Vertical
Payload
Maximum payload (kg)
(high-output enabled) 3
Maximum payload (kg)
(high-output disabled) 3
Speed /
acceleration/
deceleration
Max. speed (mm/s) 200
Rated acceleration/deceleration (G)
0.5
Max. acceleration/deceleration (G)
0.5
Push
Max. push force (N) 300
Min. push force (N) 60
Max. push speed (mm/s) 10
Pull
Max. pull force (N) 300
Min. pull force (N) 60
Max. pull speed (mm/s) 10
Brake Brake specification Non-excitation actuating
solenoid brake
Brake holding force (kg) 3
Stroke
Min. stroke (mm) 110
Max. stroke (mm) 310
Stroke pitch (mm) 50
■Main Specifications
Item Description
Drive system Ball screw, φ8mm, rolled C10
Positioning repeatability ±0.02mm
Lost motion 0.1mm or less
Load cell rated capacity 600N
Loading repeatability (Note 6) ±1.0% F.S. (Note 7)
Ambient operating
temperature, humidity 0 ~ 40°C, 85%RH or less (no condensation)
Ingress protection IP20
Vibration & shock resistance 4.9m/s2
Overseas standards CE marking, RoHS directive
Motor type Stepper motor
Encoder type Battery-less absolute
Number of encoder pulses 8192 pulse/rev
(Note 6) Ratio (in percentage) of the load variations caused by the repeated operations to
the load cell rated capacity.
(Note 7) F.S.: Full Scale, the maximum measurable value.
■Tables of Payload by Speed/Acceleration
■High-output setting enabled (the unit for payload is kg)
Orientation Horizontal Vertical
Speed
(mm/s)
Acceleration (G)
0.5 0.5
0 3 3
40 3 3
85 3 3
130 3 3
150 3 3
200 3 3
■High-output setting disabled (the unit for payload is kg)
Orientation Horizontal Vertical
Speed
(mm/s)
Acceleration (G)
0.5 0.5
0 3 3
40 3 3
85 3 3
130 3 3
150 3 3
■Stroke and Max Speed
High-output
setting
Stroke (mm)
110 160 210 260 310
Enabled 200
Disabled 150
(Unit: mm/s)
0
50
100
150
200
250
300
350
0 20 40 60 80 100
■C
orrelation diagram between push force and push command value
0
50
100
150
200
250
300
0 20 40 60 80 100
■C
orrelation diagram between pull force and pull command value
RCP6-RRA4R 6