NM500 Manual 3
CONTENTS
1Overview................................................................................................................................................................4
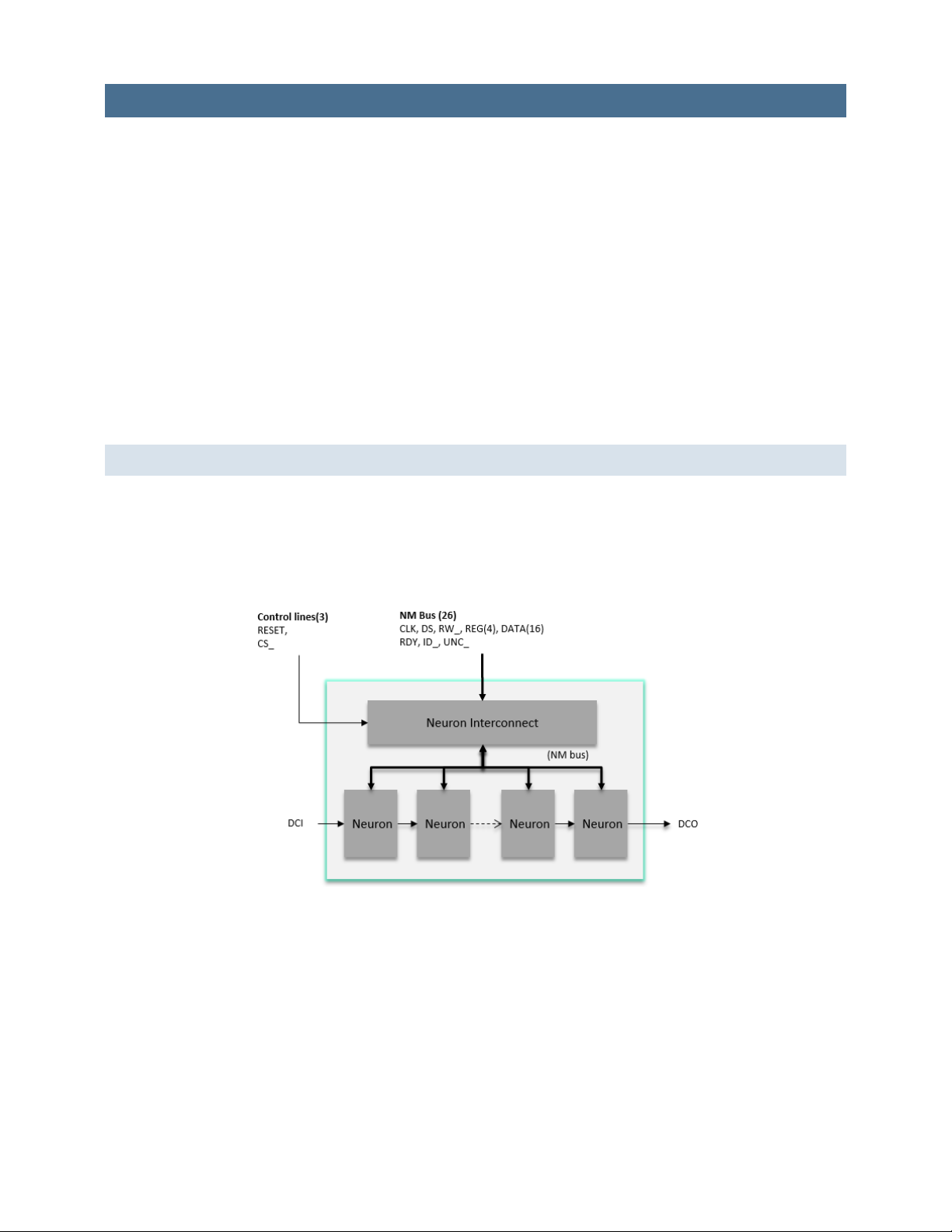
1.1 Architecture .................................................................................................................................................4
1.2 The basic neuron entity................................................................................................................................5
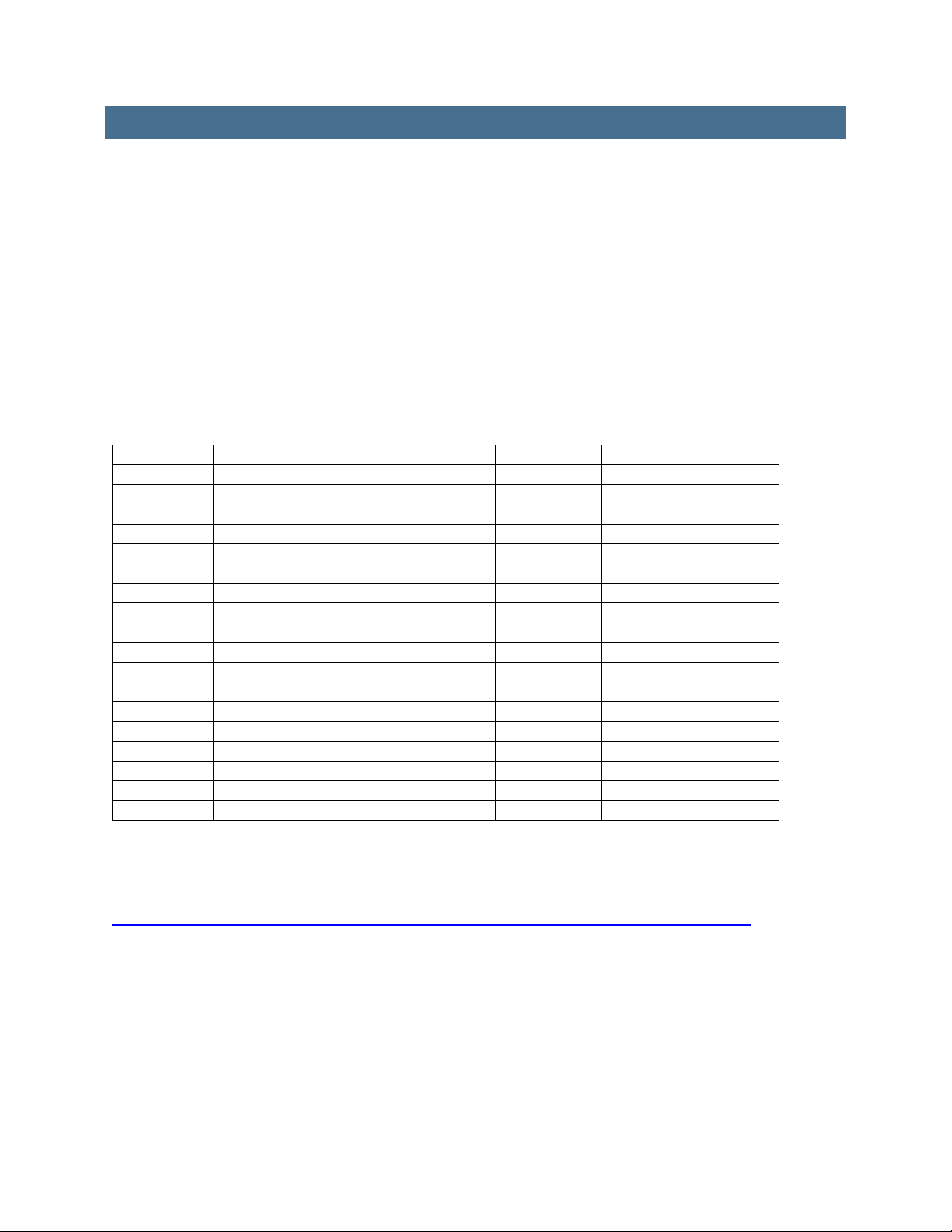
2The control registers..............................................................................................................................................6
2.1 Neuron registers in detail.............................................................................................................................7
2.2 Registers Access Latency............................................................................................................................11
2.3 Typical latencies per operation ..................................................................................................................12
3NeuroMem bus and control lines........................................................................................................................13
3.1 Clocks, power-up and reset........................................................................................................................14
3.1.1 G_Reset, global reset .............................................................................................................................14
3.1.2 G_CLK, system clock ..............................................................................................................................14
3.1.3 CS_, power saving control line...............................................................................................................14
3.1.4 DCI..........................................................................................................................................................14
3.1.5 DCO ........................................................................................................................................................14
3.2 NeuroMem bus ..........................................................................................................................................15
3.2.1 DS...........................................................................................................................................................15
3.2.2 RW_ .......................................................................................................................................................15
3.2.3 REG[3:0] .................................................................................................................................................15
3.2.4 DATA[15:0].............................................................................................................................................16
3.2.5 RDY.........................................................................................................................................................16
3.2.6 ID_..........................................................................................................................................................16
3.2.7 UNC_ ......................................................................................................................................................16
4Typical Timings Constraints .................................................................................................................................17
4.1 Timings .......................................................................................................................................................17
4.2 Learn a vector.............................................................................................................................................18
4.3 Recognize a vector .....................................................................................................................................19
5Interconnecting chips ..........................................................................................................................................20
5.1 Counting the neurons in a chain of unknown length.................................................................................20
5.2 Verifying the proper interconnectivity of the entire chain ........................................................................20
5.3 If a chain has more than 65535 neurons....................................................................................................21
5.4 Single or multiple chains of neurons..........................................................................................................21
6Pinout ..................................................................................................................................................................22
7Mechanical specifications....................................................................................................................................25
8Electrical Specifications .......................................................................................................................................26
8.1 Recommended Operating Conditions........................................................................................................26
8.2 DC Electrical Charateristics.........................................................................................................................26
9Power Consumption ............................................................................................................................................27
9.1 Peak Power.................................................................................................................................................27
9.2 Intrinsic Power ...........................................................................................................................................27
9.3 UPower saving tips ......................................................................................................................................27
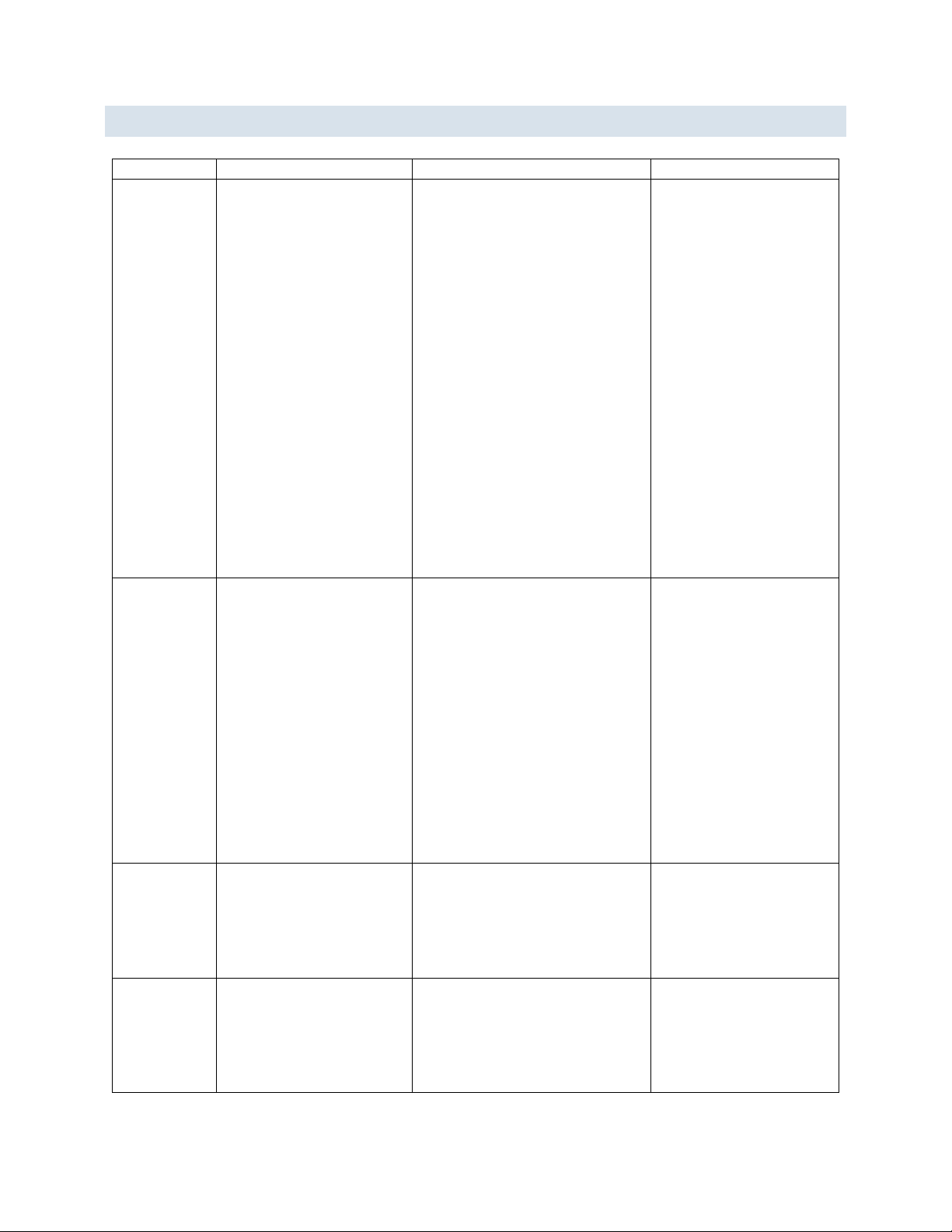
10 FAQ ......................................................................................................................................................................28
10.1 Hardware questions ...................................................................................................................................28
10.2 Functional questions ..................................................................................................................................28
10.3 What is the difference between CM1K and NM500 ..................................................................................29