Table of contents
About this document....................................................................................................................... 1
Table of contents............................................................................................................................ 2
1Introduction .......................................................................................................................... 3
1.1 Overview..................................................................................................................................................3
1.1.1 Hardware and third-party software ..................................................................................................3
1.1.2 Quad-state input pins ........................................................................................................................3
1.1.3 SPI communication............................................................................................................................4
1.2 Key features.............................................................................................................................................4
1.3 Potential applications.............................................................................................................................4
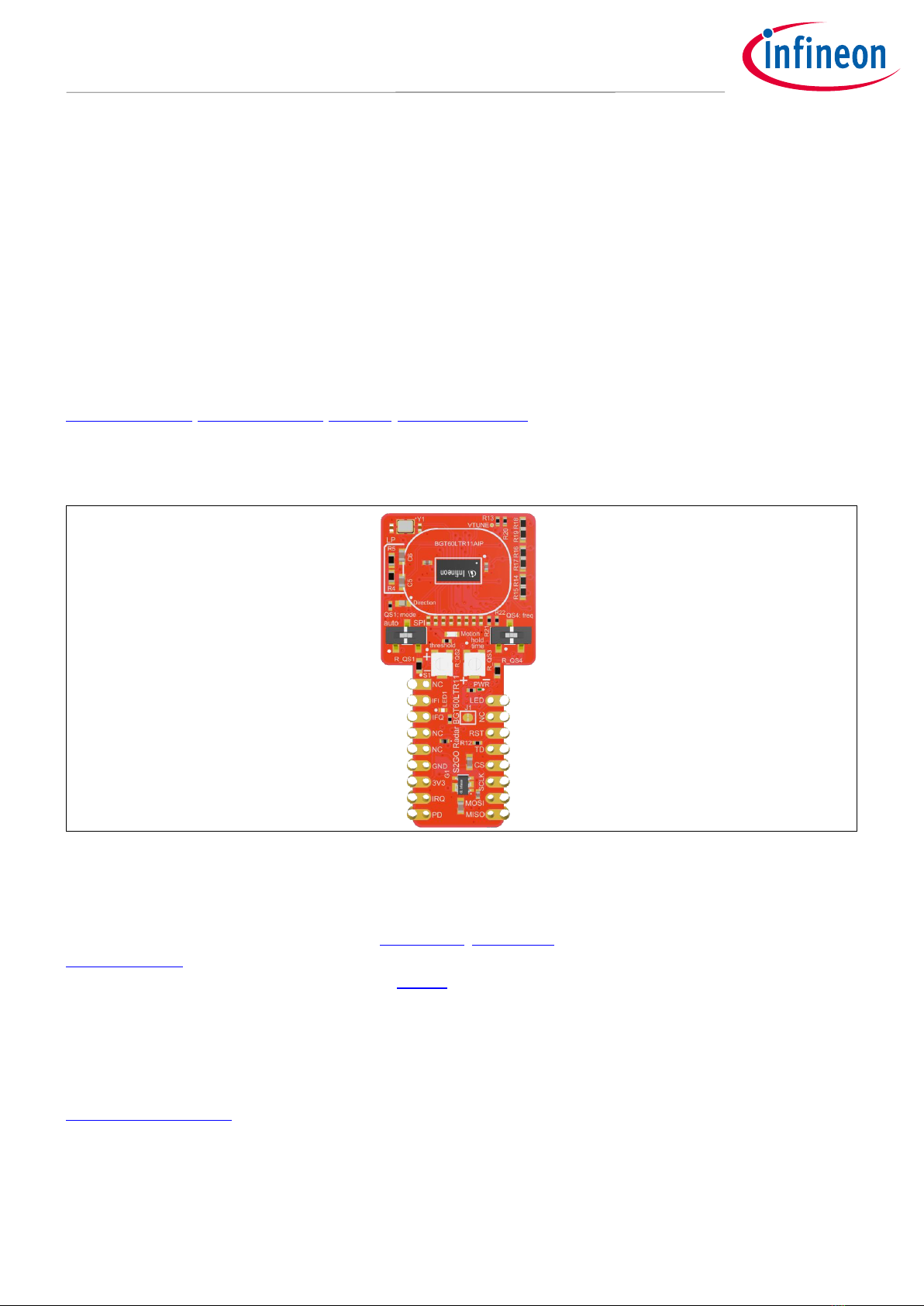
2Board and pin-out overview .................................................................................................... 5
2.1 Board dimensions ...................................................................................................................................6
3Getting started ...................................................................................................................... 7
3.1 Overview..................................................................................................................................................7
3.2 Hardware setup.......................................................................................................................................7
3.3 Software setup ......................................................................................................................................10
3.3.1 Required software for Infineon’s XMC™ boards..............................................................................10
3.3.2 Required software for Arduino ........................................................................................................10
3.3.3 Installation instructions for XMC™microcontrollers ......................................................................10
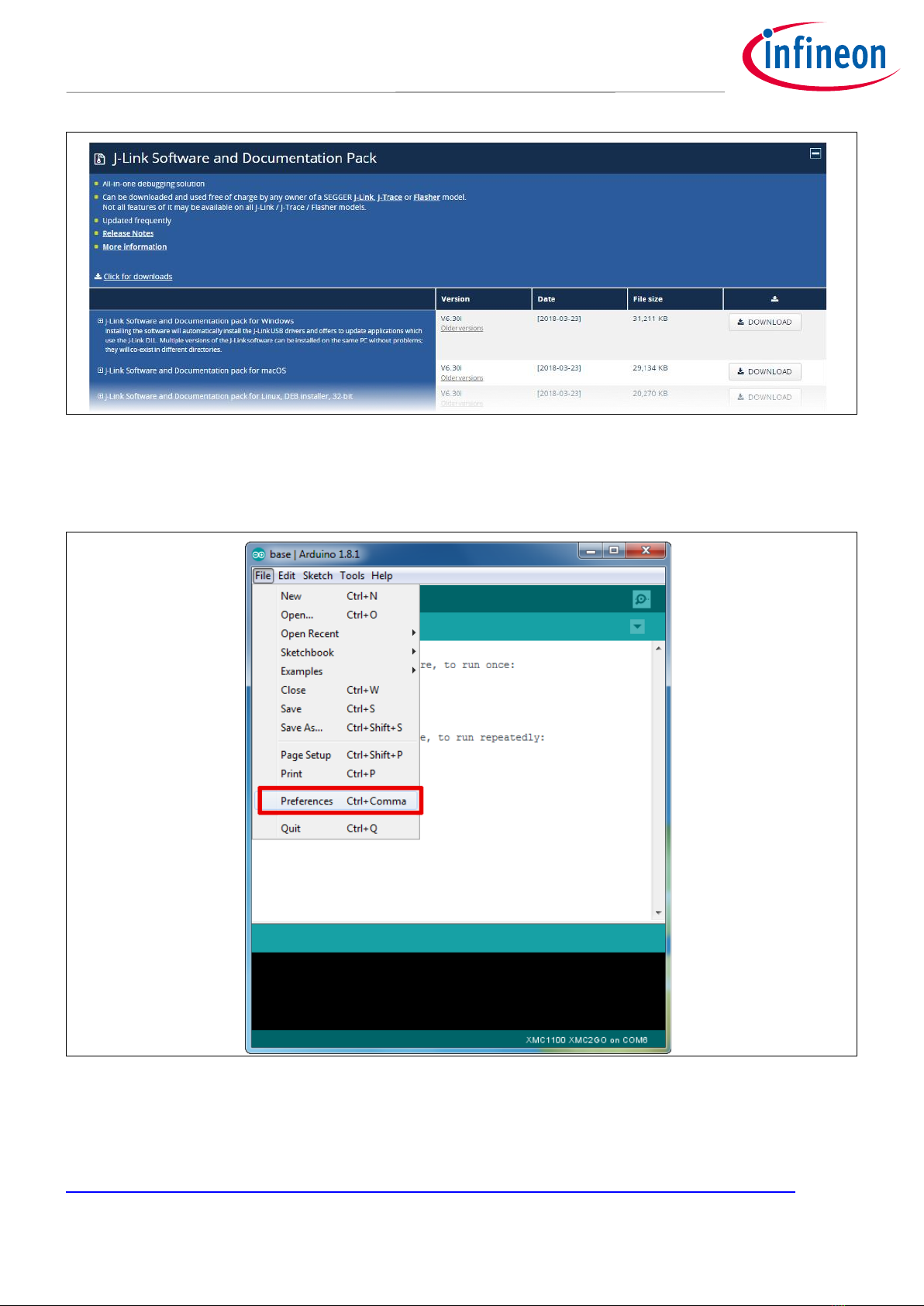
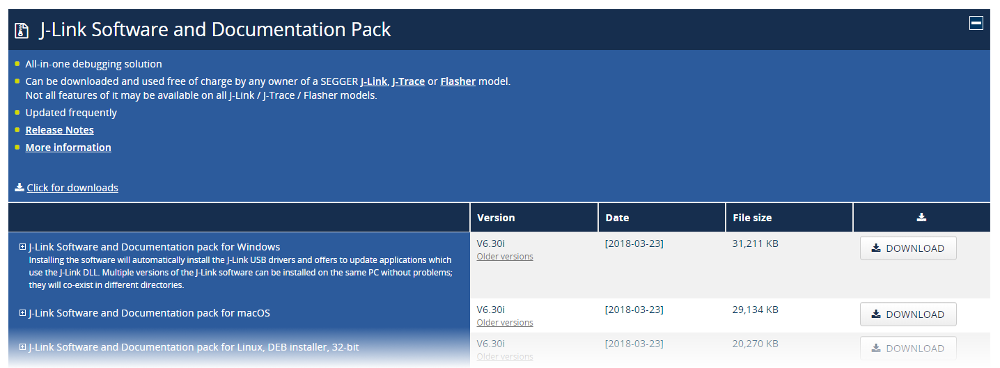
3.3.3.1 Prework for SEGGER J-Link ........................................................................................................10
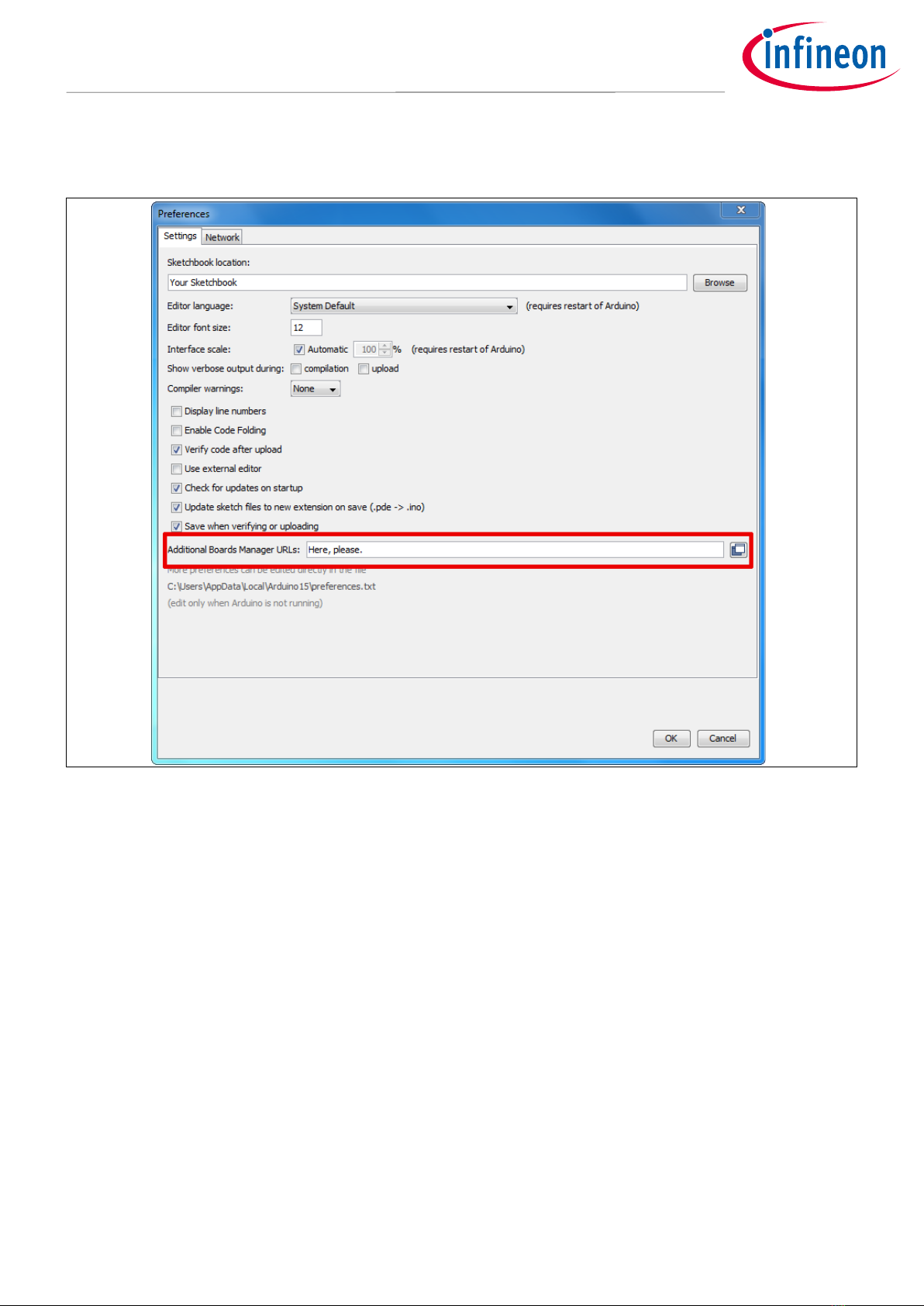
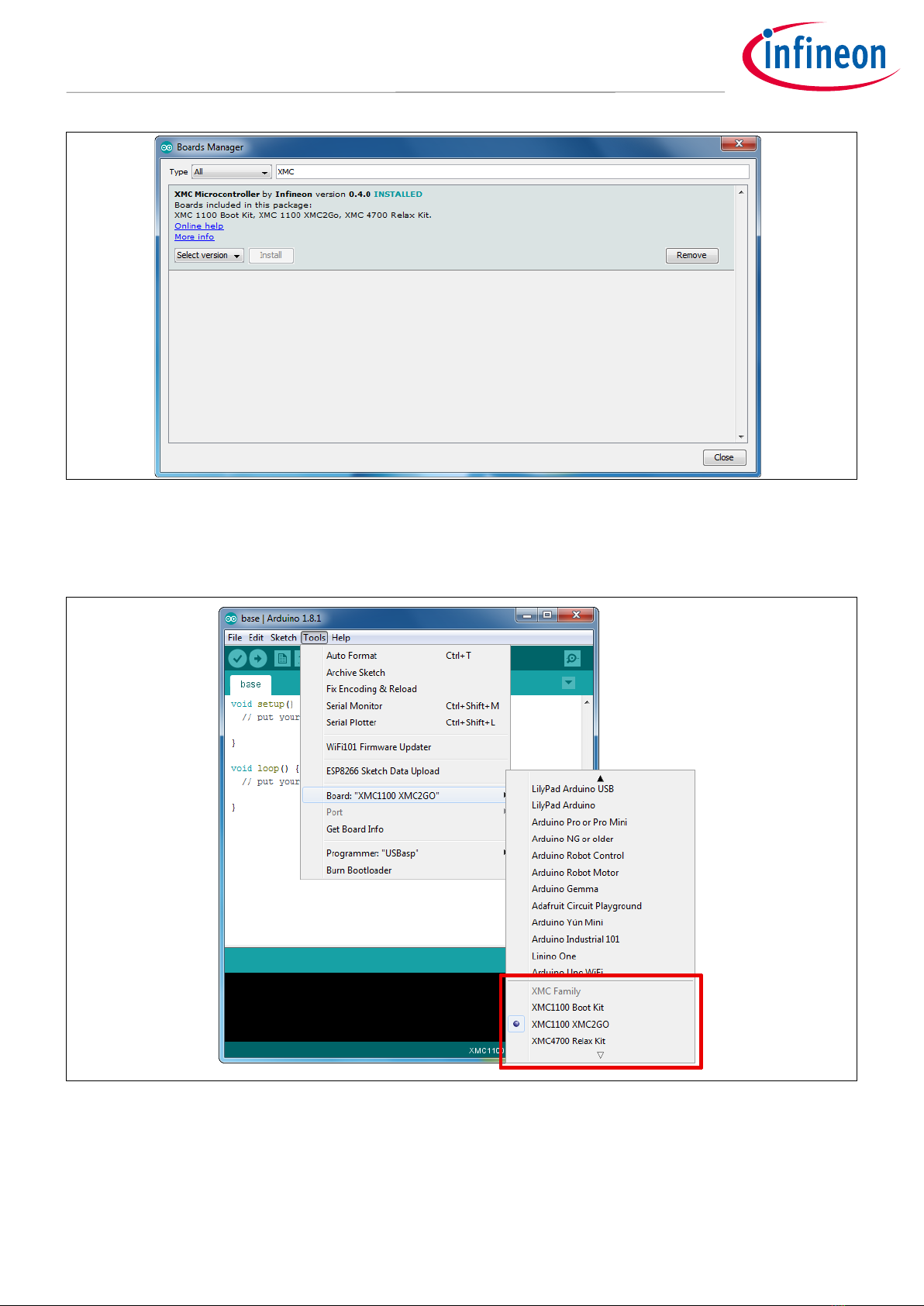
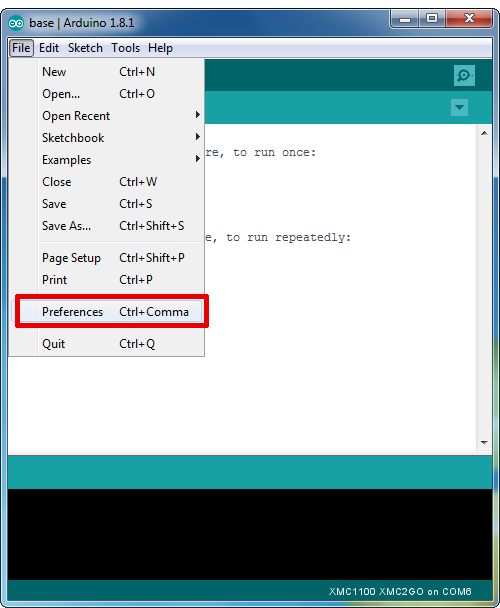
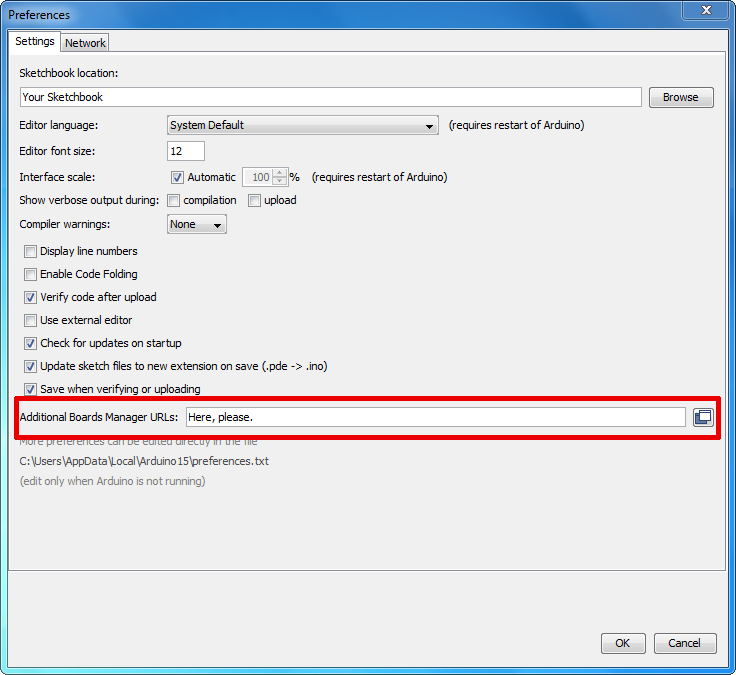
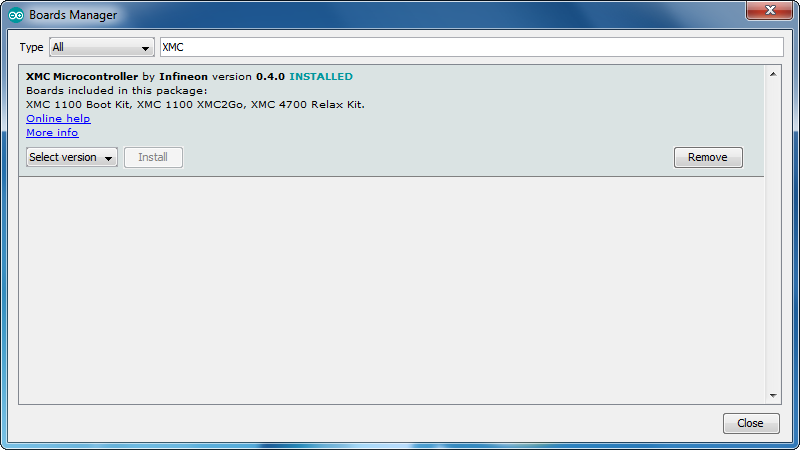
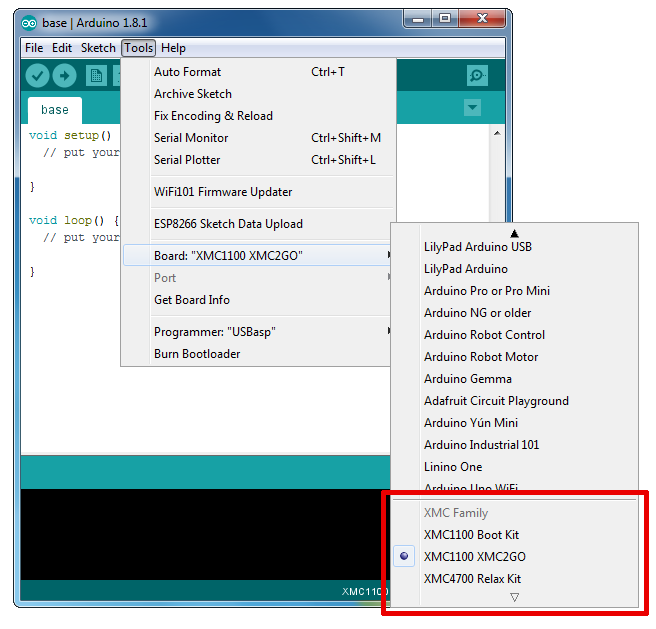
3.3.3.2 Using Arduino IDE with XMC™microcontroller..........................................................................11
4Radar modes setup................................................................................................................15
4.1 TD and PD signals..................................................................................................................................15
4.2 “Advance mode” and quad-state inputs..............................................................................................15
4.2.1 “Advance mode” ..............................................................................................................................15
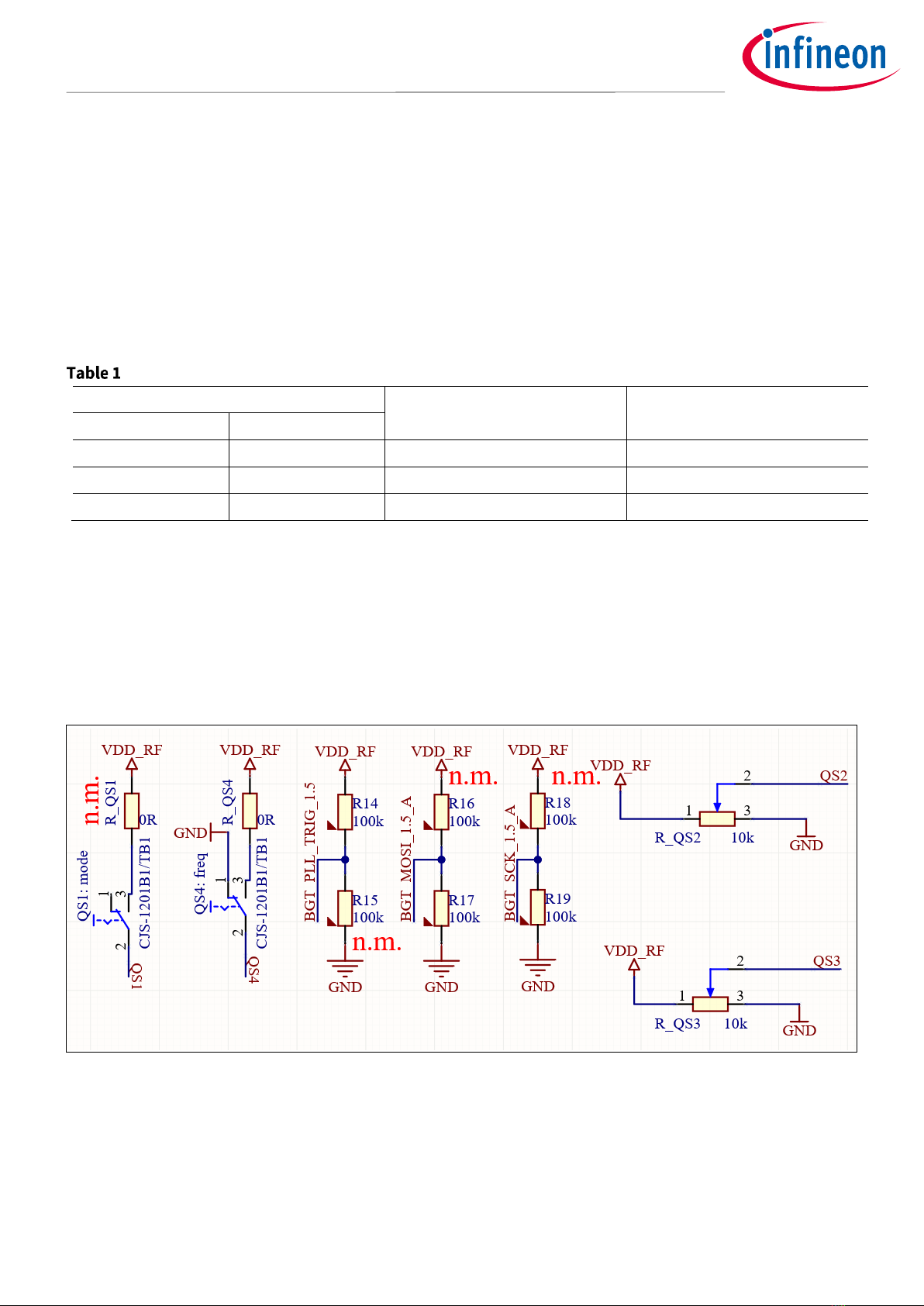
4.2.2 Quad-state basics for adjustable QS1 to QS4 signals.....................................................................16
4.2.3 QS1 –MMIC operation modes..........................................................................................................17
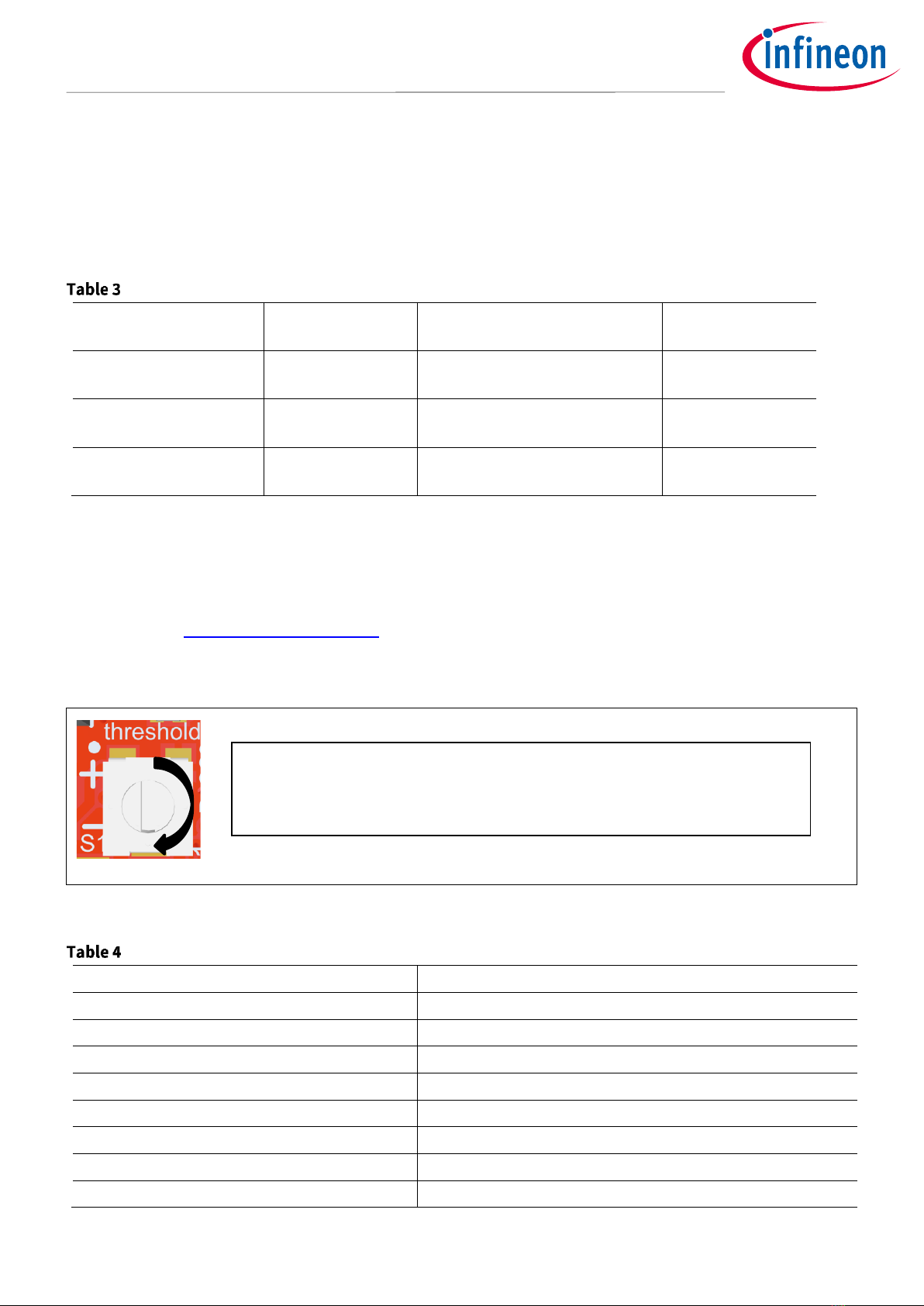
4.2.4 QS2 –detector threshold.................................................................................................................17
4.2.5 QS3 –detector hold time .................................................................................................................18
4.2.6 QS4 –operating frequency ..............................................................................................................20
5Hardware circuits..................................................................................................................21
5.1 Power supply.........................................................................................................................................21
5.2 Level shifters..........................................................................................................................................21
5.3 LEDs .......................................................................................................................................................22
5.1 Crystal oscillator....................................................................................................................................23
5.2 External capacitors................................................................................................................................24
6PCB design ...........................................................................................................................26
6.1 Layer stack-up and routing...................................................................................................................26
6.2 Bill of materials......................................................................................................................................26
6.3Schematics ............................................................................................................................................27
7References ...........................................................................................................................30
Revision history.............................................................................................................................31
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











