Table of Content
1SAFETY PRECAUTIONS ..........................................................................................................................................3
2SPECIFICATIONS .....................................................................................................................................................4
2.1 Specification of Components.............................................................................................................................4
2.2 Standard System Configurations.......................................................................................................................6
2.3 General Environmental Conditions....................................................................................................................7
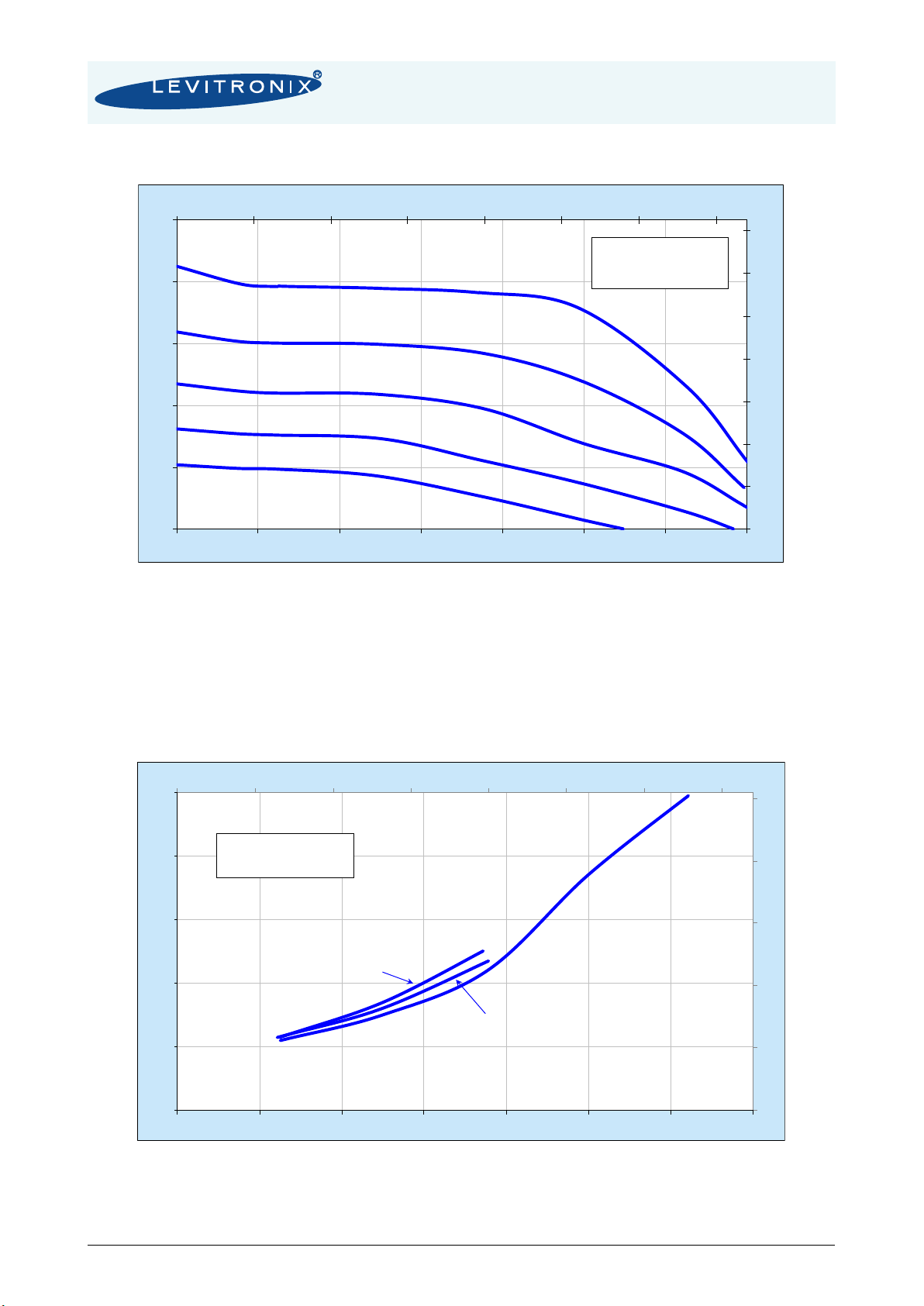
2.4 Pressure-Flow Curves.......................................................................................................................................8
2.5 NPSHr Curves...................................................................................................................................................8
2.6 Maximum Static Pressure for Pump Heads.......................................................................................................9
2.7 Basic Dimensions of Main Components..........................................................................................................10
3ENGINEERING INFORMATION..............................................................................................................................12
3.1 Material and Sealing Concept..........................................................................................................................12
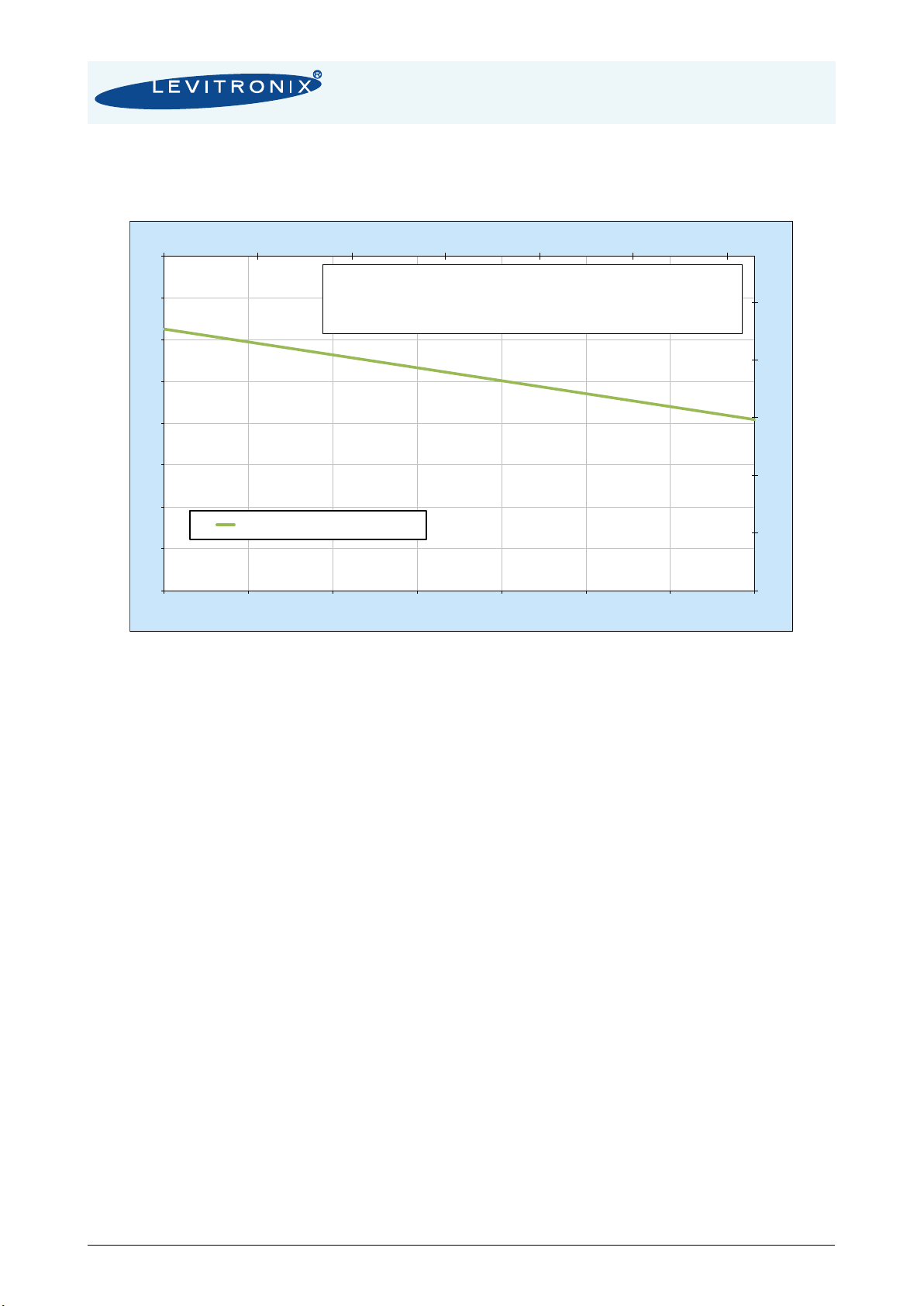
3.2 AC Supply and Power Consumption................................................................................................................13
3.3 Temperature Monitoring ..................................................................................................................................14
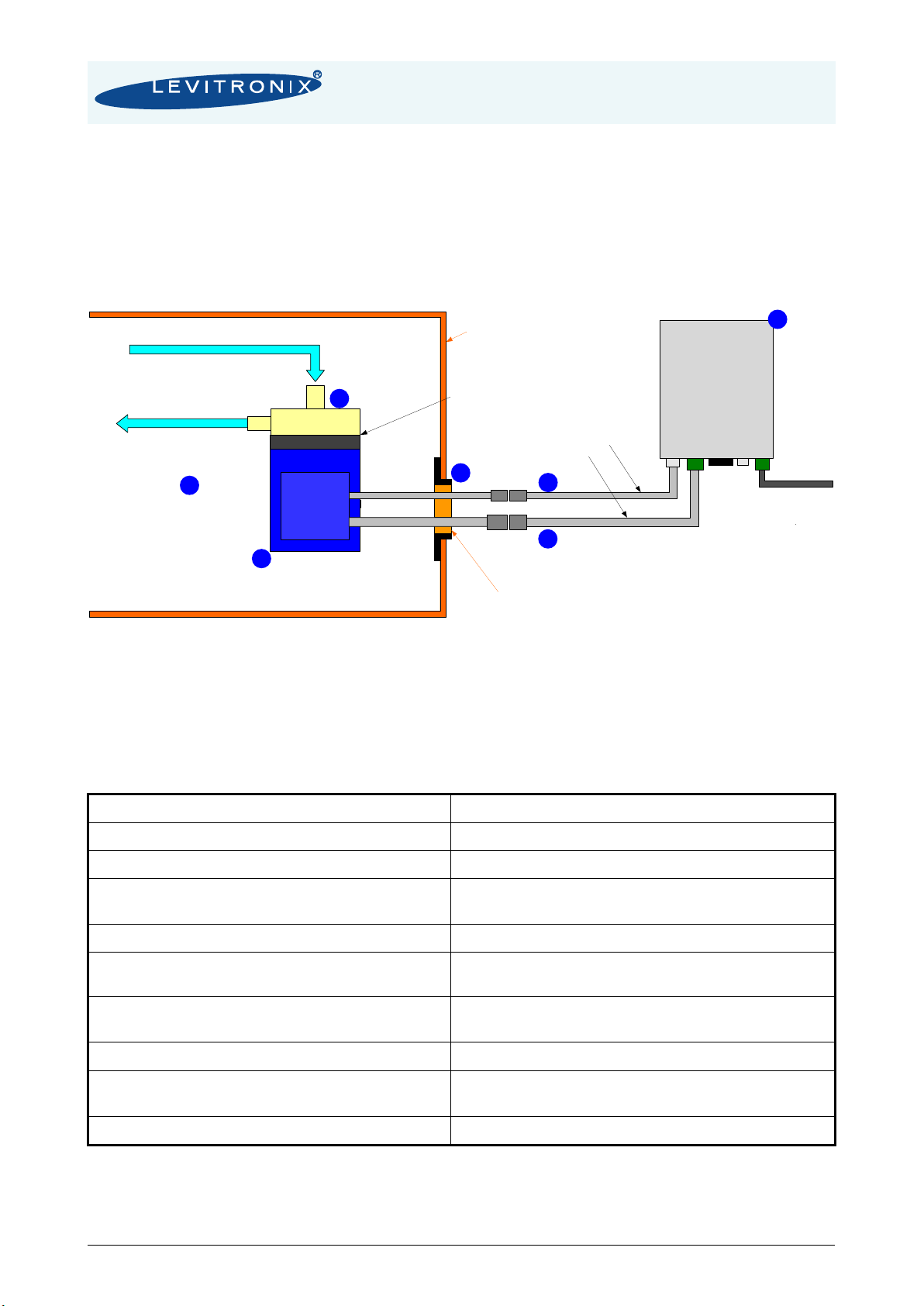
3.4 Thermal Management......................................................................................................................................15
3.5 Hydraulic Circuit Design ..................................................................................................................................19
4INSTALLATION.......................................................................................................................................................20
4.1 Electrical Installation of Controller....................................................................................................................20
4.2 Mechanical Installation of the Motor ................................................................................................................26
4.3 Mechanical Installation of the Controller..........................................................................................................28
4.4 Mechanical Installation of Adaptor/Extension Cables......................................................................................29
4.5 System Operation with LPC-2000.1 (Stand-Alone Version) ............................................................................30
4.6 System Operation with Controller LPC-2000.2 (PLC version) .........................................................................33
4.7 System Operation for ATEX / IECEx Applications...........................................................................................35
5INSTRUCTIONS FOR USE OF PUMP HEAD .........................................................................................................36
5.1 Description and Preparation ............................................................................................................................36
5.2 General Warnings and Cautions......................................................................................................................36
5.3 Mounting of Pump Head..................................................................................................................................37
5.4 Removal of Pump Head...................................................................................................................................37
5.5 Assembly into Circuit.......................................................................................................................................37
6TROUBLESHOOTING.............................................................................................................................................38
6.1 Troubleshooting for Operation with Controller LPC-2000.1.............................................................................38
6.2 Troubleshooting for Operation with Controller LPC-2000.2.............................................................................38
6.3 Troubleshooting with Levitronix®Service Software..........................................................................................38
7TECHNICAL SUPPORT ..........................................................................................................................................38
8APPENDIX...............................................................................................................................................................39
8.1 Regulatory Status............................................................................................................................................39
8.2 Symbols and Signal Words..............................................................................................................................42