Contents
Chapter 1 Preview...................................................................................................................................................... 3
1.1, Introduction .................................................................................................................................................. 3
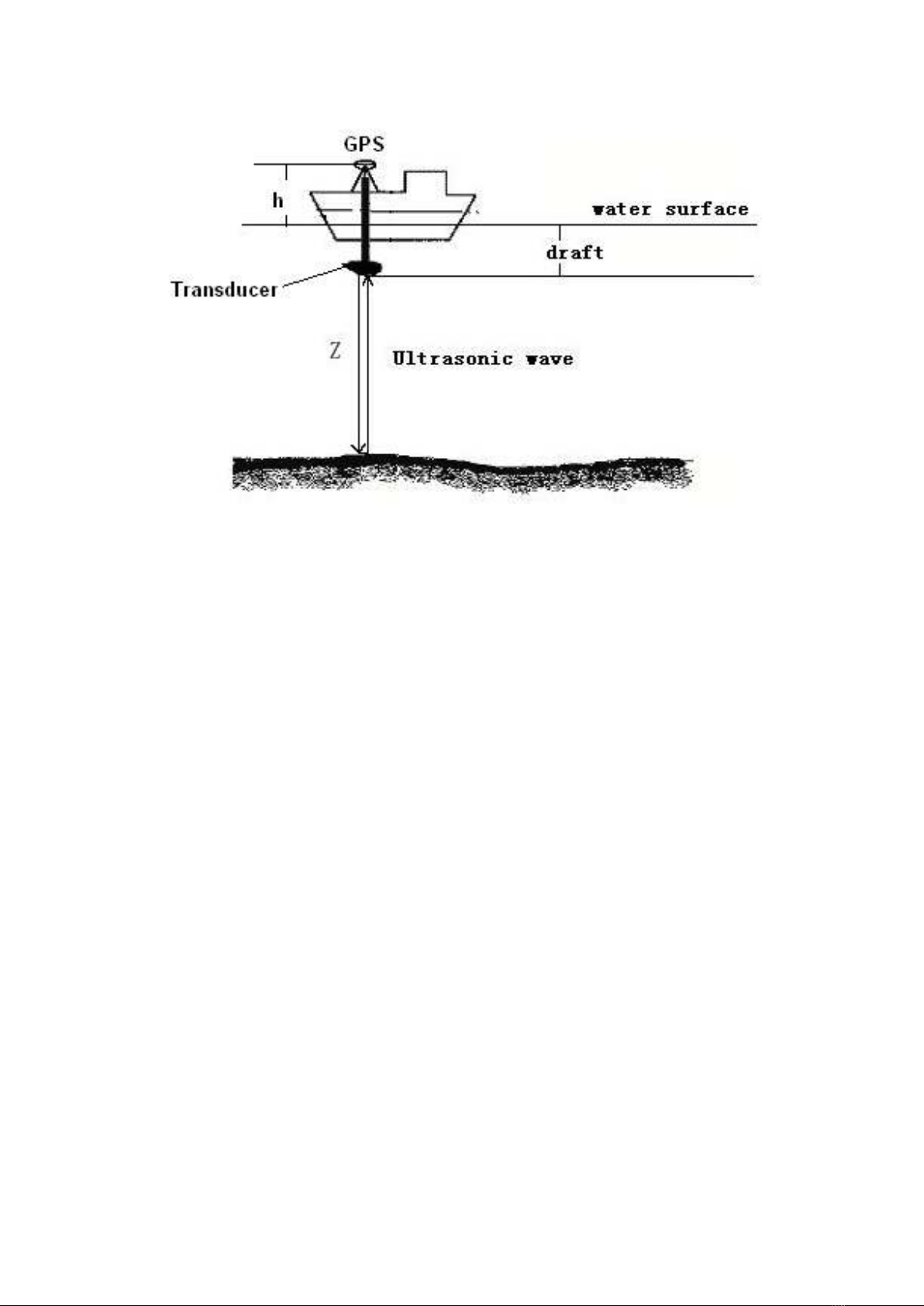
1.2, Echo Sounding Principles.............................................................................................................................. 3
Chapter 2 SDE-28S+ Hardware................................................................................................................................. 5
2.1, Front components......................................................................................................................................... 5
2.2, Side components .......................................................................................................................................... 6
2.3, Accessories ................................................................................................................................................... 7
2.3.1, Transducer........................................................................................................................................ 7
2.3.2, Transducer pole................................................................................................................................ 7
2.3.3, Power supply cable/adapter........................................................................................................... 8
2.3.4, I/O devices........................................................................................................................................ 8
2.3.5, Instrument case................................................................................................................................ 9
Chapter 3 Software................................................................................................................................................... 10
3.1, EchoSounder............................................................................................................................................... 10
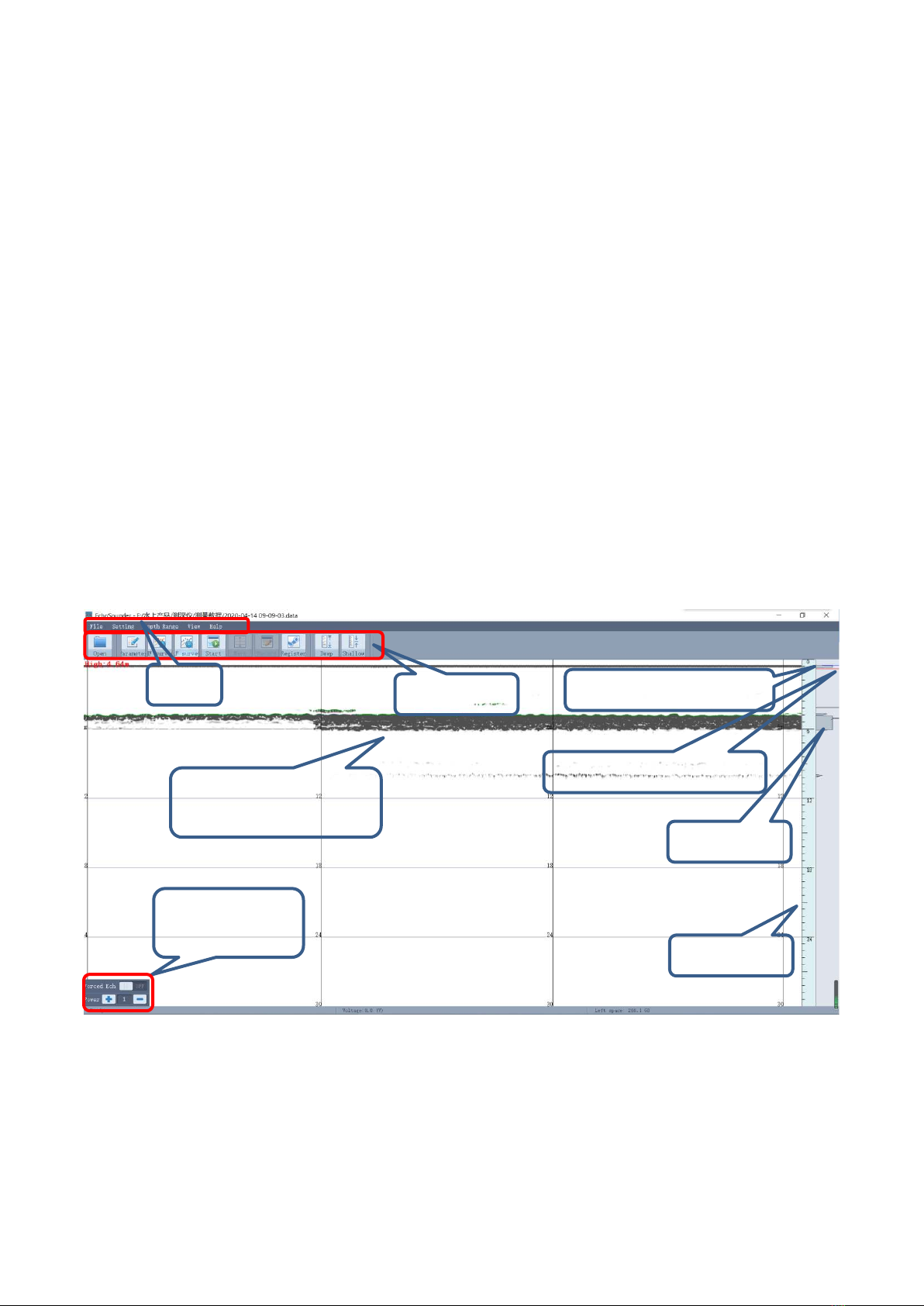
3.1.1, EchoSounder main interface ......................................................................................................... 10
3.1.2, Menu................................................................................................................................................ 12
3.1.3, Toolbar............................................................................................................................................ 23
3.2, HySurvey ..................................................................................................................................................... 25
3.2.1, Main interface................................................................................................................................. 25
3.2.2, Menu................................................................................................................................................ 26
3.2.3, Toolbar............................................................................................................................................ 73
3.2.4, Navigation info/GPS1 plot............................................................................................................. 75
3.2.5, Message window............................................................................................................................ 76
3.2.6, Depth curve window...................................................................................................................... 76
Chapter 4 Hardware installation............................................................................................................................. 77
4.1, Transducer installation................................................................................................................................ 77
4.2, GNSS receiver connection........................................................................................................................... 78
Chapter 5 Specifications .......................................................................................................................................... 79