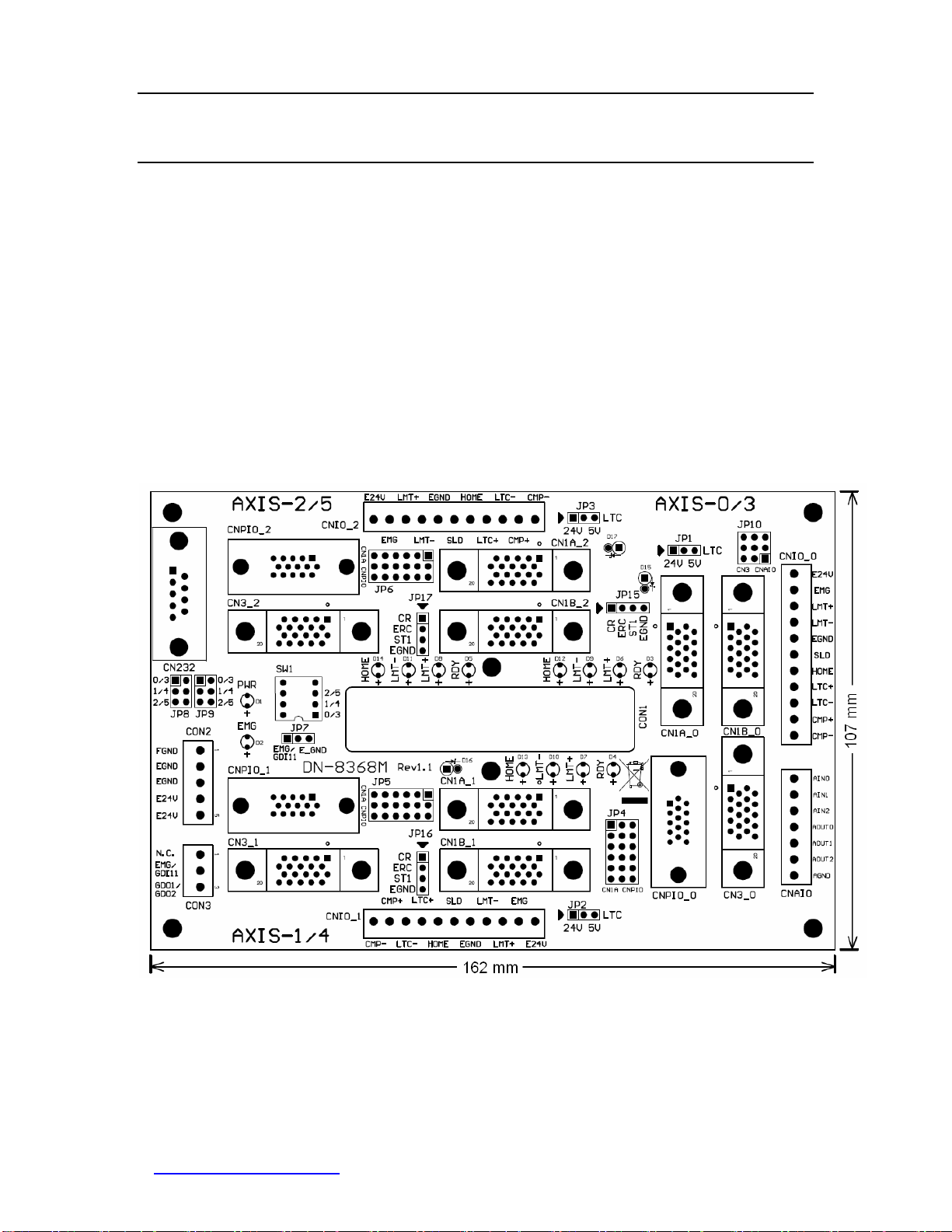
http://www.icpdas.com DN-8368MB User Manual V 1.0 7
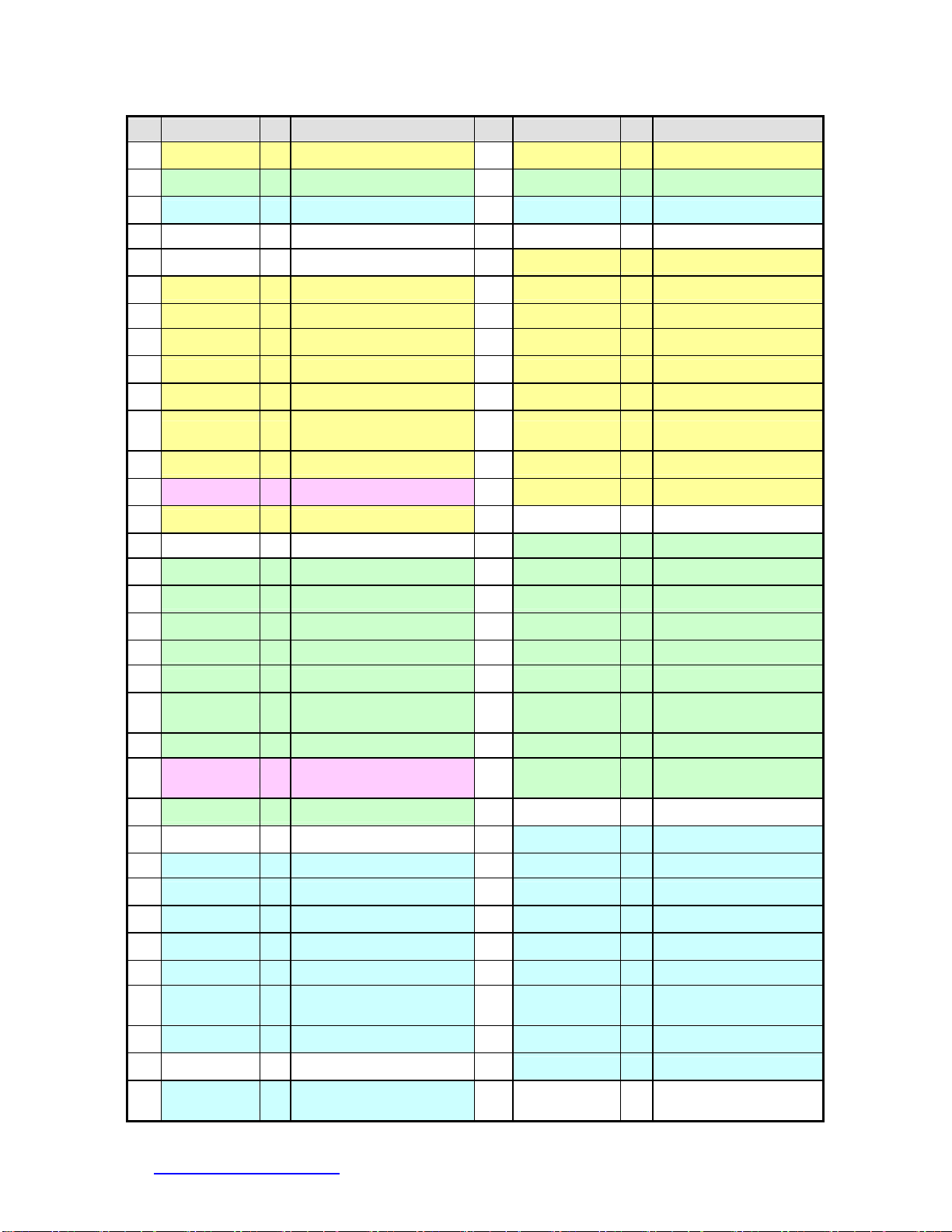
Table 1-2 CN1B (be distances from PCB)
No. Name I/O Function Axis No. Name I/O Function Axis
1 AOUT3 O Analog Output 35 AIN3 IAnalog Input
2 AOUT4 O Analog Output 36 AIN4 IAnalog Input
3 AOUT5 O Analog Output 37 AIN5 IAnalog Input
4 AGND - Analog Ground 38 AGND - Analog Ground
5 DGND - Digital Ground 39 ERC3 OError Counter Clear
6 LTC3 I Position Latch 40 SVON3 OServo On
7 EA3 I Encoder A-Phase 41 RDY3 IServo Ready
8 EB3 I Encoder B-Phase 42 INP3 IServo In-Position
9 EZ3 I Encoder Z-Phase 43 ALM3 IServo Alarm
10 CW3 O Clockwise pulse 44 SLD3 ISlow Down
11 CCW3 O Counter-Clockwise
pulse 45 ORG3 IOrigin Signal
12 CMP3 O Compare Trigger 46 MEL3 IMinus End Limit
13 GDI11 I Generic Digital Input 47 PEL3 IPositive End Limit
14 ALMRST3 O Servo Alarm Reset 48 DGND - Digital Ground
15 DGND - Digital Ground 49 ERC4 OError Counter Clear
16 LTC4 I Position Latch 50 SVON4 OServo On
17 EA4 I Encoder A-Phase 51 RDY4 IServo Ready
18 EB4 I Encoder B-Phase 52 INP4 IServo In-Position
19 EZ4 I Encoder Z-Phase 53 ALM4 IServo Alarm
20 CW4 O Clockwise pulse 54 SLD4 ISlow Down
21 CCW4 O Counter-Clockwise
pulse 55 ORG4 IOrigin Signal
22 CMP4 O Compare Trigger 56 MEL4 IMinus End Limit
23 GDO2 O Generic Digital
Output 57 PEL4 IPositive End Limit
24 ALMRST4 O Servo Alarm Reset 58 DGND - Digital Ground
25 DGND - Digital Ground 59 ERC5 OError Counter Clear
26 LTC5 I Position Latch 60 SVON5 OServo On
27 EA5 I Encoder A-Phase 61 RDY5 IServo Ready
28 EB5 I Encoder B-Phase 62 INP5 IServo In-Position
29 EZ5 I Encoder Z-Phase 63 ALM5 IServo Alarm
30 CW5 O Clockwise pulse 64 SLD5 ISlow Down
31 CCW5 O Counter-Clockwise
pulse 65 ORG5 IOrigin Signal
32 CMP5 O Compare Trigger 66 MEL5 IMinus End Limit
33 DGND - Digital Ground 67 PEL5 IPositive End Limit
34 ALMRST5 O Servo Alarm Reset 68 VCC - 5V Digital Power
from Bus