2 Vermeidung von Sachschäden Lenord + BauerVeränderungen und Umbauten
6GEL 248
Deutsch
2 Hinweise zur Vermeidung von Sachschäden und Fehlfunktionen
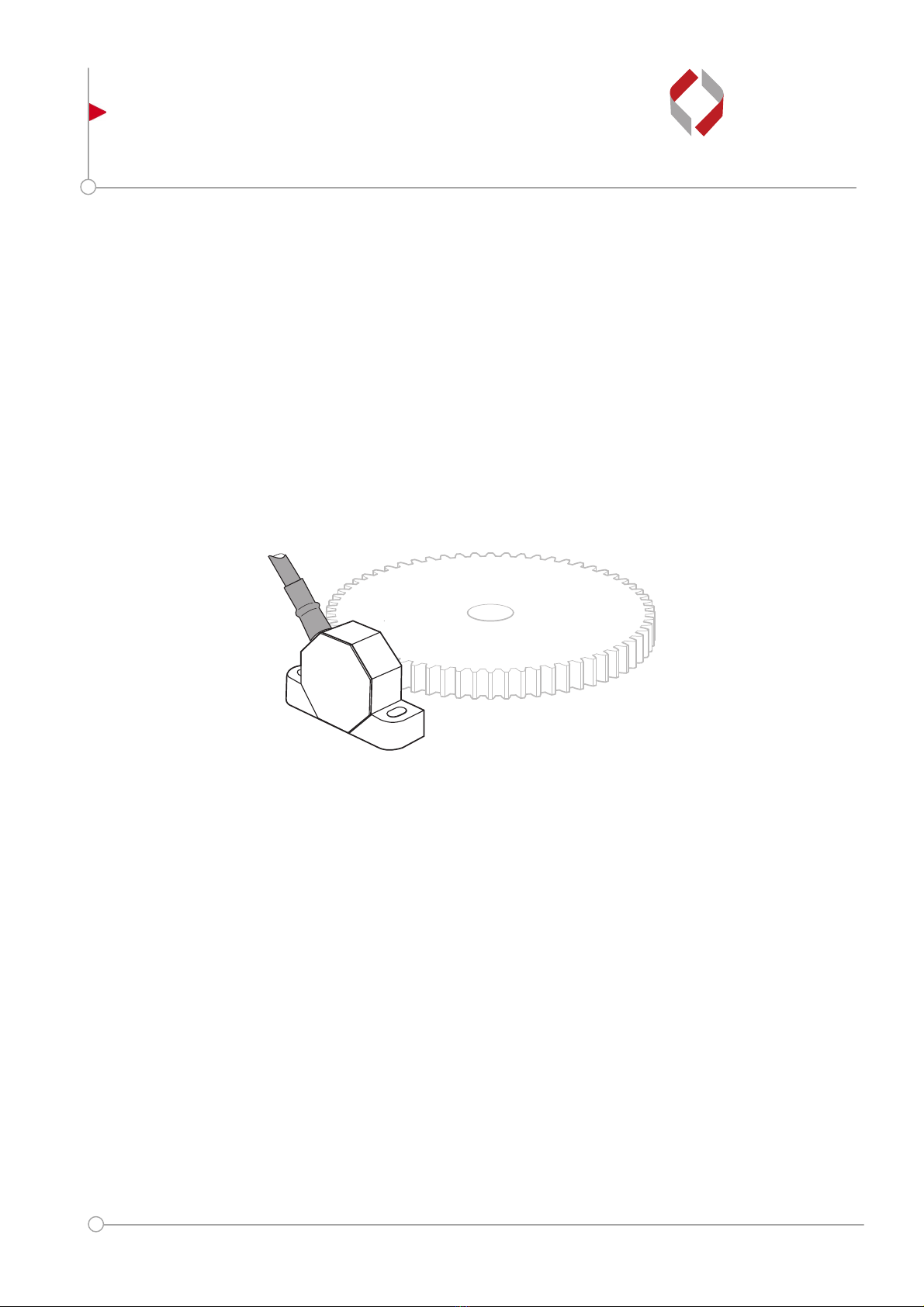
Der Drehzahlsensor ist äußerst robust ausgeführt. Dennoch kann er durch unzulässige
mechanische Belastung beschädigt werden, denn das aktive, magnetische Sensor-
element liegt dicht unter der Messfläche. Mechanische Beschädigung kann zum Ausfall
des Messsystems führen.
2.1 Veränderungen und Umbauten
Unsachgemäße Veränderungen oder Umbauten können das Produkt beschädigen.
Nehmen Sie keine Veränderungen und Umbauten am Produkt vor, mit
Ausnahme von in dieser Betriebsanleitung beschriebenen Tätigkeiten.
2.2 Messfläche
Der Drehzahlsensor ist an seiner Messfläche stark magnetisch. Bei Annäherung an
metallische Gegenstände kann es dabei schnell zu einer Berührung kommen. Bei Be-
rührung beispielsweise mit dem Messzahnrad oder aufgrund von anderen mechani-
schen Stößen kann die Messfläche beschädigt werden.
Achten Sie darauf, dass die Messfläche nicht mit anderen Gegenstän-
den in Berührung kommt.
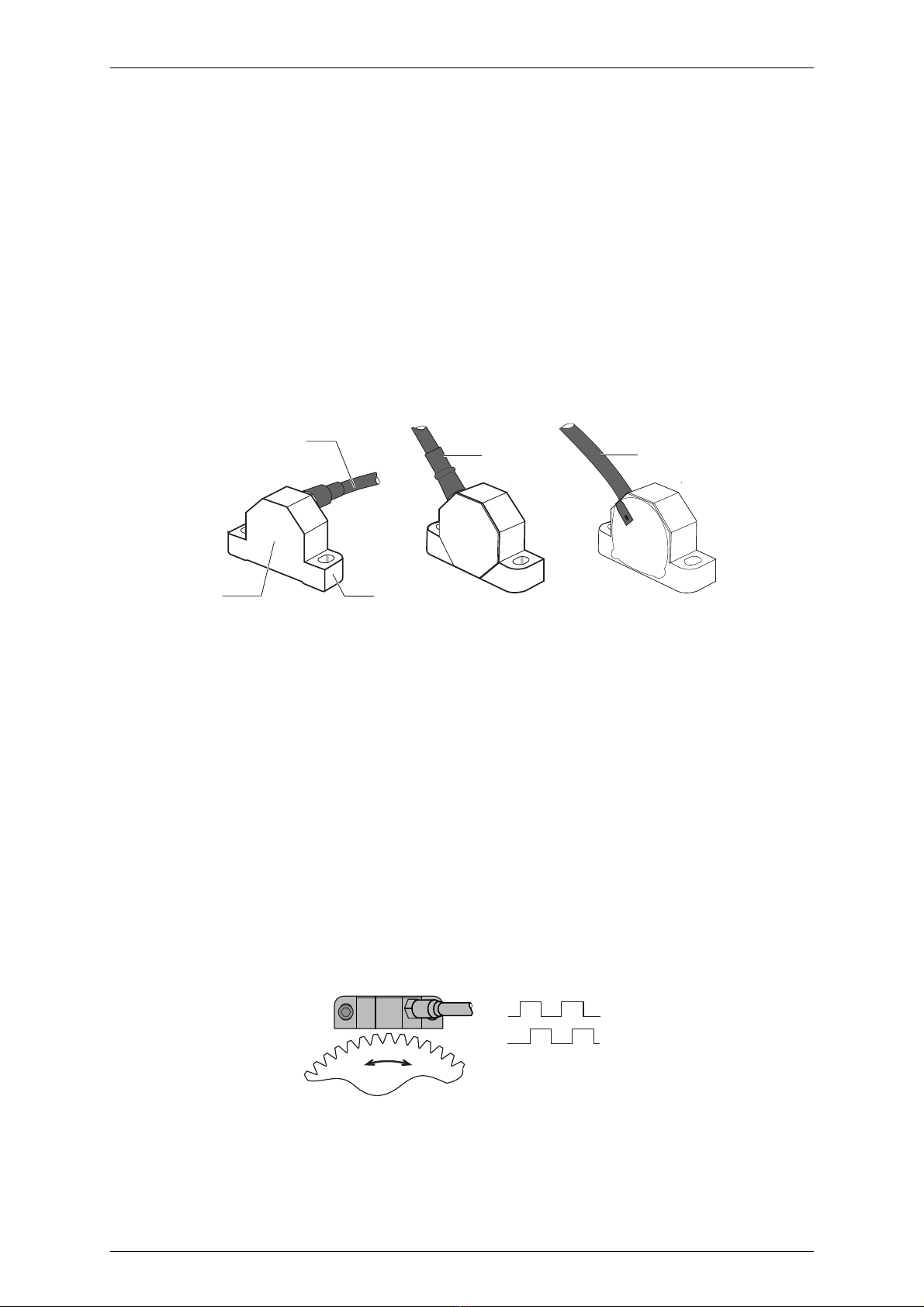
2.3 Luftspalt zwischen Messfläche und Messzahnrad
Ein zu großer Luftspalt, d. h. ein zu großer Abstand zwischen Messfläche und Mess-
zahnrad, kann zum Verlust des Messsignals führen.
Bei einem zu kleinen Luftspalt kann durch einen Höhenschlag das Messzahnrad die
Messfläche berühren.
Bei großen Temperaturschwankungen und unterschiedlichen thermischen Ausdeh-
nungskoeffizienten von Zahnrad und Trägerplatte (Aufnahmevorrichtung) des Sensors
können kritische Luftspaltänderungen auftreten:
●Ein vergrößerter Luftspalt wirkt sich negativ auf die Messgenauigkeit aus (evtl. zu
kleine Signalamplituden).
●Ein verkleinerter Luftspalt führt zu Übersteuerungen und damit zu möglichen Im-
pulsverlusten.
Stellen Sie sicher, dass der Luftspalt im zulässigen Bereich liegt (siehe Tabelle
→Seite 12).
2.4 Unsymmetrie
Sitzt das Zahnrad nicht symmetrisch zur Messfläche, können Messfehler auftreten.
Richten Sie den Drehzahlsensor symmetrisch zum Messzahnrad aus: Symmetri-
elinien müssen übereinstimmen.