GB - 3
Table of Contents
1. Preface..............................................................................................................5
1.1 General ................................................................................................................................. 5
1.2 Safety Instructions .............................................................................................................. 5
1.3 Validity and liability ............................................................................................................. 5
1.4 Copyright.............................................................................................................................. 6
1.5 Speciedapplication........................................................................................................... 6
1.6 Product description............................................................................................................. 6
2. Control..............................................................................................................8
2.1 Features of the control........................................................................................................ 8
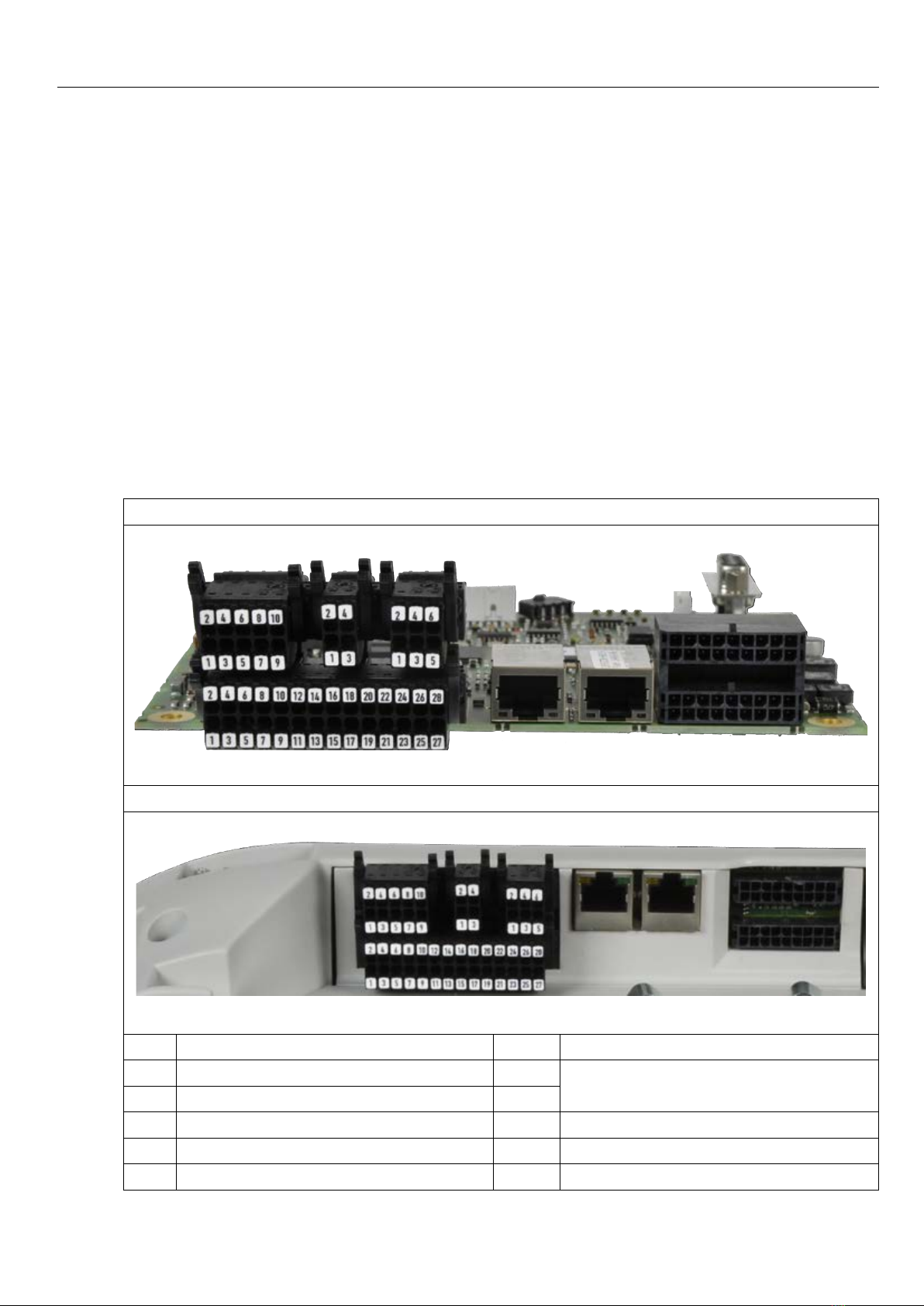
2.2 Overview............................................................................................................................... 8
2.2.1 Control terminal strip X2A...................................................................................................... 9
2.2.2 Safety terminal block X2B...................................................................................................... 9
2.2.3 CAN terminal block X2C ........................................................................................................ 9
2.2.4 Analog inputs X2D ................................................................................................................ 9
2.2.5 Diagnostic interface X4A........................................................................................................ 9
2.2.6 Encoder interfaces X3A, X3B ................................................................................................ 9
2.3 Connection of the control ................................................................................................. 10
2.3.1 Assembly of the wires.......................................................................................................... 10
2.4 Assignment of the terminal strip X2A...............................................................................11
2.4.1 Connection of the digital inputs............................................................................................ 12
2.4.2 Connection of the digital outputs ......................................................................................... 12
2.5 Assignment of the STO terminal strip X2B ..................................................................... 13
2.5.1 Inputs ................................................................................................................................... 13
2.5.1.1 SpecicationoftheSTOinputs ........................................................................................... 13
2.5.1.2 STOwithOSSDsignals....................................................................................................... 13
2.5.2 OutputSTO.......................................................................................................................... 13
2.6 Assignment of the CAN terminal strip X2C..................................................................... 14
2.7 Assignment of the terminal strip for analog inputs X2D ............................................... 14
2.7.1 Connection of the analog inputs .......................................................................................... 14
2.7.2 Diagnosis/visualisation ........................................................................................................ 15
2.7.2.1 Assignment of the interface X4A.......................................................................................... 15
2.7.2.2 Connection of the RS232 interface...................................................................................... 15
2.7.2.3 Connection of the RS485 interface...................................................................................... 15
2.7.2.4 Wiring RS485 full duplex ..................................................................................................... 16
2.7.2.5 Wiring RS485 half duplex .................................................................................................... 16
2.8 Socket X4C EtherCAT IN and X4B EtherCAT OUT.......................................................... 17
2.9 Encoder Parameter............................................................................................................ 17
2.9.1 Encoder interfaces X3A and X3B ........................................................................................ 18
3. Safety Function STO .....................................................................................19
3.1 Emergency stop according EN 60204 .............................................................................. 20
3.2 ClassicationofSTOaccordingIEC61508 ..................................................................... 21
3.3 ClassicationofSTOaccordingENISO13849 ............................................................... 21
3.4 Additional instructions...................................................................................................... 21
3.5 Functional Description...................................................................................................... 22
3.6 Wiring Examples................................................................................................................ 23