Vers. 111422 4
Table of Contents
DECLARATION OF USE...............................................................................................................3
INTRODUCTION ...............................................................................................................................6
MODELS...............................................................................................................................................6
INSTALLATION .................................................................................................................................7
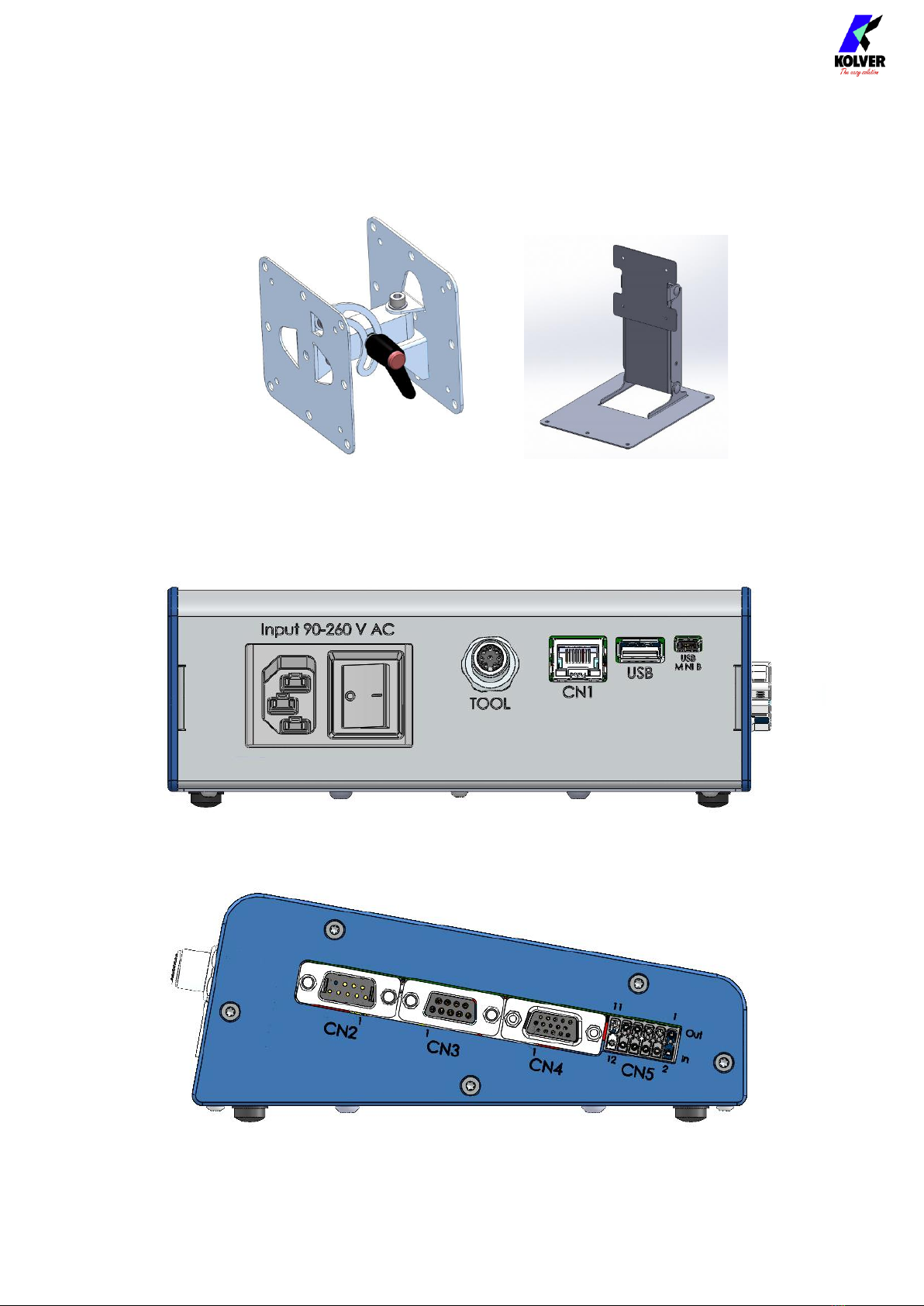
Installation of KDU-NT unit..........................................................................................................7
Connectors .......................................................................................................................................8
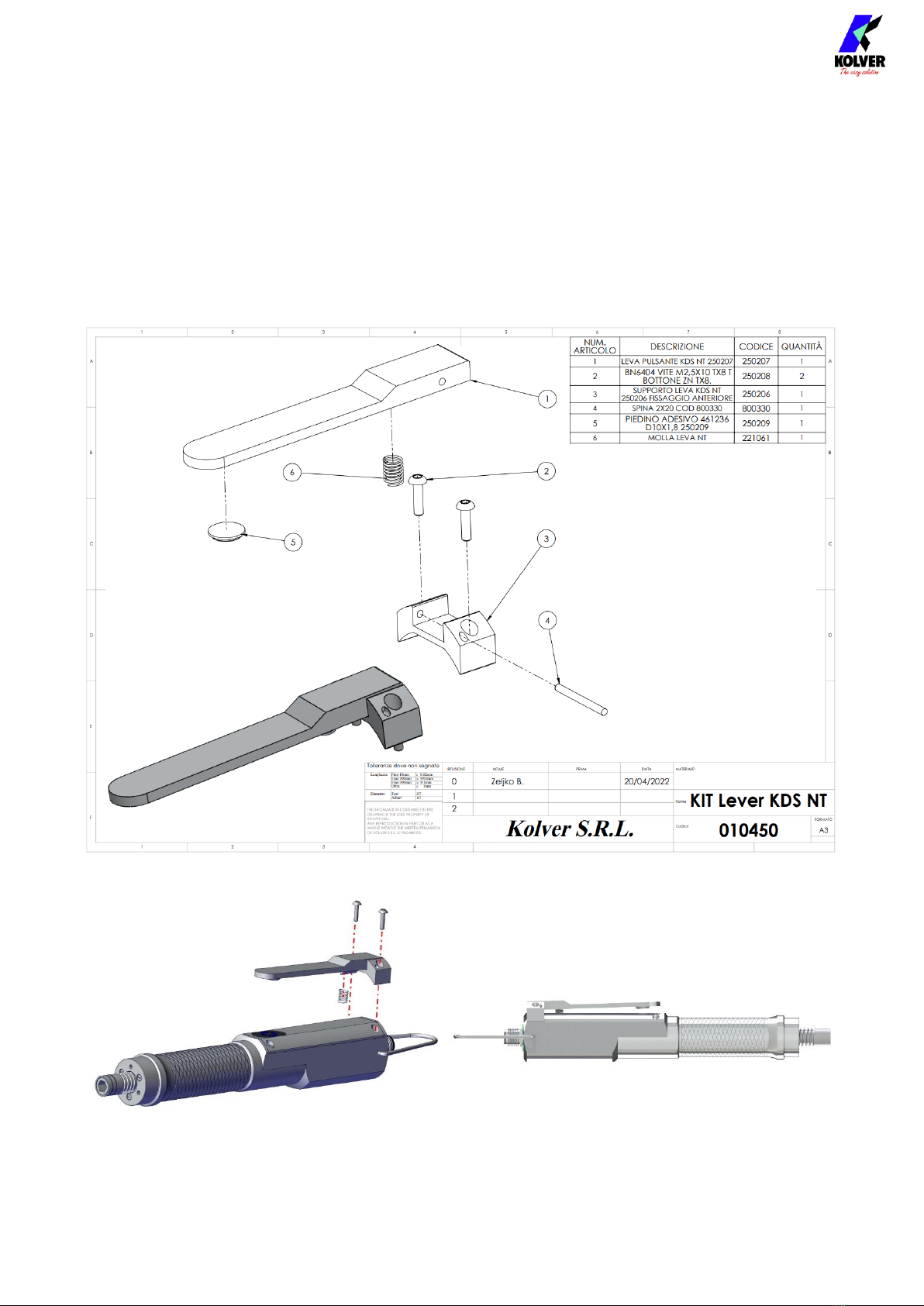
Installation of KDS screwdriver..................................................................................................10
Lever installation.......................................................................................................................10
Cable connection and part numbers ......................................................................................11
Installation of reaction arm......................................................................................................11
Installation on a fixture ............................................................................................................11
QUICK START...................................................................................................................................14
TERMINOLOGY ...............................................................................................................................17
OPERATING THE KDS SCREWDRIVER .....................................................................................19
OPERATING THE K-DUCER CONTROL UNIT.........................................................................21
Main Screen – Program Mode – navigation tree ......................................................................21
Main Screen – Program Mode.....................................................................................................22
Main Screen – Sequence Mode – navigation tree .....................................................................24
Main Screen – Sequence Mode....................................................................................................25
Torque and Angle graphing ........................................................................................................27
Visualizing the Torque and Angle charts ..............................................................................27
Interpreting the Torque and Angle charts.............................................................................28
Torque and Angle charts with Running Torque ..................................................................29
Determining the joint type...........................................................................................................30
Determining the appropriate program settings .......................................................................31
Hard/inelastic joints..................................................................................................................31
Soft/elastic joints........................................................................................................................31
Screwdriving Phases.....................................................................................................................32
Retrieving and storing the screwdriving results......................................................................33
Connecting a barcode scanner ....................................................................................................35
Connecting a bit-tray or switchbox (CBS880, SWBX88)..........................................................35
CONFIGURING THE K-DUCER ...................................................................................................37