3R110 Plus User Manual
szruitech.com
Contents
1. Product overview......................................................................................................................................... 1
1.1 Characteristic......................................................................................................................................... 1
2. Application environment and installation..................................................................................................1
2.1 Environmental requirement..................................................................................................................1
2.2 Driver installation dimensions..............................................................................................................2
3. Driver port and connection......................................................................................................................... 2
3.1 Power supply and motor port function description........................................................................... 2
3.2 Control signal connection.....................................................................................................................3
3.2.1 PUL, DIR port(IN1,IN2)...............................................................................................................3
3.2.2 ENA(IN3)port............................................................................................................................. 4
3.2.3 ALM(OUT1)port ........................................................................................................................4
3.3 USB port .................................................................................................................................................4
4. The setting of DIP switches and operating parameters.........................................................................5
4.1 The setting of current............................................................................................................................ 5
4.2 Standby current......................................................................................................................................5
4.3 The setting of pulse per revolution......................................................................................................5
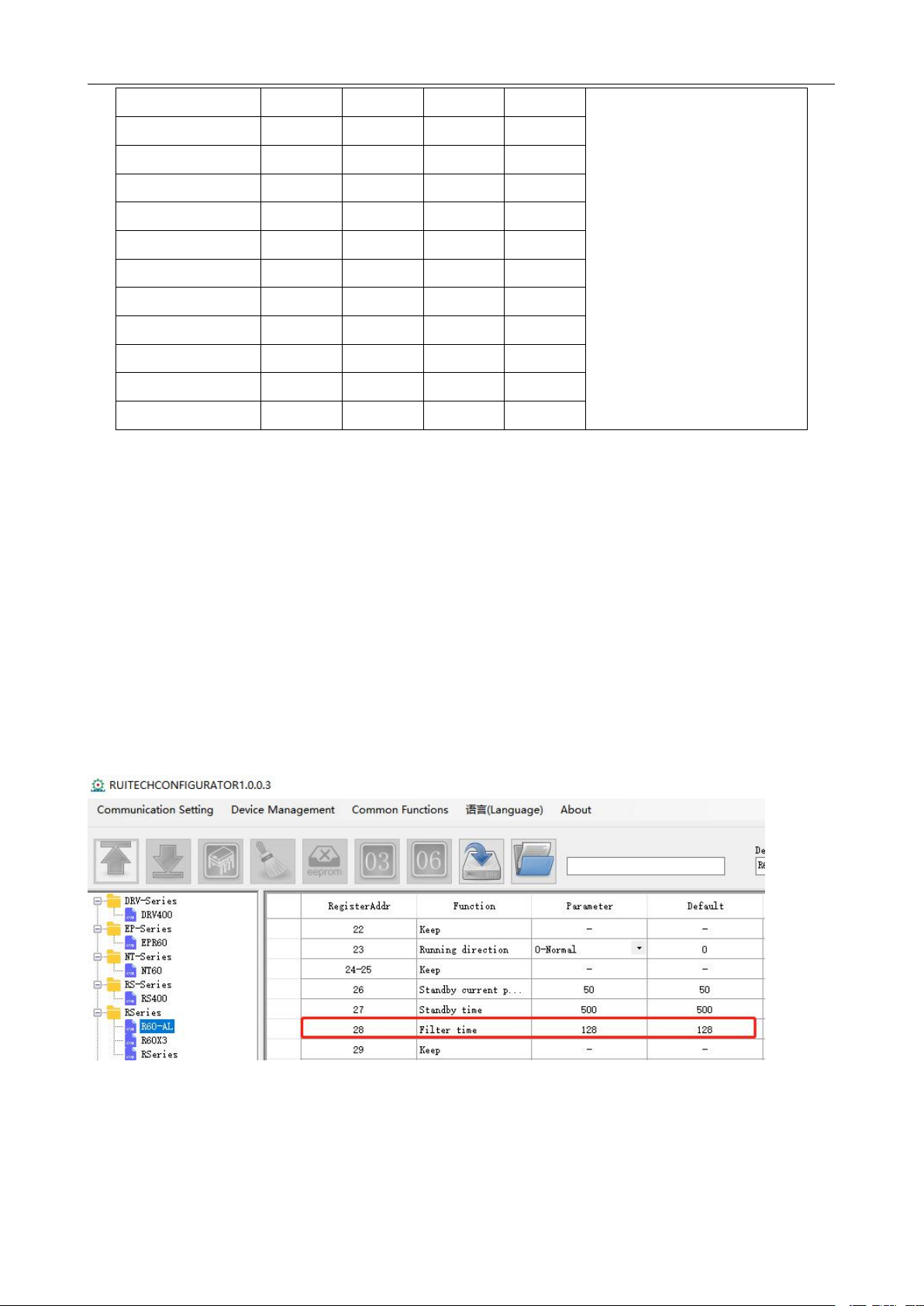
4.4 Pulse command filtering....................................................................................................................... 6
4.5 The setting of pulse mode....................................................................................................................7
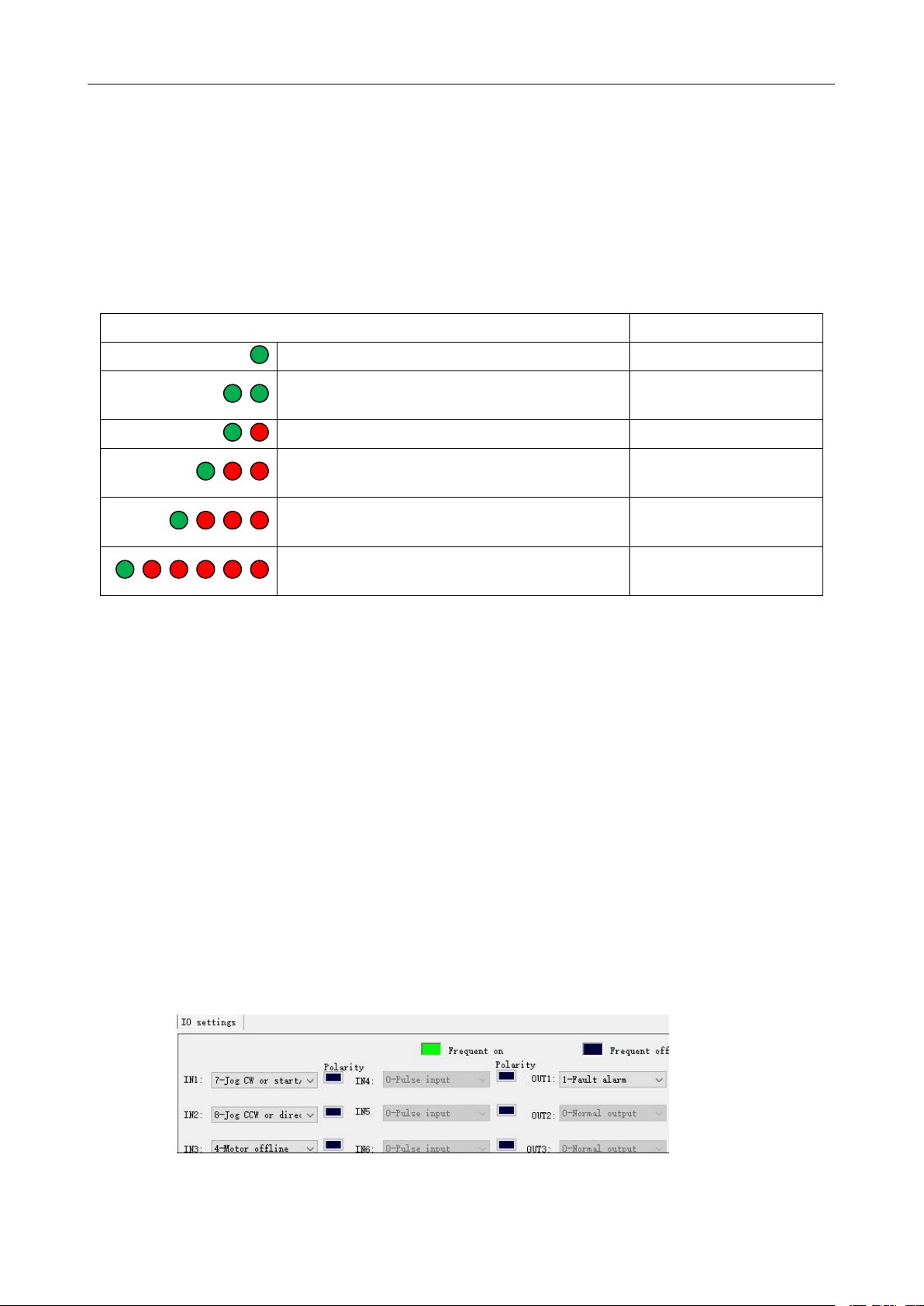
5. Driver working status LED indication........................................................................................................7
6. Phase loss alarm......................................................................................................................................... 7
7. Internal motion control function................................................................................................................. 7
7.1 Communication control mode..............................................................................................................8
7.1.1 Point control mode......................................................................................................................... 8
7.1.2 Jog control mode............................................................................................................................9
7.2 IO Control: Start and Stop + Direction............................................................................................. 10
7.3 IO Control: Forward + Reverse......................................................................................................... 11
8. Common faults and troubleshooting.......................................................................................................12
9. Guarantee clause...................................................................................................................................... 12