Table of Contents
1. PRODUCT PROFILE .................................................................................................. 1
1.1 OVERVIEW ................................................................................................................ 1
1.2 MECHANISM ............................................................................................................. 1
1.3 SPECIFICATIONS ........................................................................................................ 1
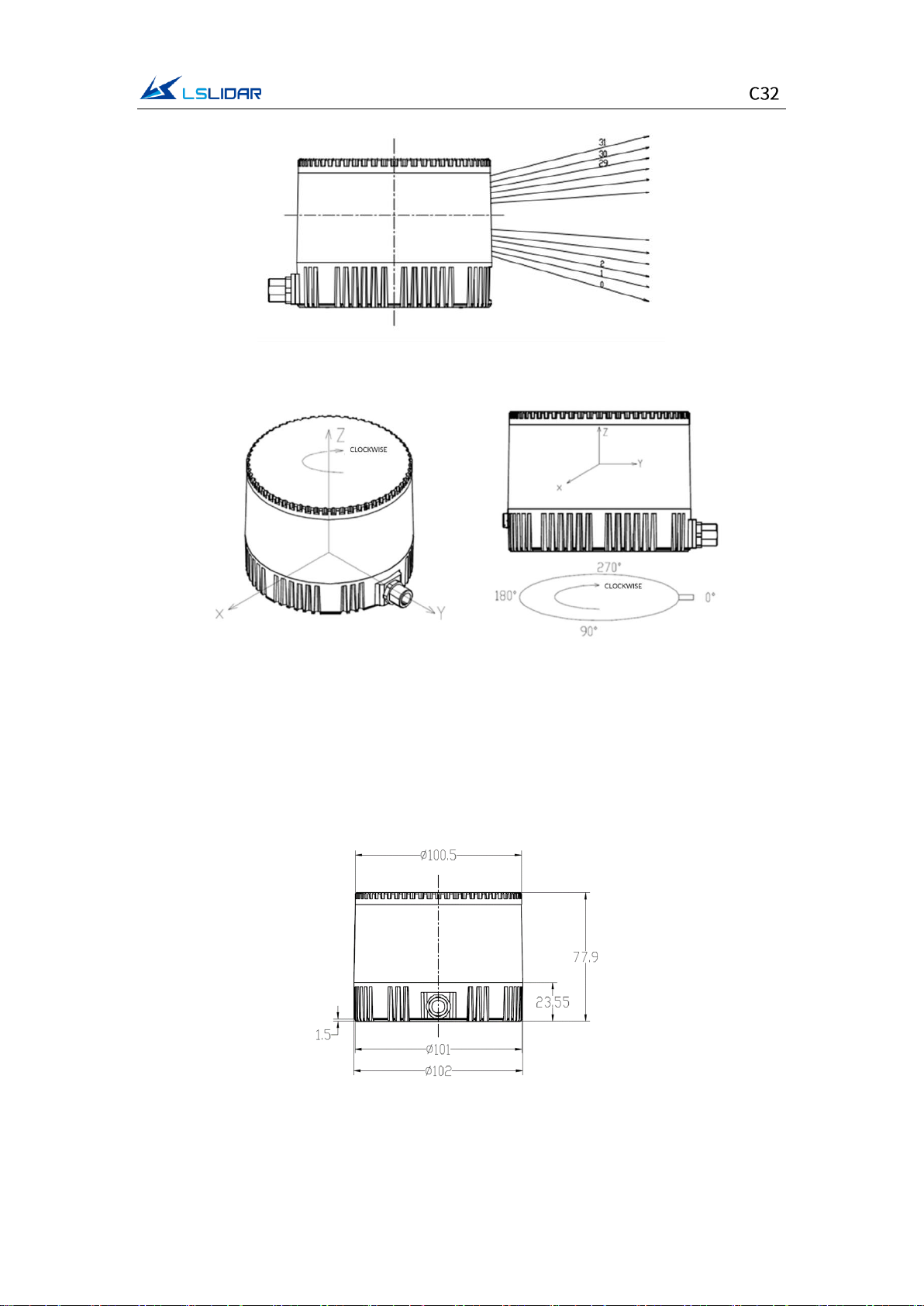
1.4 MECHANICAL STRUCTURE........................................................................................ 2
1.5 LIGHT SPOT............................................................................................................... 4
2. ELECTRICAL INTERFACE......................................................................................... 5
2.1 POWER SUPPLY......................................................................................................... 5
2.2 CONNECTORS ........................................................................................................... 6
3. GET READY ...............................................................................................................10
3.1 LIDAR CONNECTION............................................................................................... 10
3.2 SOFTWARE PREPARATION ...................................................................................... 10
4. USAGE GUIDE .......................................................................................................... 11
4.1 OPERATION UNDER WINDOWS OS ......................................................................12
4.1.1 Lidar Configuration...................................................................................... 12
4.1.2 Windows Client Interface .......................................................................... 13
4.1.3 Operation Procedure ..................................................................................15
4.1.4 Point Cloud Data Parsing ...........................................................................15
4.1.5 Parameter Config Example of Lidar Network Communication Mode
...................................................................................................................................16
4.1.6 Note................................................................................................................18
4.2 ROS DRIVER OPERATION UNDER LINUX OS ........................................................21
4.2.1 Hardware Connection and Test ................................................................21
4.2.2 Software Operation Example ....................................................................22
5. COMMUNICATION PROTOCOL .........................................................................23
5.1 MSOP PROTOCOL ................................................................................................. 24
5.1.1 Format............................................................................................................24
5.1.2 Data Package Parameter Description...................................................... 25
5.2 DIFOP PROTOCOL.................................................................................................27