2 / 24
pmg4111a0600p_01
TABLE OF CONTENTS
1. GENERAL DESCRIPTION .................................................................................................................... 3
2. ORDER CODE ....................................................................................................................................... 3
3. TECHNICAL DATA................................................................................................................................ 4
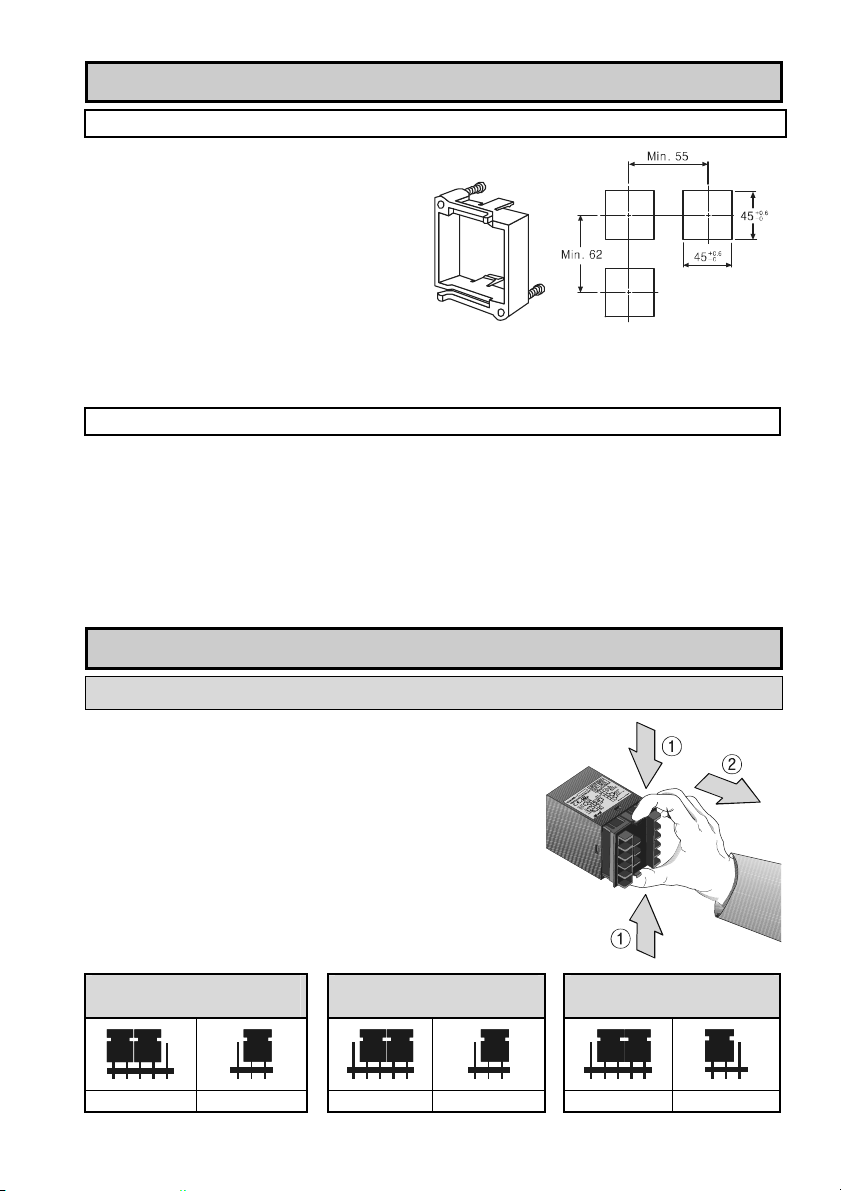
3.1 DIMENSIONS...................................................................................................................................... 4
3.2 ACCESSORIES ................................................................................................................................... 4
4. MOUNTING............................................................................................................................................ 5
5. WIRING .................................................................................................................................................. 5
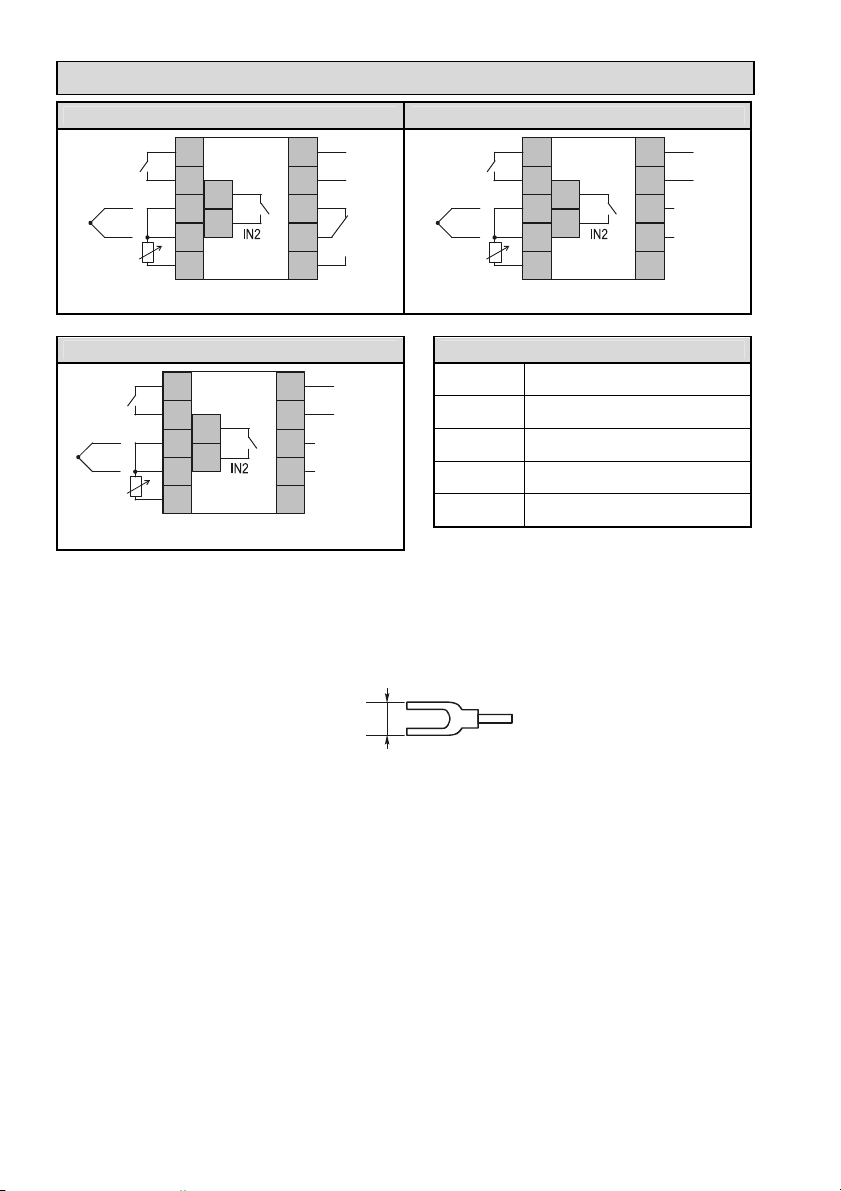
5.1 INPUT SELECTION............................................................................................................................... 5
5.2 WIRING POWER SUPPLY,INPUT/OUTPUT ............................................................................................ 6
6. CONTROL OUTPUTS ........................................................................................................................... 7
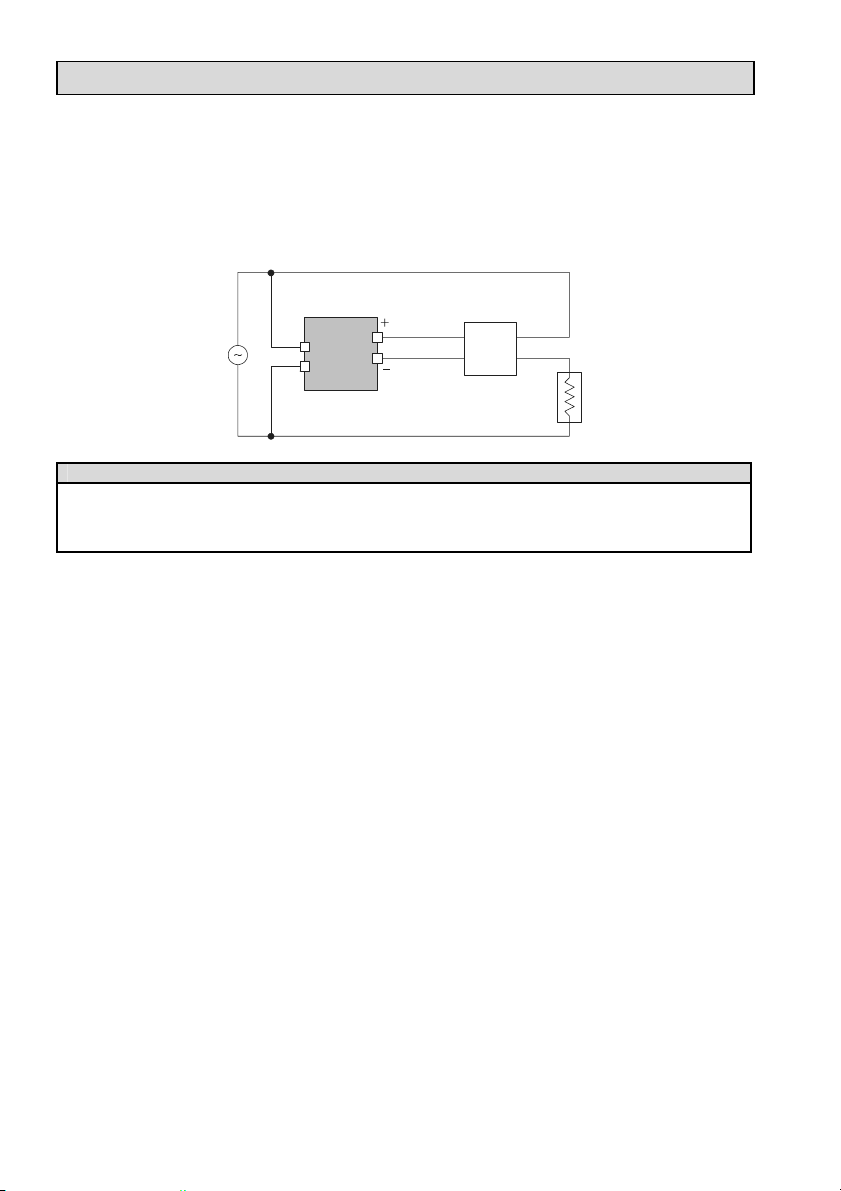
6.1 RELAY OUTPUT.................................................................................................................................. 7
6.2 SOLID STATE RELAY (SSR) DRIVER OUTPUT........................................................................................ 8
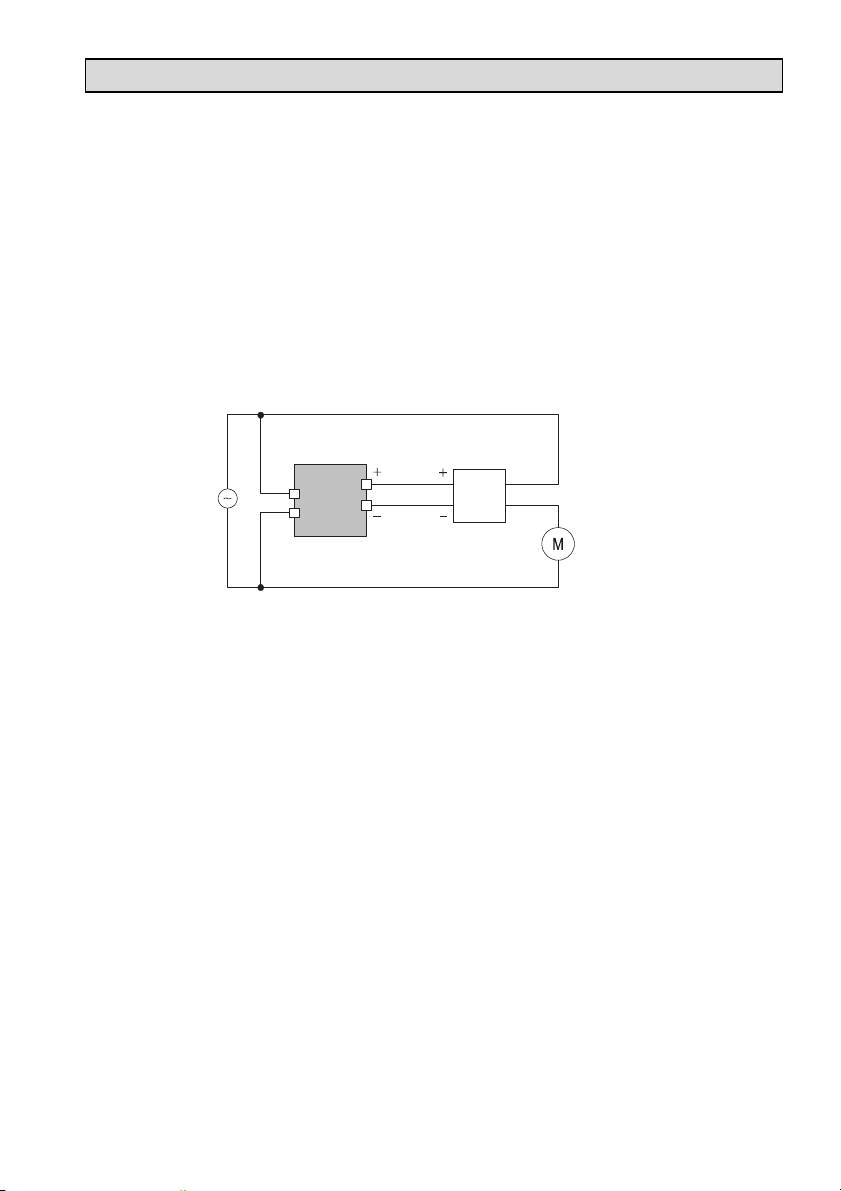
6.3 ANALOGUE (4-20 mA) OUTPUT........................................................................................................... 9
7. SETTINGS, PROGRAMMING ............................................................................................................. 10
7.1 FRONT PANEL,KEYPAD,DISPLAY...................................................................................................... 10
7.2 BASIC OPERATION............................................................................................................................ 11
7.3 ERROR MESSAGES........................................................................................................................... 11
7.4 SET VALUE (SV) ............................................................................................................................. 11
7.5 CONFIGURATION MODE.................................................................................................................... 12
7.5.1 Mode Settings...................................................................................................................... 12
7.5.2 Control Parameters ............................................................................................................. 13
8. CONTROL ALGORITHMS .................................................................................................................. 14
8.1 ON/OFF CONTROL.......................................................................................................................... 14
8.2 HEATING/COOLING (FILLING /EMPTYING)CONTROL........................................................................... 14
8.3 PROPORTIONAL (P) CONTROL ........................................................................................................... 15
8.4 PID CONTROL ................................................................................................................................. 15
9. IN- AND OUTPUT MODE SETTINGS .................................................................................................16
9.1 SELECT THE INPUT MODE ................................................................................................................. 16
9.1.1 Analogue input..................................................................................................................... 17
9.2 ALARM RELAY OUTPUT..................................................................................................................... 18
9.3 LOOP BREAK ALARM (LBA).............................................................................................................. 19
9.4 SENSOR BREAK ALARM (SBA) ......................................................................................................... 20
9.5 AUTOTUNING (AT) OPERATION.......................................................................................................... 20
9.6 DUAL PID CONTROL FUNCTION......................................................................................................... 21
9.7 RAMP FUNCTION ............................................................................................................................ 22
10. SETTING THE CONTROL PARAMETERS ...................................................................................... 23
10.1 SV-2 FUNCTION (INTERNAL SET VALUE).......................................................................................... 23
10.2 IN-B FUNCTION (INPUT CORRECTION) .............................................................................................. 23
11. FACTORY DEFAULT SETTINGS ..................................................................................................... 24
12. MAINTENANCE, REPAIR ................................................................................................................. 24
13. STORAGE CONDITIONS.................................................................................................................. 24
14. WARRANTY ...................................................................................................................................... 24