INSTALLATION MANUAL
20221594 / B iii
Contents
1INTRODUCTION ................................................................5
2INSTALLATION..................................................................5
2.1 Mechanical installation ........................................................5
2.2 Cabling .............................................................................5
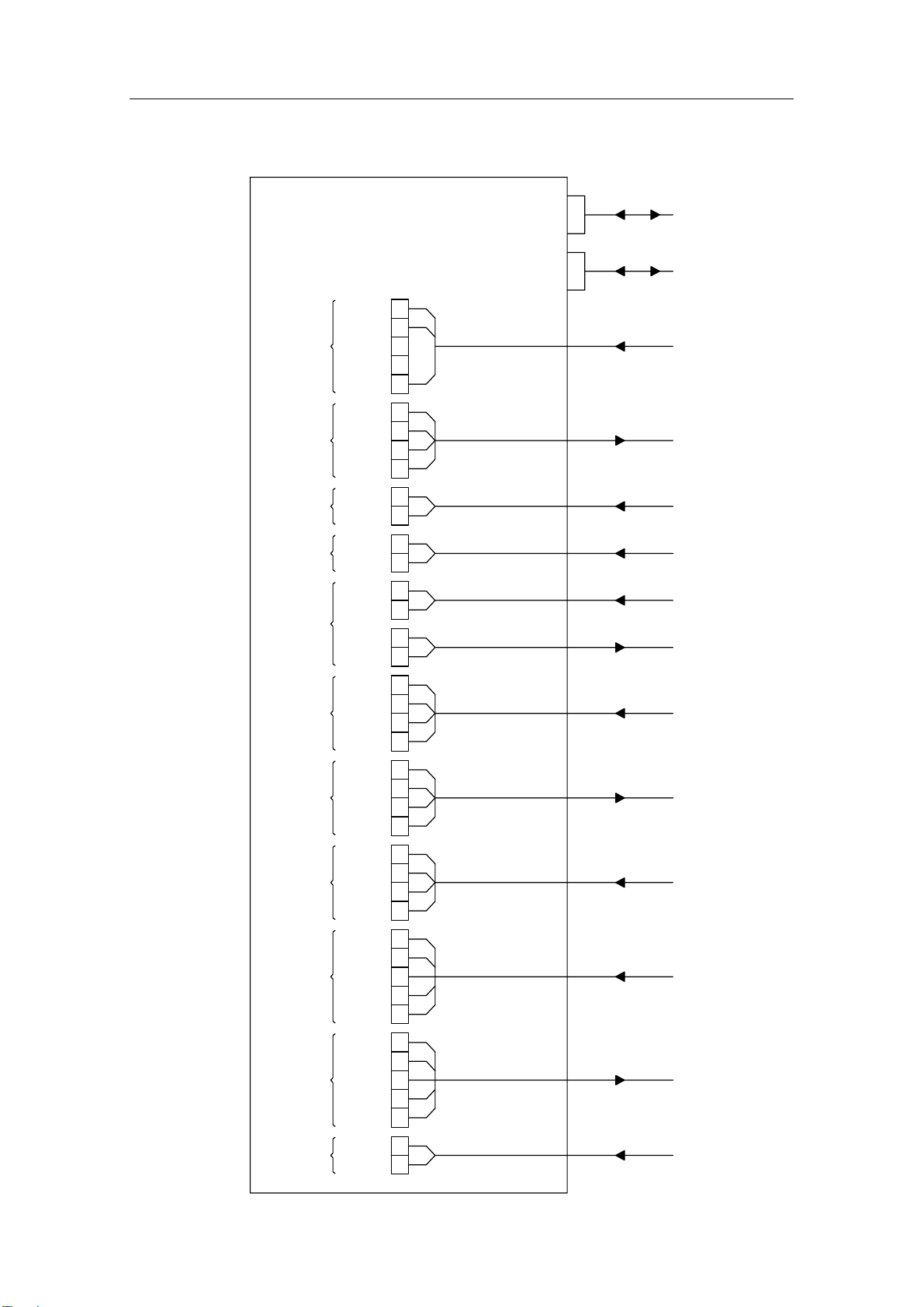
GI51 Block diagram .......................................................6
2.3 Dip switch settings..............................................................7
2.4 Interface setup procedure....................................................8
2.5 Offset adjustment...............................................................8
2.6 Calibration.........................................................................9
2.7 Initial heading and heading change test ............................... 10
2.8 S9 Steering lever.............................................................. 11
3GI51 PCB ........................................................................12
3.1 Component location .......................................................... 12
3.2 Terminal description ......................................................... 13
TB1, Power................................................................. 13
TB2, Sin/Cos Out ........................................................ 13
TB3, Synchro In .......................................................... 13
TB4, NFU ................................................................... 13
TB5, Step Out............................................................. 13
TB6, Step In............................................................... 14
TB7 and TB8, NMEA..................................................... 14
TB9, RGC proprietary................................................... 14
TB10, LOG ................................................................. 14
TB11, Radar ............................................................... 14
TB12, Selector ............................................................ 15
4PENDULUM FUNCTION KEY (OPTION).............................16
5TROUBLE SHOOTING .......................................................17
5.1 LED indicators.................................................................. 18
6SPARE PARTS ..................................................................19
7TECHNICAL SPECIFICATIONS .........................................20
7.1 Hardware ........................................................................ 20
7.2 Supply ............................................................................ 20