TABLE OF CONTENTS
1SCOPE ............................................................................................................... 5
2DESIGN OVERVIEW.......................................................................................... 6
2.1 Physical Interfaces.................................................................................................................................... 6
2.1.1 Power, Trigger & Communications - 9 pin Micro-D socket (Glenair MDM-9SBSP)......................... 6
2.1.2 Video Output - SMA ........................................................................................................................ 6
2.1.3 Iris Control - 4 pin socket................................................................................................................. 6
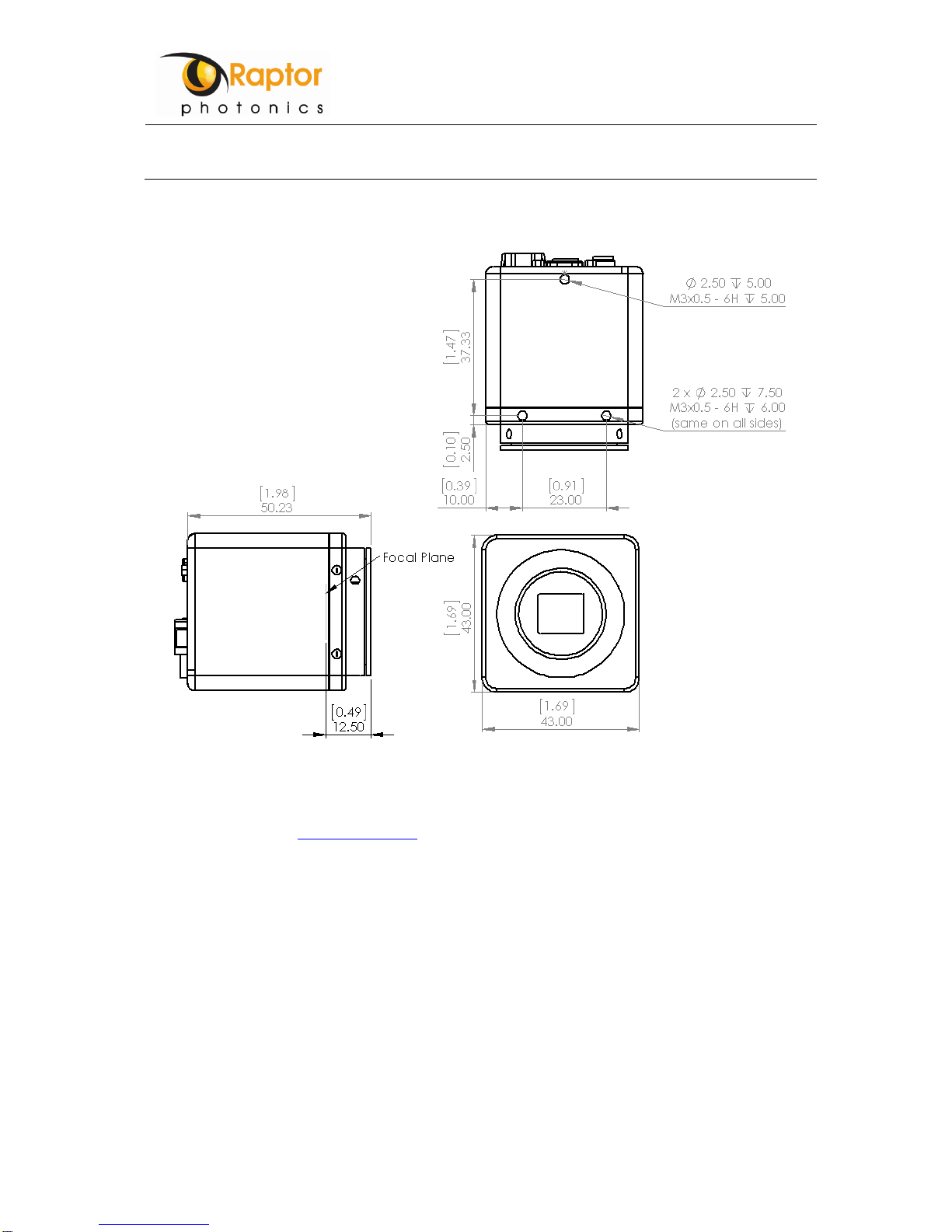
2.2 Mechanical Profile .................................................................................................................................... 7
3DESIGN DETAILS.............................................................................................. 8
3.1 Electrical Design....................................................................................................................................... 8
3.1.1 Power Input..................................................................................................................................... 8
3.1.2 Communications Interface............................................................................................................... 8
3.1.3 Trigger Output................................................................................................................................. 8
3.1.4 Analogue Video out......................................................................................................................... 8
3.1.5 Iris Control....................................................................................................................................... 9
3.2 Functionality.............................................................................................................................................. 9
3.2.1 Automatic Light Control (ALC)......................................................................................................... 9
4SERIAL COMMUNICATION (RS485) ...............................................................10
4.1 Overview..................................................................................................................................................10
4.2 ETX/Error Codes .....................................................................................................................................11
4.3 Set Commands........................................................................................................................................12
4.4 Query Commands....................................................................................................................................13
4.5 Examples.................................................................................................................................................14
4.5.1 Get System Status .........................................................................................................................14
4.5.2 Get Micro version...........................................................................................................................14
4.5.3 Read internal temperature..............................................................................................................14
4.5.4 Command acknowledge.................................................................................................................14
Figure 1: Mechanical profile drawing –SolidWorks model..................................................................................... 5
Figure 2: 9 Pin MDM connector............................................................................................................................... 6
Figure 3: Mechanical external dimensions.............................................................................................................. 7
Figure 4: Trigger Output HK829-AC........................................................................................................................ 8